一種基于GIS的城市道路巡檢路徑規(guī)劃方法與流程
本申請涉及路徑規(guī)劃,具體涉及一種基于gis的城市道路巡檢路徑規(guī)劃方法。
背景技術(shù):
1、目前,通常采用無人機(jī)對其城市道路進(jìn)行巡檢,且基于gis(geographicinformation?system)數(shù)據(jù)庫中的道路信息對無人機(jī)巡檢的路徑進(jìn)行規(guī)劃,同時(shí)用于采集道路信息,輔助城市道巡檢,便于觀察和掌握城市道路信息。
2、現(xiàn)有采用無人機(jī)進(jìn)行城市道路巡檢時(shí),需要根據(jù)相關(guān)規(guī)定限制無人機(jī)的飛行高度以及禁飛區(qū)域,在此基礎(chǔ)上設(shè)置起點(diǎn)到目標(biāo)點(diǎn)的坐標(biāo)信息,利用路徑規(guī)劃算法獲取城市道路巡檢路徑。其中,gis數(shù)據(jù)庫能夠提供大量的空間信息和坐標(biāo)信息。而在利用a星算法確定城市道路巡檢路徑時(shí),通常只考慮起點(diǎn)與目標(biāo)點(diǎn)之間的距離代價(jià),但是由于無人機(jī)在飛行過程中需要根據(jù)周圍建筑物、障礙物等物體的高度動(dòng)態(tài)調(diào)整飛行高度,使得巡檢時(shí)道路成像的分辨率發(fā)生變化,造成巡檢圖像模糊,容易導(dǎo)致城市道路巡檢時(shí)出現(xiàn)誤檢問題。
技術(shù)實(shí)現(xiàn)思路
1、為了解決現(xiàn)有技術(shù)中的不足,本申請?zhí)峁┮环N基于gis的城市道路巡檢路徑規(guī)劃方法,該方法基于a星算法計(jì)算,計(jì)算起點(diǎn)與當(dāng)前格柵之間的實(shí)際代價(jià)時(shí)引入了無人機(jī)經(jīng)每個(gè)格柵中心點(diǎn)上方采集道路圖像的位置質(zhì)量,將無人機(jī)在每個(gè)格柵中心點(diǎn)上方飛行的高度作為規(guī)劃巡檢路徑的因素,使得規(guī)劃的巡檢路徑更為精準(zhǔn),能夠使無人機(jī)沿著規(guī)劃好的路徑巡檢采集的道路圖像信息更清晰,從而提升了巡檢質(zhì)量。
2、本申請的目的是提供一種基于gis的城市道路巡檢路徑規(guī)劃方法,包括以下步驟:
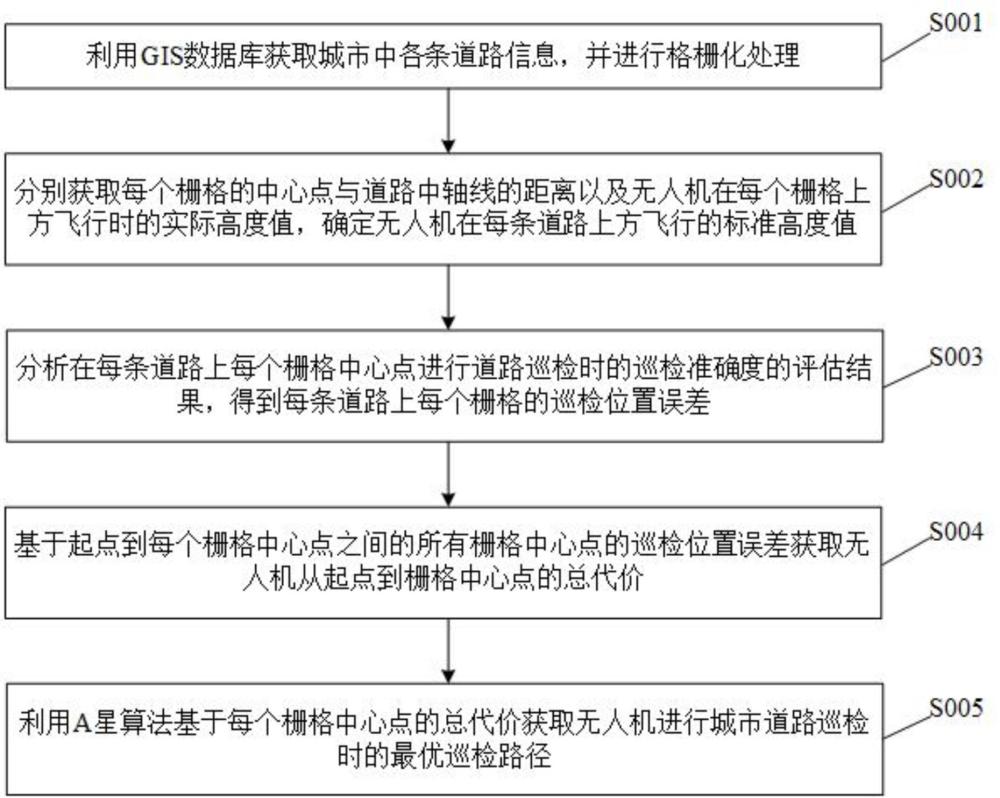
3、利用gis數(shù)據(jù)庫獲取城市中各條道路信息,并進(jìn)行格柵化處理;
4、基于無人機(jī)巡檢時(shí)的道路成像邊緣與道路實(shí)際邊緣的重合情況確定無人機(jī)在每條道路上方飛行的標(biāo)準(zhǔn)高度值;
5、基于在每條道路上每個(gè)柵格中心點(diǎn)進(jìn)行道路巡檢時(shí)的巡檢準(zhǔn)確度的評估結(jié)果,得到每條道路上每個(gè)柵格中心點(diǎn)的巡檢位置誤差;
6、基于起點(diǎn)到每個(gè)柵格中心點(diǎn)之間的所有柵格中心點(diǎn)的巡檢位置誤差獲取無人機(jī)從起點(diǎn)到柵格中心點(diǎn)的總代價(jià);
7、利用a星算法基于每個(gè)柵格中心點(diǎn)的總代價(jià)獲取無人機(jī)進(jìn)行城市道路巡檢時(shí)的最優(yōu)巡檢路徑。
8、在一實(shí)施例中,所述標(biāo)準(zhǔn)高度值的獲取方法為:
9、將無人機(jī)在每條道路上巡檢時(shí)道路圖像中的邊緣線與道路的實(shí)際邊緣重合時(shí)無人機(jī)的飛行高度為每條道路的標(biāo)準(zhǔn)高度值。
10、在一實(shí)施例中,所述每條道路上每個(gè)柵格的巡檢位置誤差的獲取方法為:
11、確定每個(gè)柵格與每個(gè)柵格所在道路中軸線之間的距離;
12、計(jì)算無人機(jī)在每條道路上每個(gè)柵格上飛行的實(shí)際高度值與無人機(jī)在每條道路上的標(biāo)準(zhǔn)高度值之間差值的絕對值;
13、將所述絕對值與所述距離的乘積作為每條道路上每個(gè)柵格中心點(diǎn)的巡檢位置誤差。
14、在一實(shí)施例中,所述無人機(jī)從起點(diǎn)到柵格中心點(diǎn)的總代價(jià)的確定方法為:
15、基于起點(diǎn)到每個(gè)柵格之間所有柵格中心點(diǎn)的巡檢位置誤差確定每個(gè)柵格中心點(diǎn)的誤差特征值;基于所述誤差特征值,結(jié)合每個(gè)柵格中心點(diǎn)的巡檢位置誤差,起點(diǎn)的巡檢位置誤差確定每個(gè)柵格中心點(diǎn)的實(shí)際代價(jià);
16、基于起點(diǎn)到每個(gè)柵格的預(yù)計(jì)代價(jià)與每個(gè)柵格中心點(diǎn)的實(shí)際代價(jià)確定起點(diǎn)到每個(gè)柵格的總代價(jià)。
17、在一實(shí)施例中,所述每個(gè)柵格中心點(diǎn)的誤差特征值的確定方式為:
18、對于任意一條道路上的每個(gè)柵格,按照與起點(diǎn)之間歐式距離由小到大的順序,將起點(diǎn)到每個(gè)柵格之間所有柵格中心點(diǎn)的巡檢位置誤差排列得到每個(gè)柵格中心點(diǎn)的特征序列;
19、利用數(shù)據(jù)擬合的方式獲取所述特征序列中所有元素?cái)M合斜率的均值作為每個(gè)柵格中心點(diǎn)的誤差特征值。
20、在一實(shí)施例中,所述每個(gè)柵格中心點(diǎn)的實(shí)際代價(jià)的確定方式為:
21、計(jì)算每個(gè)柵格中心點(diǎn)的巡檢位置誤差與起點(diǎn)的巡檢位置誤差之間的差值;將所述差值在指數(shù)函數(shù)中的映射結(jié)果與每個(gè)柵格中心點(diǎn)的誤差特征值在指數(shù)函數(shù)中的映射結(jié)果的乘積作為每個(gè)柵格中心點(diǎn)的實(shí)際代價(jià)。
22、在一實(shí)施例中,所述起點(diǎn)到每個(gè)柵格的總代價(jià)的確定方式為:
23、計(jì)算起點(diǎn)與每個(gè)柵格中心點(diǎn)之間的歐式距離與每個(gè)柵格中心點(diǎn)的實(shí)際代價(jià)的乘積,將所述乘積與每個(gè)柵格中心點(diǎn)的預(yù)計(jì)代價(jià)之和作為起點(diǎn)到每個(gè)柵格的總代價(jià)。
24、在一實(shí)施例中,所述無人機(jī)在每條道路上每個(gè)柵格上飛行的實(shí)際高度值的獲取方法為:
25、如果不考慮道路的海拔,無人機(jī)在每個(gè)格柵上方飛行時(shí)的實(shí)際高度值是根據(jù)無人機(jī)上gps模塊所獲取的高度值;
26、如果考慮道路的海拔,則將gps模塊獲取的高度值減去道路的海拔的差值作為無人機(jī)的實(shí)際高度值。
27、在一實(shí)施例中,所述最優(yōu)巡檢路徑的獲取方法為:
28、確定待規(guī)劃路徑的起點(diǎn);
29、定義兩個(gè)隊(duì)列openlist和closelist,openlist存儲(chǔ)待探索的柵格,closelist存儲(chǔ)已經(jīng)探索過的柵格;
30、利用a星算法基于總代價(jià)v的計(jì)算方式對兩個(gè)隊(duì)列openlist和closelist中的柵格進(jìn)行循環(huán)更新,直到openlist中存在終點(diǎn),或者openlist為空,停止搜索;
31、基于搜索過程中確定的父節(jié)點(diǎn),從終點(diǎn)開始按照父節(jié)點(diǎn)指針逆向回溯,直至回溯到起點(diǎn),即可得到最優(yōu)巡檢路徑。
32、在一實(shí)施例中,所述待規(guī)劃路徑的起點(diǎn)的巡檢位置誤差初始化為0。
33、本申請的有益效果是:本申請?zhí)峁┑囊环N基于gis的城市道路巡檢路徑規(guī)劃方法,首先對城市巡檢道路進(jìn)行格柵化處理,以便于后續(xù)規(guī)劃的無人機(jī)飛行路徑中各個(gè)飛行位置的精度足夠高,避免產(chǎn)生定位偏差;其次,在基于無人機(jī)在每條道路上進(jìn)行巡檢時(shí)道路成像誤差的分析確定每條道路的標(biāo)準(zhǔn)飛行高度,將飛行高度的變化造成的巡檢誤差作為后續(xù)計(jì)算總代價(jià)的一種影響因素,依次提高選擇柵格時(shí)的準(zhǔn)確率;之后,基于起點(diǎn)與每個(gè)柵格中心點(diǎn)之間的無人機(jī)經(jīng)過其余柵格時(shí)巡檢誤差的變化特征,評估起始點(diǎn)到第i條道路第j個(gè)柵格中心點(diǎn)的過程中巡檢誤差的整體水平,得到每個(gè)柵格中心點(diǎn)的實(shí)際代價(jià);通過優(yōu)化a星算法中總代價(jià)的計(jì)算方式,引入了無人機(jī)經(jīng)每個(gè)格柵中心點(diǎn)上方采集道路圖像的位置質(zhì)量以及飛行的高度作為規(guī)劃巡檢路徑的影響因素,使得規(guī)劃的巡檢路徑更為精準(zhǔn),能夠使無人機(jī)沿著規(guī)劃好的路徑巡檢采集的道路圖像信息更清晰,從而提升巡檢質(zhì)量。
技術(shù)特征:
1.一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,包括以下步驟:
2.根據(jù)權(quán)利要求1所述的一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,所述標(biāo)準(zhǔn)高度值的獲取方法為:
3.根據(jù)權(quán)利要求1所述的一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,所述每條道路上每個(gè)柵格的巡檢位置誤差的獲取方法為:
4.根據(jù)權(quán)利要求1所述的一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,所述每個(gè)柵格中心點(diǎn)的誤差特征值的確定方式為:
5.根據(jù)權(quán)利要求1所述的一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,所述每個(gè)柵格中心點(diǎn)的實(shí)際代價(jià)的確定方式為:
6.根據(jù)權(quán)利要求1所述的一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,所述起點(diǎn)到每個(gè)柵格的總代價(jià)的確定方式為:
7.根據(jù)權(quán)利要求3所述的一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,所述無人機(jī)在每條道路上每個(gè)柵格上飛行的實(shí)際高度值的獲取方法為:
8.根據(jù)權(quán)利要求1所述的一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,所述最優(yōu)巡檢路徑的獲取方法為:
9.根據(jù)權(quán)利要求8所述的一種基于gis的城市道路巡檢路徑規(guī)劃方法,其特征在于,所述待規(guī)劃路徑的起點(diǎn)的巡檢位置誤差初始化為0。
技術(shù)總結(jié)
本申請公開了一種基于GIS的城市道路巡檢路徑規(guī)劃方法,屬于路徑規(guī)劃技術(shù)領(lǐng)域;包括以下步驟:利用GIS數(shù)據(jù)庫獲取城市中各條道路信息,并進(jìn)行格柵化處理;基于無人機(jī)巡檢時(shí)的道路成像邊緣與道路實(shí)際邊緣的重合情況確定每條道路的標(biāo)準(zhǔn)高度值;基于在每個(gè)柵格中心點(diǎn)進(jìn)行巡檢時(shí)的巡檢準(zhǔn)確度的評估結(jié)果得到每個(gè)柵格中心點(diǎn)的巡檢位置誤差;基于起點(diǎn)到每個(gè)柵格中心點(diǎn)之間的所有柵格中心點(diǎn)的巡檢位置誤差獲取無人機(jī)從起點(diǎn)到柵格中心點(diǎn)的總代價(jià);利用A星算法基于總代價(jià)獲取巡檢時(shí)的最優(yōu)巡檢路徑。本申請將飛行高度與成像質(zhì)量作為規(guī)劃路徑的影響因素,使得規(guī)劃的巡檢路徑更為精準(zhǔn),降低漏檢概率,提高巡檢結(jié)果的準(zhǔn)確率。
技術(shù)研發(fā)人員:李文娜,劉權(quán),陳榮敏,谷友海,劉翔瑀
受保護(hù)的技術(shù)使用者:大連千璽網(wǎng)絡(luò)科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會(huì)獲得點(diǎn)贊!