一種光纜自動穿散件的控制方法及裝置與流程
本發(fā)明涉及自動穿散件的控制,尤其一種光纜自動穿散件的控制方法及裝置。
背景技術(shù):
1、目前,光纜廣泛應(yīng)用于互聯(lián)網(wǎng)基礎(chǔ)設(shè)施、電話網(wǎng)絡(luò)、有線電視和企業(yè)網(wǎng)絡(luò)等領(lǐng)域。它們能夠提供高帶寬、抗干擾性強(qiáng)、傳輸距離遠(yuǎn)等優(yōu)點(diǎn),在生產(chǎn)光纜過程中,需要在不同的場合穿不同規(guī)格的散件或者鋼管,因此工廠車間中,為提高生產(chǎn)光纜的效率,常采用自動穿散件裝置進(jìn)行穿散件。
2、在現(xiàn)有自動穿散件裝置中,其穿散件控制過程為:將光纜穿過穿刺刀,再穿到散件中,后光纜會依次經(jīng)過:刀盒、拉力輪a、夾具一、拉力輪b、第一牽引輪、第二牽引輪、夾具二、第一張力計;穿力輪c、第二張力計、穿力輪d,再穿過光纜盤上纜,最后通過自動張力氣囊裝置,將光纜張拉至施工要求。當(dāng)光纜從散件出來,穿過第一根拉力輪a和拉力輪b,在第一牽引輪前和第二牽引輪中間有夾具一,夾具一將光纜夾緊,使得光纜從第一根拉力輪a和拉力輪b到第一牽引輪,形成一個倒鉤形狀,然后第一牽引輪旋轉(zhuǎn),將光纜向前拉伸,進(jìn)行穿散件。
3、然而,在現(xiàn)有的穿散件控制過程中,散件堆成一盤,順序是隨機(jī)的,光纜在從當(dāng)前散件中穿過后,不能自動獲取下一個目標(biāo)散件,需要人工匹配,此時生產(chǎn)線處于停產(chǎn)狀態(tài),從而導(dǎo)致光纜自動穿散件時生產(chǎn)效率不高。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明提供了一種光纜自動穿散件的控制方法及裝置,以解決光纜自動穿散件時生產(chǎn)效率不高問題。
2、第一方面,為了解決上述技術(shù)問題,本發(fā)明提供了一種光纜自動穿散件的控制方法,包括:
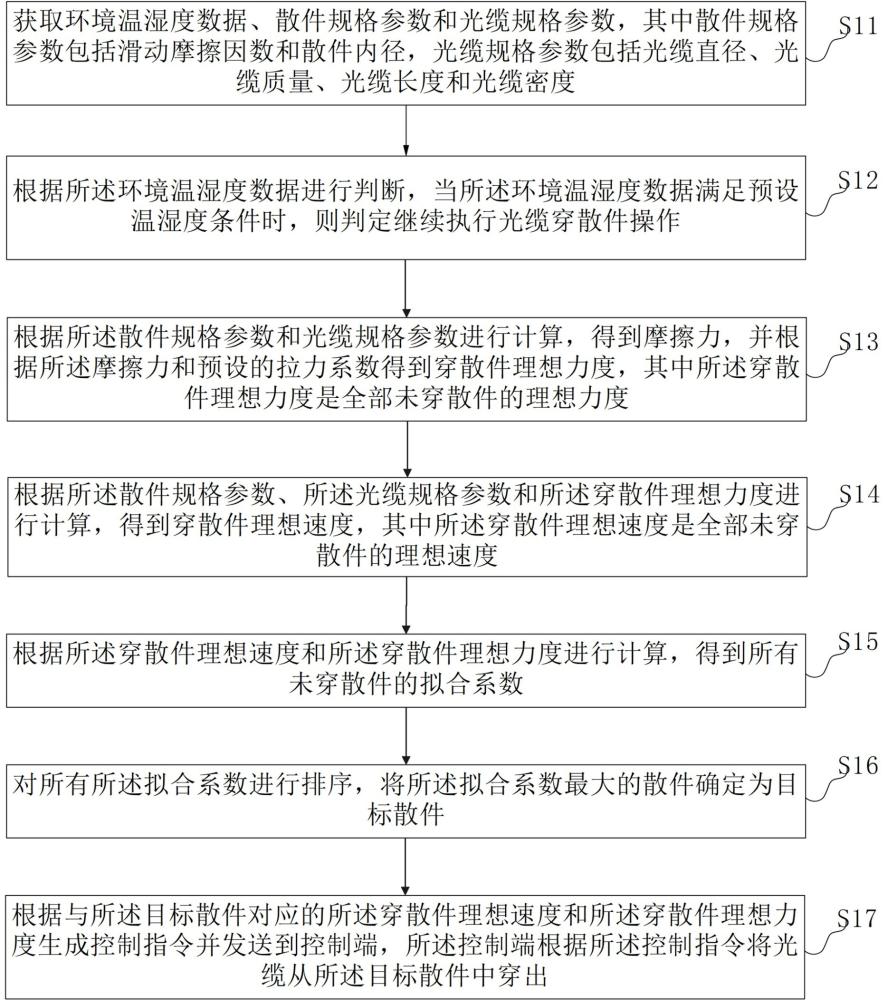
3、獲取環(huán)境溫濕度數(shù)據(jù)、散件規(guī)格參數(shù)和光纜規(guī)格參數(shù),其中散件規(guī)格參數(shù)包括滑動摩擦因數(shù)和散件內(nèi)徑,光纜規(guī)格參數(shù)包括光纜直徑、光纜質(zhì)量、光纜長度和光纜密度;
4、根據(jù)所述環(huán)境溫濕度數(shù)據(jù)進(jìn)行判斷,當(dāng)所述環(huán)境溫濕度數(shù)據(jù)滿足預(yù)設(shè)溫濕度條件時,則判定繼續(xù)執(zhí)行光纜穿散件操作;
5、根據(jù)所述散件規(guī)格參數(shù)和光纜規(guī)格參數(shù)進(jìn)行計算,得到摩擦力,并根據(jù)所述摩擦力和預(yù)設(shè)的拉力系數(shù)得到穿散件理想力度,其中所述穿散件理想力度是全部未穿散件的理想力度;
6、根據(jù)所述散件規(guī)格參數(shù)、所述光纜規(guī)格參數(shù)和所述穿散件理想力度進(jìn)行計算,得到穿散件理想速度,其中所述穿散件理想速度是全部未穿散件的理想速度;
7、根據(jù)所述穿散件理想速度和所述穿散件理想力度進(jìn)行計算,得到所有未穿散件的擬合系數(shù);
8、對所有所述擬合系數(shù)進(jìn)行排序,將所述擬合系數(shù)最大的散件確定為目標(biāo)散件;
9、根據(jù)與所述目標(biāo)散件對應(yīng)的所述穿散件理想速度和所述穿散件理想力度生成控制指令并發(fā)送到控制端,所述控制端根據(jù)所述控制指令將光纜從所述目標(biāo)散件中穿出。
10、在一種可選的實(shí)施方式中,所述根據(jù)所述環(huán)境溫濕度數(shù)據(jù)進(jìn)行判斷,包括:
11、當(dāng)溫度數(shù)據(jù)滿足預(yù)設(shè)的光纜溫度臨界范圍和散件溫度臨界范圍,并且濕度數(shù)據(jù)滿足預(yù)設(shè)的光纜濕度臨界范圍和散件濕度臨界范圍時,則判定繼續(xù)執(zhí)行光纜穿散件操作;
12、當(dāng)溫度數(shù)據(jù)不滿足預(yù)設(shè)的光纜溫度臨界范圍或散件溫度臨界范圍時,或者濕度數(shù)據(jù)不滿足預(yù)設(shè)的光纜濕度臨界范圍或散件濕度臨界范圍時,則判定執(zhí)行更換操作環(huán)境的操作。
13、在一種可選的實(shí)施方式中,所述根據(jù)所述散件規(guī)格參數(shù)和光纜規(guī)格參數(shù)進(jìn)行計算,得到摩擦力,并根據(jù)所述摩擦力和預(yù)設(shè)的拉力系數(shù)得到穿散件理想力度,包括:
14、通過以下公式計算摩擦力:
15、
16、其中,為摩擦力,為參考溫度和參考濕度下的滑動摩擦因數(shù),為滑動摩擦因數(shù)隨溫度變化的系數(shù),為滑動摩擦因數(shù)隨濕度變化的系數(shù),為參考溫度,為參考濕度,t為環(huán)境溫度,h為環(huán)境濕度,為光纜質(zhì)量,g為重力加速度;
17、通過以下公式計算穿散件理想力度:
18、
19、其中,為穿散件理想力度,k為拉力函數(shù)。
20、在一種可選的實(shí)施方式中,所述根據(jù)所述散件規(guī)格參數(shù)、所述光纜規(guī)格參數(shù)和所述穿散件理想力度進(jìn)行計算,得到穿散件理想速度,包括:
21、通過以下公式計算穿散件理想速度:
22、
23、其中,為穿散件理想力度,為穿散件理想速度,為參考溫度和參考濕度下的滑動摩擦因數(shù),為光纜密度,為光纜長度,為重力加速度。
24、在一種可選的實(shí)施方式中,在所述根據(jù)所述穿散件理想速度和所述穿散件理想力度進(jìn)行計算,得到所有未穿散件的擬合系數(shù),包括:
25、通過以下公式計算擬合系數(shù):
26、
27、其中,為第i個散件的擬合系數(shù),為參考溫度和參考濕度下的滑動摩擦因數(shù),為光纜密度,為光纜長度,為重力加速度。
28、在一種可選的實(shí)施方式中,所述對所有所述擬合系數(shù)進(jìn)行排序,將所述擬合系數(shù)最大的散件確定為目標(biāo)散件,包括:
29、收集所有所述擬合系數(shù),并對所述擬合系數(shù)進(jìn)行降序排序;
30、通過以下公式確定目標(biāo)散件:
31、
32、其中,t為目標(biāo)散件,為最大值選擇函數(shù),為擬合系數(shù)。
33、在一種可選的實(shí)施方式中,所述控制端根據(jù)所述控制指令將光纜從目標(biāo)散件中穿出之后,所述方法還包括:
34、根據(jù)所述擬合系數(shù),找到下個目標(biāo)散件;
35、將所述下個目標(biāo)散件傳送至控制端;
36、所述控制端根據(jù)所述下個目標(biāo)散件的穿散件理想力度與穿散件理想速度控制指令調(diào)整設(shè)備;
37、執(zhí)行光纜穿散件的操作,返回所述根據(jù)所述擬合系數(shù),找到下個目標(biāo)散件的步驟以實(shí)現(xiàn)重復(fù)執(zhí)行光纜穿散件的操作,直到穿散件任務(wù)完成。
38、第二方面,本發(fā)明提供了一種光纜自動穿散件的控制裝置,包括:
39、數(shù)據(jù)獲取模塊,用于獲取環(huán)境溫濕度數(shù)據(jù)、散件規(guī)格參數(shù)和光纜規(guī)格參數(shù),其中散件規(guī)格參數(shù)包括滑動摩擦因數(shù)和散件內(nèi)徑,光纜規(guī)格參數(shù)包括光纜直徑、光纜質(zhì)量、光纜長度和光纜密度;
40、環(huán)境判斷模塊,用于根據(jù)所述環(huán)境溫濕度數(shù)據(jù)進(jìn)行判斷,當(dāng)所述環(huán)境溫濕度數(shù)據(jù)滿足預(yù)設(shè)溫濕度條件時,則判定繼續(xù)執(zhí)行光纜穿散件操作;
41、力度獲取模塊,用于根據(jù)所述散件規(guī)格參數(shù)和光纜規(guī)格參數(shù)進(jìn)行計算,得到摩擦力,并根據(jù)所述摩擦力和預(yù)設(shè)的拉力系數(shù)得到穿散件理想力度,其中所述穿散件理想力度是全部未穿散件的理想力度;
42、速度獲取模塊,用于根據(jù)所述散件規(guī)格參數(shù)、所述光纜規(guī)格參數(shù)和所述穿散件理想力度進(jìn)行計算,得到穿散件理想速度,其中所述穿散件理想速度是全部未穿散件的理想速度;
43、擬合匹配模塊,用于根據(jù)所述穿散件理想速度和所述穿散件理想力度進(jìn)行計算,得到所有未穿散件的擬合系數(shù);
44、排序模塊,用于對所有所述擬合系數(shù)進(jìn)行排序,將所述擬合系數(shù)最大的散件確定為目標(biāo)散件;
45、穿散件執(zhí)行模塊,用于根據(jù)與所述目標(biāo)散件對應(yīng)的所述穿散件理想速度和所述穿散件理想力度生成控制指令并發(fā)送到控制端,所述控制端根據(jù)所述控制指令將光纜從所述目標(biāo)散件中穿出。
46、第三方面,本發(fā)明還提供了一種電子設(shè)備,包括處理器、存儲器以及存儲在所述存儲器中且被配置為由所述處理器執(zhí)行的計算機(jī)程序,所述處理器執(zhí)行所述計算機(jī)程序時實(shí)現(xiàn)上述中任意一項(xiàng)所述的光纜自動穿散件的控制方法。
47、第四方面,本發(fā)明還提供了一種計算機(jī)可讀存儲介質(zhì),所述計算機(jī)可讀存儲介質(zhì)包括存儲的計算機(jī)程序,其中,在所述計算機(jī)程序運(yùn)行時控制所述計算機(jī)可讀存儲介質(zhì)所在設(shè)備執(zhí)行上述中任意一項(xiàng)所述的光纜自動穿散件的控制方法。
48、相比于現(xiàn)有技術(shù),本發(fā)明具有如下有益效果:
49、本發(fā)明公開了一種光纜自動穿散件的控制方法,包括:獲取環(huán)境溫濕度數(shù)據(jù)、散件規(guī)格參數(shù)和光纜規(guī)格參數(shù),其中散件規(guī)格參數(shù)包括滑動摩擦因數(shù)和散件內(nèi)徑,光纜規(guī)格參數(shù)包括光纜直徑、光纜質(zhì)量、光纜長度和光纜密度;根據(jù)所述環(huán)境溫濕度數(shù)據(jù)進(jìn)行判斷,當(dāng)所述環(huán)境溫濕度數(shù)據(jù)滿足預(yù)設(shè)溫濕度條件時,則判定繼續(xù)執(zhí)行光纜穿散件操作;根據(jù)所述散件規(guī)格參數(shù)和光纜規(guī)格參數(shù)進(jìn)行計算,得到摩擦力,并根據(jù)所述摩擦力和預(yù)設(shè)的拉力系數(shù)得到穿散件理想力度,其中所述穿散件理想力度是全部未穿散件的理想力度;根據(jù)所述散件規(guī)格參數(shù)、所述光纜規(guī)格參數(shù)和所述穿散件理想力度進(jìn)行計算,得到穿散件理想速度,其中所述穿散件理想速度是全部未穿散件的理想速度;根據(jù)所述穿散件理想速度和所述穿散件理想力度進(jìn)行計算,得到所有未穿散件的擬合系數(shù);對所有所述擬合系數(shù)進(jìn)行排序,將所述擬合系數(shù)最大的散件確定為目標(biāo)散件;根據(jù)與所述目標(biāo)散件對應(yīng)的所述穿散件理想速度和所述穿散件理想力度生成控制指令并發(fā)送到控制端,所述控制端根據(jù)所述控制指令將光纜從所述目標(biāo)散件中穿出。
50、相對于現(xiàn)有技術(shù)在執(zhí)行完穿散件操作后,重新判斷操作環(huán)境,生產(chǎn)線停止,工人從散件盤里尋找合適的散件進(jìn)行操作來說,本發(fā)明在光纜穿散件過程前,自動判斷操作環(huán)境溫濕度情況,并且將所有待穿散件的穿散件理想力度和穿散件理想速度通過算法擬合,降序排列,在穿散件過程中只需要將待穿散件按照擬合系數(shù)降序放置在待穿區(qū),在執(zhí)行完穿散件操作后,將下一目標(biāo)散件放入穿散件裝置,減少了大量尋找合適散件時間,因此本發(fā)明能夠在光纜穿散件過程中提升穿散件效率,能夠應(yīng)用于操作環(huán)境多變,散件規(guī)格參數(shù)不一的光纜穿散件工藝。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!