分數階多智能體系統的混合一致性控制方法及控制系統
本公開涉及多智能體控制相關,具體地說,是涉及一種分數階多智能體系統的混合一致性控制方法及控制系統。
背景技術:
1、本部分的陳述僅僅是提供了與本公開相關的背景技術信息,并不必然構成在先技術。
2、近年來,多智能體系統的協同控制在機器人編隊控制、無人機作戰控制等方面得到廣泛的應用,逐漸成為控制理論、統計物理學、應用數學、計算機科學等領域研究的熱點問題。一致性問題是多智能體系統實現協同控制所要解決的首要問題,其本質就是利用局部信息設計分布式控制方法最終使得所有智能體的狀態實現一致。在一些控制精度較高的系統中(如機器人編隊),要求系統盡可能快速地達到一致性目標。漸近一致性雖然可以最終實現一致,但收斂速度較慢,不符合這些系統對快速響應的需求。
3、有限時間一致性相較于漸近一致性具有顯著優勢,能夠保證系統更快地收斂。分數階多智能體系統相較于整數階多智能體系統,能夠更好地描述復雜的運動過程,但是,現有的分數階多智能體系統,通常只考慮單一誤差形式,缺乏對復雜誤差情況下一致性追蹤的研究,分數階的有限時間一致性相較于整數階有著更多的參數,計算和分析更加復雜;現有控制器多為非分布式或非自適應,無法兼顧分布式特性和動態環境下的自適應性需求,從而影響了分數階多智能體系統達到一致性目標的準確性和時效性,因此研究分數階多智能體系統有限時間同步問題具有十分重要的意義。
技術實現思路
1、本公開為了解決上述問題,提出了一種分數階多智能體系統的混合一致性控制方法及控制系統,在分數階多智能體系統中,針對多種誤差形式,實現高效、快速地有限時間一致性控制,并設計具有完全分布式和自適應特性的控制器,從而提高系統的魯棒性和適應性。
2、為了實現上述目的,本公開采用如下技術方案:
3、一個或多個實施例提供了分數階多智能體系統的混合一致性控制方法,包括如下步驟:
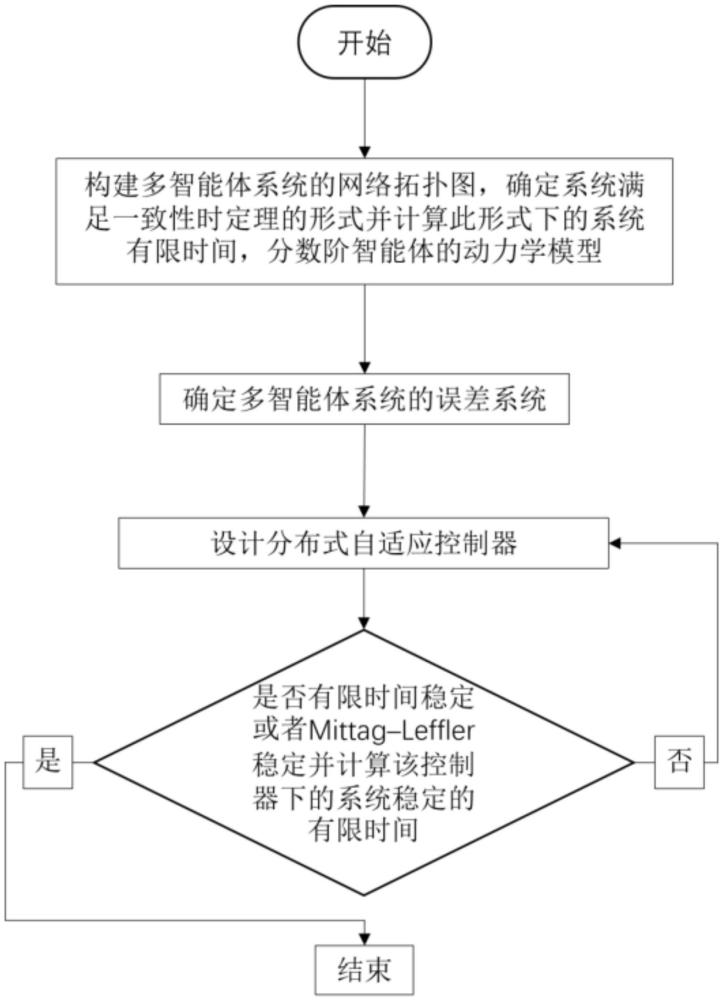
4、構建分數階多智能體系統的網絡拓撲圖,定義一致性定理,構建各分數階智能體的動力學模型;
5、根據動力學模型及網絡拓撲圖,基于多種誤差形式構建分數階多智能體系統的誤差系統,并設計多智能體系統滿足預設的假設條件時的參數矩陣信息;
6、分別針對不同的誤差類型設定自適應控制增益,結合一致性定理構建包括跟隨誤差線性項、誤差非線性項以及指數衰減項的分布式自適應控制器,根據設置的誤差系統以及參數矩陣信息,計算各個智能體的控制輸入,實現分數階多智能體系統的混合一致性控制。
7、一個或多個實施例提供了分數階多智能體系統的混合一致性控制系統,包括:
8、構建模塊,被配置為構建分數階多智能體系統的網絡拓撲圖,定義一致性定理,構建各分數階智能體的動力學模型;
9、誤差計算模塊,被配置為根據動力學模型及網絡拓撲圖,基于多種誤差形式構建分數階多智能體系統的誤差系統,并設計多智能體系統滿足預設的假設條件時的參數矩陣信息;
10、控制模塊,被配置為分別針對不同的誤差類型設定自適應控制增益,結合一致性定理構建包括跟隨誤差線性項、誤差非線性項以及指數衰減項的分布式自適應控制器,根據設置的誤差系統以及參數矩陣信息,計算各個智能體的控制輸入,實現分數階多智能體系統的混合一致性控制。
11、一種電子設備,包括存儲器和處理器以及存儲在存儲器上并在處理器上運行的計算機指令,所述計算機指令被處理器運行時,完成上述的分數階多智能體系統的混合一致性控制方法中的步驟。
12、一種計算機可讀存儲介質,用于存儲計算機指令,所述計算機指令被處理器執行時,完成上述的分數階多智能體系統的混合一致性控制方法中的步驟。
13、與現有技術相比,本公開的有益效果為:
14、本公開通過構造網絡拓撲圖和分數階智能體動力學模型,將分布式控制策略應用于智能體系統。誤差系統的設計綜合了多種誤差形式,并通過李雅普諾夫穩定性理論驗證了系統在控制器作用下的一致有界性。分布式自適應控制器利用跟隨誤差的動態反饋調整控制增益,結合指數函數逐步減弱控制強度,實現系統在有限時間內的快速收斂,同時避免控制過度或不穩定問題。
15、本公開通過自適應增益的動態調整,系統能夠在多種誤差形式和復雜動態環境下保持一致性;控制器基于局部信息分布式設計,減少全局信息的依賴,提升了系統的靈活性和拓展性。利用分數階動力學模型更精確地描述智能體的運動行為,提高控制策略的有效性。
16、本公開的優點以及附加方面的優點將在下面的具體實施例中進行詳細說明。
技術特征:
1.分數階多智能體系統的混合一致性控制方法,其特征在于,包括如下步驟:
2.如權利要求1所述的分數階多智能體系統的混合一致性控制方法,其特征在于:采用李雅普諾夫穩定性理論,驗證多智能體系統在設計的分布式自適應控制器的作用下實現一致有界。
3.如權利要求1所述的分數階多智能體系統的混合一致性控制方法,其特征在于,構建網絡拓撲圖,具體的:
4.如權利要求1所述的分數階多智能體系統的混合一致性控制方法,其特征在于:根據分數階動力學和耦合關系構建各分數階智能體的動力學模型。
5.如權利要求1所述的分數階多智能體系統的混合一致性控制方法,其特征在于:在多種誤差形式下,確定多智能體系統的誤差系統,誤差表示為:
6.如權利要求1所述的分數階多智能體系統的混合一致性控制方法,其特征在于:假定條件包括:
7.如權利要求1所述的分數階多智能體系統的混合一致性控制方法,其特征在于,分布式自適應控制器包括:
8.分數階多智能體系統的混合一致性控制系統,其特征在于,包括:
9.一種電子設備,其特征在于,包括存儲器和處理器以及存儲在存儲器上并在處理器上運行的計算機指令,所述計算機指令被處理器運行時,完成權利要求1-7任一項所述的分數階多智能體系統的混合一致性控制方法中的步驟。
10.一種計算機可讀存儲介質,其特征在于,用于存儲計算機指令,所述計算機指令被處理器執行時,完成權利要求1-7任一項所述的分數階多智能體系統的混合一致性控制方法中的步驟。
技術總結
本公開涉及多智能體控制技術領域,提出了一種分數階多智能體系統的混合一致性控制方法及控制系統,包括:構建分數階多智能體系統的網絡拓撲圖,定義一致性定理,構建各分數階智能體的動力學模型;基于多種誤差形式構建分數階多智能體系統的誤差系統,并確定假設條件時的參數矩陣信息;分別針對不同的誤差類型設定自適應控制增益,構建包括跟隨誤差線性項、誤差非線性項以及指數衰減項的分布式自適應控制器,計算各個智能體的控制輸入,實現分數階多智能體系統的混合一致性控制。本公開在分數階多智能體系統中,針對多種誤差形式,實現高效、快速地有限時間一致性控制,并設計具有完全分布式和自適應特性的控制器,從而提高系統的魯棒性和適應性。
技術研發人員:趙慧,商和晨,孫思遠
受保護的技術使用者:濟南大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!