繞障飛行方法、裝置、無人設備及存儲介質與流程
本申請涉及無人設備,尤其涉及一種繞障飛行方法、裝置、無人設備及存儲介質。
背景技術:
1、隨著無人設備技術的快速發展,其被廣泛應用到各種場景下進行高空作業。當無人設備在農田或其他存在障礙物的作業區域內作業時,無人設備識別障礙物并進行繞障飛行是實現自主作業的重要技術之一。
2、在現有技術中,可在無人設備作業前,提前對作業區域的障礙物進行測繪,標識出障礙物和避障區域,以在作業過程中,當無人設備達到設定避障區域時,按照障礙物的位置控制無人設備實現繞障飛行。但避障區域和障礙物的標注需增加測繪的投入和工作量,而且對障礙物的測繪、無人設備的定位精度都有較高的要求,技術實現成本較高,暫時無法普及應用。
技術實現思路
1、本申請提供一種繞障飛行方法、裝置、無人設備及存儲介質,以通過語義信息輔助雷達的判斷,實現對障礙物的精準三維感知,保證無人設備的繞障飛行的安全性,解決了現有技術中繞障飛行的技術實現成本較高的問題,提高了無人設備的適用性。
2、第一方面,本申請提供了一種繞障飛行方法,包括:
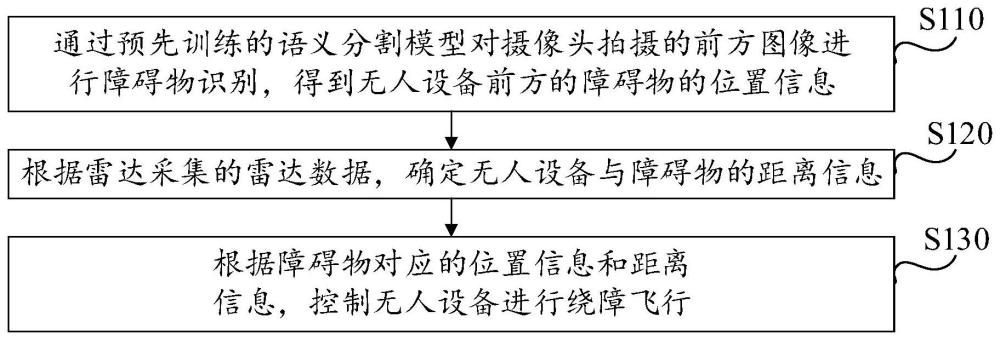
3、通過預先訓練的語義分割模型對攝像頭拍攝的前方圖像進行障礙物識別,得到無人設備前方的障礙物的位置信息;
4、根據雷達采集的雷達數據,確定所述無人設備與所述障礙物的距離信息;
5、根據所述障礙物對應的位置信息和距離信息,控制所述無人設備進行繞障飛行。
6、第二方面,本申請提供了一種繞障飛行裝置,包括:
7、位置檢測模塊,被配置為通過預先訓練的語義分割模型對攝像頭拍攝的前方圖像進行障礙物識別,得到無人設備前方的障礙物的位置信息;
8、距離檢測模塊,被配置為根據雷達采集的雷達數據,確定所述無人設備與所述障礙物的距離信息;
9、繞障飛行模塊,被配置為根據所述障礙物對應的位置信息和距離信息,控制所述無人設備進行繞障飛行。
10、第三方面,本申請提供了一種無人設備,包括:
11、一個或多個處理器;存儲器,存儲一個或多個程序,當所述一個或多個程序被所述一個或多個處理器執行,使得所述一個或多個處理器實現如第一方面所述的繞障飛行方法。
12、第四方面,本申請提供了一種包含計算機可執行指令的存儲介質,所述計算機可執行指令在由計算機處理器執行時用于執行如第一方面所述的繞障飛行方法。
13、在本申請中,通過無人設備搭載的攝像頭拍攝無人設備的前方圖像,通過預先訓練的語義分割模型對該前方圖像進行語義分割以識別出前方圖像中的障礙物,進而確定出無人設備前方障礙物的位置信息。通過無人設備安裝的雷達向無人設備前方發出探測信號以確定出無人設備與前方障礙物的距離信息。可根據前方障礙物的位置信息以及距離信息,控制無人設備飛行時繞開前方障礙物,避免無人設備撞擊到障礙物,保證無人設備的繞障飛行的安全性。通過上述技術手段,將從前方圖像中獲取到的語義信息輔助雷達檢測前方障礙物的判斷,以通過簡單傳感器的數據融合實現對障礙物的精準三維感知,技術實現成本較低,解決了現有技術中對障礙物進行提前測繪而導致繞障飛行的技術實現成本較高的問題,提高了無人設備的適用性。
技術特征:
1.一種繞障飛行方法,其特征在于,包括:
2.根據權利要求1所述的繞障飛行方法,其特征在于,所述語義分割模型為雙通道網絡模型。
3.根據權利要求2所述的繞障飛行方法,其特征在于,所述雙通道網絡模型包括上下文路徑網絡、空間路徑網絡、上下文引導聚合網絡和細節優化網絡;
4.根據權利要求3所述的繞障飛行方法,其特征在于,所述細節優化網絡包括卷積層和上采樣層;相應的,所述將所述融合特征信息輸入所述細節優化網絡,得到所述細節優化網絡輸出的所述前方圖像的語義信息,包括:
5.根據權利要求1所述的繞障飛行方法,其特征在于,在所述通過預先訓練的語義分割模型對攝像頭拍攝的前方圖像進行障礙物識別之前,還包括:
6.根據權利要求5所述的繞障飛行方法,其特征在于,所述根據所述語義信息預測結果,在所述多個第二樣本圖像中抽取第三樣本圖像,包括:
7.根據權利要求1所述的繞障飛行方法,其特征在于,所述根據所述障礙物對應的位置信息和距離信息,控制所述無人設備進行繞障飛行,包括:
8.一種繞障飛行裝置,其特征在于,包括:
9.一種無人設備,其特征在于,包括:
10.一種包含計算機可執行指令的存儲介質,其特征在于,所述計算機可執行指令在由計算機處理器執行時用于執行如權利要求1-7任一所述的繞障飛行方法。
技術總結
本申請公開一種繞障飛行方法、裝置、無人設備及存儲介質,涉及無人設備技術領域。該方法包括:通過預先訓練的語義分割模型對攝像頭拍攝的前方圖像進行障礙物識別,得到無人設備前方的障礙物的位置信息;根據雷達采集的雷達數據,確定無人設備與障礙物的距離信息;根據障礙物對應的位置信息和距離信息,控制無人設備進行繞障飛行。通過上述技術手段,解決了現有技術中繞障飛行的技術實現成本較高的問題,提高了無人設備的適用性。
技術研發人員:李偉業,巫萬堅
受保護的技術使用者:廣州極飛科技股份有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!