一種履帶底盤小農機運動控制系統的制作方法
本發明涉及機器人領域,特別涉及機器人運動控制領域。
背景技術:
1、現有的底盤小農機運動控制大多還處于“能動就行”的簡單邏輯層面。在底盤行走裝置驅動器的基礎上,配套pwm模式的遙控器,實現簡單的行走、拐彎功能。但該種方案是不具備可拓展性的,無法做到對底盤上安裝的功能套件進行操控,無法做到指令性的自主動作,直行糾偏、拐彎角度等等問題無法得到完善的解決。
2、現有的底盤小農機運動控制機械系統,多為輪式結構,以阿克曼結構為主,阿克曼轉向結構底盤類似現實中的真實的汽車底盤。底盤前兩輪用于控制小車運動方向,后兩輪用于控制其速度。小車在轉彎時,后輪之間存在差速的問題,顯然沒轉完的時候內側的輪胎要比外側的輪胎轉速慢。
3、傳統的輪式底盤小車使用機械差速器完成差速,機械差速器的基本運動規律是:無論轉彎或者直行,兩側驅動車輪的轉速之和等于差速器外殼轉速的2倍,例如差速器殼轉速為v,則內側后輪的轉速為v-a,外側后輪的轉速為v+a。
4、在純電新能源技術的普及下,使用電機直接驅動后輪,不需要機械差速,使得機械設計更加簡單。這樣在電控方面就更加復雜一點。
5、現有的履帶式底盤運動控制算法與輪式結構控制算法基本一致。但由于上述算法是要基于履帶車具備底盤控制器5的前提下才能在運動過程中使用的,現有的履帶機器人仍處于沒有完善的底盤控制器,仍然沿用著輪式結構的處理方式,還處于“能動就行”的思維死循環中。
技術實現思路
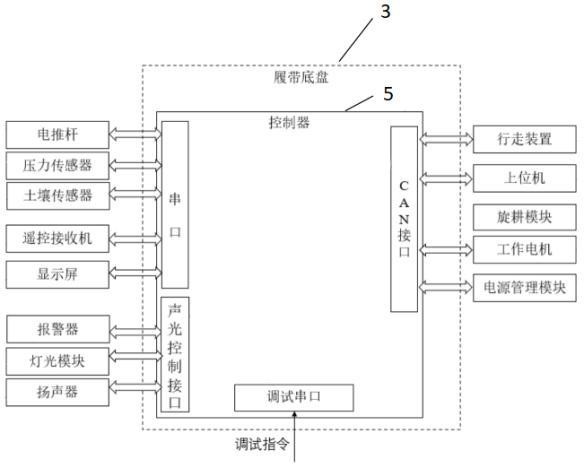
1、為了解決上述問題,本發明公開履帶底盤小農機運動控制系統,包括履帶底盤以及分別與所述履帶底盤連接的車身殼體、行走裝置、控制器和電源管理裝置,所述控制器和電源管理裝置位于所述車身殼體內,其特征在于,所述控制器包括運動控制單元,用于對接收到的運動控制指令進行解析并對履帶底盤進行精確運動控制,所述控制器與行走裝置和電源管理裝置通過can接口連接。
2、在本發明的履帶底盤小農機運動控制系統一實施例中,還包括設置在殼體內的上位機,所述上位機通過所述can接口與所述控制器連接。
3、在本發明的履帶底盤小農機運動控制系統一實施例中,還包括設置在殼體外側的測土組件,所述測土組件包括土壤傳感器、壓力傳感器、電推桿,所述電推桿與壓力傳感器和土壤傳感器連接;所述控制器與所述壓力傳感器、土壤傳感器和電推桿通過串口連接。
4、在本發明的履帶底盤小農機運動控制系統一實施例中,還包括設置在殼體內的遙控器接收機,用于接收遙控器的遙控信號,所述遙控器接收機和所述控制器通過串口連接。
5、在本發明的履帶底盤小農機運動控制系統一實施例中,還包括設置在殼體外側的顯示屏,所述顯示屏和所述控制器通過串口連接。
6、在本發明的履帶底盤小農機運動控制系統一實施例中,還包括設置在殼體外側的聲光外設,所述聲光外設通過所述控制器的聲光控制接口和控制器連接,所述聲光外設進一步包括報警器、燈光模塊和揚聲器。
7、在本發明的履帶底盤小農機運動控制系統一實施例中,還包括設置在殼體外側的從機功能組件,所述從機功能組件包括工作電機和與所述工作電機連接的旋耕模塊,所述工作電機通過所述can接口與所述控制器連接。
8、在本發明的履帶底盤小農機運動控制系統一實施例中,所述控制器還包括調試串口,用于接收調試信號對所述履帶底盤進行測試。
9、在本發明的履帶底盤小農機運動控制系統一實施例中,所述控制器為stm32f系列單片機。
技術特征:
1.一種履帶底盤小農機運動控制系統,包括履帶底盤以及安裝在所述履帶底盤上的車身殼體、行走裝置、控制器和電源管理裝置,所述控制器和電源管理裝置位于所述車身殼體內,其特征在于,所述控制器又包括運動控制單元,用于對接收到的運動控制指令進行解析并對履帶底盤進行精確運動控制;其中,所述控制器與行走裝置和電源管理裝置通過can接口連接。
2.根據權利要求1所述的履帶底盤小農機運動控制系統,其特征在于,還包括設置在所述殼體內的上位機,所述上位機通過所述can接口與所述控制器連接。
3.根據權利要求1所述的履帶底盤小農機運動控制系統,其特征在于,還包括設置在所述殼體外側的測土組件,所述測土組件包括土壤傳感器、壓力傳感器、電推桿,所述電推桿與壓力傳感器和土壤傳感器連接;所述控制器與所述壓力傳感器、土壤傳感器和電推桿通過串口連接。
4.根據權利要求1所述的履帶底盤小農機運動控制系統,其特征在于,還包括設置在所述殼體內的遙控器接收機,用于接收遙控器的遙控信號,所述遙控器接收機和所述控制器通過串口連接。
5.根據權利要求1所述的履帶底盤小農機運動控制系統,其特征在于,還包括設置在所述殼體外側的顯示屏,所述顯示屏和所述控制器通過串口連接。
6.根據權利要求1所述的履帶底盤小農機運動控制系統,其特征在于,還包括設置在所述殼體外側的聲光外設,所述聲光外設通過所述控制器的聲光控制接口和控制器連接,所述聲光外設進一步包括報警器、燈光模塊和揚聲器。
7.根據權利要求1所述的履帶底盤小農機運動控制系統,其特征在于,還包括設置在所述殼體外側的從機功能組件,所述從機功能組件包括工作電機和與所述工作電機連接的旋耕模塊,所述工作電機通過所述can接口與所述控制器連接。
8.根據權利要求1所述的履帶底盤小農機運動控制系統,其特征在于,所述控制器還包括調試串口,用于接收調試信號對所述履帶底盤進行測試。
9.根據權利要求1至8任一項所述的履帶底盤小農機運動控制系統,其特征在于,所述控制器為微處理器或單片機。
10.根據權利要求9任一項所述的履帶底盤小農機運動控制系統,其特征在于,所述單片機為stm32f系列單片機。
技術總結
本發明為一種履帶底盤小農機運動控制系統,包括履帶底盤以及分別與履帶底盤連接的車身殼體、行走裝置、控制器和電源管理裝置,控制器和電源管理裝置位于車身殼體內,控制器包括運動控制單元,用于對接收到的運動控制指令進行解析并對履帶底盤進行精確運動控制;控制器與行走裝置和電源管理裝置通過CAN接口連接。
技術研發人員:陳海華,張玉成,呼凱倫,李同濱,韓義江,張守陽,傅建行,鐘文強,張凱文
受保護的技術使用者:山東中科智能農業機械裝備技術創新中心
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!