基于數字孿生的物流系統仿真方法、裝置、設備及介質與流程
本發明涉及數字孿生,特別涉及一種基于數字孿生的物流系統仿真方法、裝置、設備及介質。
背景技術:
1、物流行業面臨著縮短新策略設計和驗證周期、并實現高效優化和靈活調配資源的迫切需求。數字孿生技術以其高效的驗證能力、持續的分析能力和智慧的決策能力,成為企業數字化轉型中的重要支撐力量,當前的物流系統往往非常復雜,涉及到多種組件和邏輯交互控制,同時物流系統中的物流線也極為龐大,其中的組件數目較多。現有的場景搭建技術直接將物流系統的整個場景看作一個整體進行快速組態,搭建虛擬場景并模擬出物流過程中的各種場景的效率有待提高,且由于搭建出的場景穩定性較低,通過邏輯仿真為物流決策提供支持的可靠性較低,難以滿足更高效、智能的物流管理和運營的需求。
2、綜上可見,如何準確且高效地對數字孿生場景進行仿真是目前亟待解決的問題。
技術實現思路
1、有鑒于此,本發明的目的在于提供一種基于數字孿生的物流系統仿真方法、裝置、設備及介質,能夠準確且高效地對數字孿生場景進行仿真。其具體方案如下:
2、第一方面,本技術提供了一種基于數字孿生的物流系統仿真方法,包括:
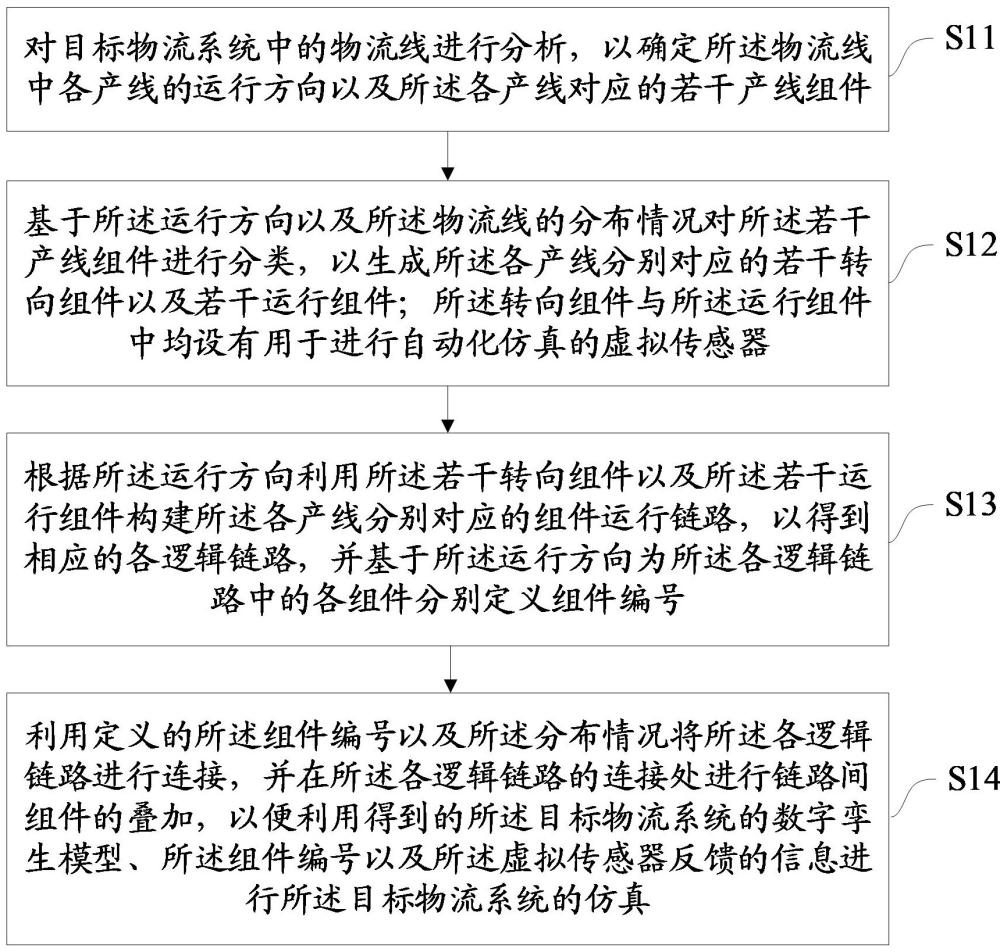
3、對目標物流系統中的物流線進行分析,以確定所述物流線中各產線的運行方向以及所述各產線對應的若干產線組件;
4、基于所述運行方向以及所述物流線的分布情況對所述若干產線組件進行分類,以生成所述各產線分別對應的若干轉向組件以及若干運行組件;所述轉向組件與所述運行組件中均設有用于進行自動化仿真的虛擬傳感器;
5、根據所述運行方向利用所述若干轉向組件以及所述若干運行組件構建所述各產線分別對應的組件運行鏈路,以得到相應的各邏輯鏈路,并基于所述運行方向為所述各邏輯鏈路中的各組件分別定義組件編號;
6、利用定義的所述組件編號以及所述分布情況將所述各邏輯鏈路進行連接,并在所述各邏輯鏈路的連接處進行鏈路間組件的疊加,以便利用得到的所述目標物流系統的數字孿生模型、所述組件編號以及所述虛擬傳感器反饋的信息進行所述目標物流系統的仿真。
7、可選的,所述基于所述運行方向為所述各邏輯鏈路中的各組件分別定義組件編號,包括:
8、針對所述各組件中的目標組件,基于所述目標組件的運行方向確定所述目標組件的運行終點,并為各所述運行終點分別設定一一對應的終點編號;所述目標組件為所述各組件中的任一組件;
9、確定所述目標組件的所述運行終點的終點數量;
10、若所述終點數量為一個時,則將所述目標組件的所述運行終點的所述終點編號作為所述目標組件的組件編號;
11、若所述終點數量為多個時,則將所述目標組件的所述運行終點的所述終點編號進行按位異或運算,以進行所述終點編號的疊加,并將得到的疊加后編號作為所述目標組件的組件編號;
12、其中,任意數量個終點編號經過疊加后得到的所述疊加后編號與所有的所述終點編號均不相同。
13、可選的,所述在所述各邏輯鏈路的連接處進行鏈路間組件的疊加,包括:
14、從所述各邏輯鏈路中分別確定所述各邏輯鏈路的連接處對應的連接鏈路集合,并對所述連接鏈路集合中各連接鏈路之間的高度進行評估,以得到所述各連接鏈路之間的高度差;
15、從所述各連接鏈路的組件中確定出所述連接處的目標運行組件以及目標轉向組件,并根據所述高度差對所述目標運行組件以及所述目標轉向組件進行疊加。
16、可選的,所述利用得到的所述目標物流系統的數字孿生模型、所述組件編號以及所述虛擬傳感器反饋的信息進行所述目標物流系統的仿真之前,還包括:
17、基于接收到的參數設定指令對所述各組件進行邏輯控制參數的設定,并將所述各組件中每個目標組件對應的上一組件以及下一組件的所述邏輯控制參數保存至所述目標組件中。
18、可選的,所述虛擬傳感器包括第一傳感器以及第二傳感器;其中,所述第一傳感器位于所述各組件沿各自對應的所述運行方向的組件末端處,用于檢測所述組件末端處是否存在物品,并在檢測到所述組件末端處存在物品時產生相應的第一觸發信號;所述第二傳感器平鋪并貼合于所述各組件的上方,用于檢測是否有物品到達當前組件以及識別物品的編號信息,并在檢測到有物品到達當前組件時產生相應的第二觸發信號。
19、可選的,所述利用得到的所述目標物流系統的數字孿生模型、所述組件編號以及所述虛擬傳感器反饋的信息進行所述目標物流系統的仿真,包括:
20、根據待運輸物品所對應的目標運行終點為所述待運輸物品分配相應的物品編號;
21、基于所述物品編號以及所述組件編號在得到的所述目標物流系統的數字孿生模型中進行所述待運輸物品的運輸;
22、當監測到所述各組件中任一組件的所述第二傳感器反饋的所述第二觸發信號時,則通過所述第二傳感器獲取所述待運輸物品的所述物品編號,并將當前組件的所述組件編號與所述物品編號進行按位與運算,以得到相應的第一運算結果;
23、若所述第一運算結果的值大于零,則啟動所述當前組件,并在監測到所述當前組件的所述第一傳感器反饋的所述第一觸發信號時,確定所述當前組件的下一組件的所述第二傳感器是否已產生相應的所述第二觸發信號;
24、若確定所述當前組件的下一組件的所述第二傳感器已產生相應的所述第二觸發信號,則判斷所述下一組件的所述第一傳感器是否已產生相應的所述第一觸發信號,以便基于得到的判斷結果確定是否允許繼續運輸所述待運輸物品。
25、可選的,所述基于所述物品編號以及所述組件編號在得到的所述目標物流系統的數字孿生模型中進行所述待運輸物品的運輸的過程中,包括:
26、當所述待運輸物品運輸至所述各邏輯鏈路的連接處時,監測到所述連接處的所述轉向組件以及所述運行組件中的所述第二傳感器反饋的所述第二觸發信號;
27、通過所述第二傳感器獲取所述待運輸物品的所述物品編號,并確定所述轉向組件的第一組件編號與所述運行組件的第二組件編號;
28、分別將所述第一組件編號以及所述第二組件編號與所述物品編號進行按位與運算,以得到相應的第二運算結果;
29、若所述第二運算結果中與所述第一組件編號運算得到的值大于零,則啟動所述轉向組件;
30、若所述第二運算結果中與所述第二組件編號運算得到的值大于零,則啟動所述運行組件。
31、第二方面,本技術提供了一種基于數字孿生的物流系統仿真裝置,包括:
32、物流線分析模塊,用于對目標物流系統中的物流線進行分析,以確定所述物流線中各產線的運行方向以及所述各產線對應的若干產線組件;
33、組件分類模塊,用于基于所述運行方向以及所述物流線的分布情況對所述若干產線組件進行分類,以生成所述各產線分別對應的若干轉向組件以及若干運行組件;所述轉向組件與所述運行組件中均設有用于進行自動化仿真的虛擬傳感器;
34、編號定義模塊,用于根據所述運行方向利用所述若干轉向組件以及所述若干運行組件構建所述各產線分別對應的組件運行鏈路,以得到相應的各邏輯鏈路,并基于所述運行方向為所述各邏輯鏈路中的各組件分別定義組件編號;
35、組件疊加模塊,用于利用定義的所述組件編號以及所述分布情況將所述各邏輯鏈路進行連接,并在所述各邏輯鏈路的連接處進行鏈路間組件的疊加,以便利用得到的所述目標物流系統的數字孿生模型、所述組件編號以及所述虛擬傳感器反饋的信息進行所述目標物流系統的仿真。
36、第三方面,本技術提供了一種電子設備,包括:
37、存儲器,用于保存計算機程序;
38、處理器,用于執行所述計算機程序,以實現前述的基于數字孿生的物流系統仿真方法。
39、第四方面,本技術提供了一種計算機可讀存儲介質,用于保存計算機程序;其中,所述計算機程序被處理器執行時實現前述的基于數字孿生的物流系統仿真方法。
40、本技術中,對目標物流系統中的物流線進行分析,以確定所述物流線中各產線的運行方向以及所述各產線對應的若干產線組件;基于所述運行方向以及所述物流線的分布情況對所述若干產線組件進行分類,以生成所述各產線分別對應的若干轉向組件以及若干運行組件;所述轉向組件與所述運行組件中均設有用于進行自動化仿真的虛擬傳感器;根據所述運行方向利用所述若干轉向組件以及所述若干運行組件構建所述各產線分別對應的組件運行鏈路,以得到相應的各邏輯鏈路,并基于所述運行方向為所述各邏輯鏈路中的各組件分別定義組件編號;利用定義的所述組件編號以及所述分布情況將所述各邏輯鏈路進行連接,并在所述各邏輯鏈路的連接處進行鏈路間組件的疊加,以便利用得到的所述目標物流系統的數字孿生模型、所述組件編號以及所述虛擬傳感器反饋的信息進行所述目標物流系統的仿真。由上可見,本技術先對目標物流系統中的物流線進行分析,以確定各產線的運行方向及對應的若干產線組件,基于所述運行方向以及所述物流線的分布情況對所述若干產線組件進行分類,以生成對應的若干轉向組件及若干運行組件,并根據所述運行方向利用所述若干轉向組件和所述若干運行組件構建各邏輯鏈路,同時為所述各邏輯鏈路中的各組件進行組件編號的定義,隨后利用所述組件編號以及所述分布情況將所述各邏輯鏈路連接,并在連接處進行鏈路間組件的疊加,以便利用得到的所述目標物流系統的數字孿生模型、所述組件編號以及所述虛擬傳感器反饋的信息進行所述目標物流系統的仿真。這樣一來,通過本技術的上述過程,將整個目標物流系統中的物流線劃分為若干邏輯鏈路,并基于運行方向為若干邏輯鏈路中的各組件進行組件編號的定義,針對劃分后的若干邏輯鏈路以及組件編號進行快速組態,減少了快速組態所需要的時間以及各組件之間的耦合度,進而準確且高效地對數字孿生場景進行仿真。
- 還沒有人留言評論。精彩留言會獲得點贊!