河道疏浚用水位測深裝置的制作方法
本申請涉及水位測深,尤其是涉及一種河道疏浚用水位測深裝置。
背景技術(shù):
1、疏浚是指為了疏通河道清淤,挖除河道底部的淤泥。在疏浚之前會對河道的水位進行測量,以此確定需要挖除的深度。
2、傳統(tǒng)的,水位測量使用水尺,測量時水尺應(yīng)當垂直伸入水中,該過程為手動操作,但是河道水位并不是統(tǒng)一的,地勢、河道的彎曲等會導(dǎo)致不同位置不同水位,這就需要工作人員多點測量,理論是可以沿著岸邊邊走邊測量,但是實際河道兩邊會有各類設(shè)施,有些位置不一定能過去。
3、目前,測量水位、水深、積淤,還可以通過無人測量船進行檢測,但是現(xiàn)有的無人測量船往往需要搭載衛(wèi)星定位系統(tǒng)、單波束/多波束測深雷達、避障雷達等電器元件,整體價格較高,但是街道、景區(qū)等遇上清淤需求時實際并沒有以上諸多功能需求的必要性,即現(xiàn)有的測量船性價比不高,與需求場景適配度相對較低,因此本申請?zhí)岢鲆环N新的技術(shù)方案。
技術(shù)實現(xiàn)思路
1、為了提高河道清淤測量過程中的裝置適配度,本申請?zhí)峁┮环N河道疏浚用水位測深裝置。
2、本申請?zhí)峁┮环N河道疏浚用水位測深裝置,采用如下的技術(shù)方案:
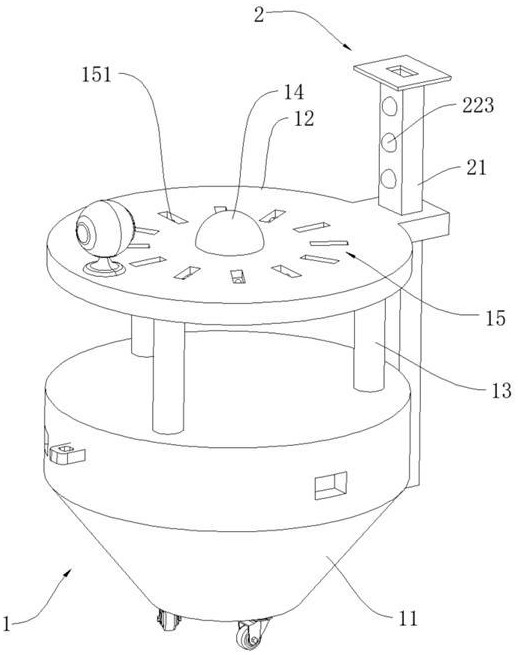
3、一種河道疏浚用水位測深裝置,包括平衡機構(gòu)、測量水位的測量機構(gòu)、岸側(cè)模塊、攝像頭和控制器,所述平衡機構(gòu)包括作為浮體的底座、升降桿、平衡板以及水平泡,所述升降桿有多個且一端連接于底座,另一端向上活動連接于平衡板;所述水平泡固定于平衡板且位于平衡板的中心;
4、所述測量機構(gòu)包括尺板、用于提示尺板是否伸入水中的提示組件以及驅(qū)使尺板升降的驅(qū)動單元,所述平衡板越過底座的側(cè)壁伸出,且平衡板沿厚度方向開設(shè)有供尺板穿過的引導(dǎo)孔,所述尺板設(shè)有沿長度方向分布的刻度,所述尺板垂直于平衡板且從引導(dǎo)孔中穿過與平衡板呈滑移連接,所述尺板的頂端朝向外側(cè)翻折形成限位,所述提示組件包括電極針一、電極針二以及提示燈,所述電極針一和電極針二朝向尺板伸向水面的端部伸出,所述提示燈與電極針一、電極針二電連接,所述提示燈安裝于尺板靠近頂端的側(cè)壁,所述控制器電連接于驅(qū)動單元;
5、所述平衡板上安裝有拍攝水平泡和尺板的攝像頭,所述攝像頭位于平衡板上,所述岸側(cè)模塊包括個人終端、和控制器無線連接的遙控器以及用作在岸側(cè)傾斜和水平探測測量機構(gòu)的激光測距儀。
6、可選的,所述升降桿包括電缸,所述電缸的缸體固定于底座且伸縮桿端鉸接于平衡板,所述電缸電連接于控制器。
7、可選的,所述平衡板環(huán)繞水平泡挖設(shè)有多個凹槽,所述凹槽的長度沿水平泡徑向延伸,所述平衡板設(shè)有調(diào)平組件,所述調(diào)平組件包括鋼球以及薄膜壓力傳感器,所述薄膜壓力傳感器固定于凹槽遠離水平泡的內(nèi)壁,所述薄膜壓力傳感器電連接于控制器。
8、可選的,所述控制器配置為:
9、定義水平泡的位置為三維空間坐標系的原點;
10、在平衡板上取四個均勻環(huán)繞原點分布的取樣點,且分別稱為a、b、c、d,且a和b對稱,c和d對稱,a的坐標為(x1,y1,z1),b的坐標為(x2,y2,z2),c的坐標為(x3,y3,z3),d的坐標為(x4,y4,z4);
11、若z1>z2,則令位于原點背離b一側(cè)的電缸收縮,直到薄膜壓力傳感器反饋的壓力值為設(shè)定的標準值時停止;若z1<z2,則令位于原點背離a一側(cè)的電缸收縮,直到薄膜壓力傳感器反饋的壓力值為設(shè)定的標準值時停止;
12、若z3>z4,則令位于原點背離d一側(cè)的電缸收縮,直到薄膜壓力傳感器反饋的壓力值為設(shè)定的標準值時停止;若z3<z4,則令位于原點背離c一側(cè)的電缸收縮,直到薄膜壓力傳感器反饋的壓力值為設(shè)定的標準值時停止。
13、可選的,所述控制器電連接于提示組件和驅(qū)動單元,且配置為:判斷是否接收到預(yù)設(shè)的自動調(diào)節(jié)指令,如果是,則在提示組件的反饋表示接觸水面時停止電缸和驅(qū)動單元。
14、可選的,所述尺板內(nèi)部中空且設(shè)有多組提示組件,每組所述提示組件中的電極針一和電極針二沿尺板長度方向排布且分別與對應(yīng)的提示燈的正負極連接,所述提示燈沿尺板長度方向排布且位于尺板遠離水面的一段。
15、可選的,所述激光測距儀上安裝有激光器,所述激光器的激光平行激光測距儀的探測路徑。
16、可選的,所述凹槽的底面自中心向兩端高度變大。
17、綜上所述,本申請包括以下有益技術(shù)效果:以激光測距儀、水平泡等組合即可讓工作人員站在岸邊實現(xiàn)對河道各個位置測水位的需求,不需要雷達、波束探測儀,所以性價比更高,可以提高河道清淤測量過程中的裝置和實際需求的適配度。
技術(shù)特征:
1.一種河道疏浚用水位測深裝置,其特征在于:包括平衡機構(gòu)(1)、測量水位的測量機構(gòu)(2)、岸側(cè)模塊、攝像頭和控制器(3),所述平衡機構(gòu)(1)包括作為浮體的底座(11)、升降桿(13)、平衡板(12)以及水平泡(14),所述升降桿(13)有多個且一端連接于底座(11),另一端向上活動連接于平衡板(12);所述水平泡(14)固定于平衡板(12)且位于平衡板(12)的中心;
2.根據(jù)權(quán)利要求1所述的河道疏浚用水位測深裝置,其特征在于:所述升降桿(13)包括電缸,所述電缸的缸體固定于底座(11)且伸縮桿端鉸接于平衡板(12),所述電缸電連接于控制器(3)。
3.根據(jù)權(quán)利要求2所述的河道疏浚用水位測深裝置,其特征在于:所述平衡板(12)環(huán)繞水平泡(14)挖設(shè)有多個凹槽,所述凹槽的長度沿水平泡(14)徑向延伸,所述平衡板(12)設(shè)有調(diào)平組件(15),所述調(diào)平組件(15)包括鋼球(151)以及薄膜壓力傳感器,所述薄膜壓力傳感器固定于凹槽遠離水平泡(14)的內(nèi)壁,所述薄膜壓力傳感器電連接于控制器(3)。
4.根據(jù)權(quán)利要求3所述的河道疏浚用水位測深裝置,其特征在于,所述控制器(3)配置為:
5.根據(jù)權(quán)利要求4所述的河道疏浚用水位測深裝置,其特征在于:所述控制器(3)電連接于提示組件(22)和驅(qū)動單元,且配置為:判斷是否接收到預(yù)設(shè)的自動調(diào)節(jié)指令,如果是,則在提示組件(22)的反饋表示接觸水面時停止電缸和驅(qū)動單元。
6.根據(jù)權(quán)利要求1所述的河道疏浚用水位測深裝置,其特征在于:所述尺板(21)內(nèi)部中空且設(shè)有多組提示組件(22),每組所述提示組件(22)中的電極針一(221)和電極針二(222)沿尺板(21)長度方向排布且分別與對應(yīng)的提示燈(223)的正負極連接,所述提示燈(223)沿尺板(21)長度方向排布且位于尺板(21)遠離水面的一段。
7.根據(jù)權(quán)利要求1所述的河道疏浚用水位測深裝置,其特征在于:所述激光測距儀上安裝有激光器,所述激光器的激光平行激光測距儀的探測路徑。
8.根據(jù)權(quán)利要求3所述的河道疏浚用水位測深裝置,其特征在于:所述凹槽的底面自中心向兩端高度變大。
技術(shù)總結(jié)
本發(fā)明公開了一種河道疏浚用水位測深裝置,涉及水位測深技術(shù)領(lǐng)域,其包括平衡機構(gòu)、測量水位的測量機構(gòu)、岸側(cè)模塊、攝像頭和控制器,平衡機構(gòu)包括底座、升降桿、平衡板以及水平泡,水平泡固定于平衡板且位于平衡板的中心;測量機構(gòu)包括尺板、用于提示尺板是否伸入水中的提示組件以及驅(qū)使尺板升降的驅(qū)動單元,所述尺板設(shè)有沿長度方向分布的刻度,尺板垂直于平衡板且與平衡板呈滑移連接,提示組件包括電極針一、電極針二以及提示燈,所述電極針一和電極針二朝向尺板伸向水面的端部伸出,所述提示燈與電極針一、電極針二電連接。本申請具有使測量得到的數(shù)據(jù)更加精準的效果。
技術(shù)研發(fā)人員:趙玉田,董宇路,王劍春,李海龍,蔡明星,張軍濤,胡靈鋒,呂樂,李勝利
受保護的技術(shù)使用者:中交上海航道局有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!