基于高階全驅理論的移動機器人軌跡跟蹤控制方法、裝置及介質與流程
本發明涉及機器人運動控制領域,具體為一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法、裝置及介質。
背景技術:
1、隨著機器人產業的迅猛發展及其相關模塊的快速增長,各種各樣的機器人已被廣泛應用于軍用領域和民用領域。作為機器人產業中的一個重要分支,移動機器人的性能和技術水平也取得了顯著進步。這類機器人在執行自主巡檢、定點補給物資等任務時,需要沿著預設路徑行駛。因此,研究移動機器人系統的軌跡跟蹤問題具有重要意義。
2、軌跡跟蹤指的是移動機器人從特定的初始狀態出發,精確地跟隨一條隨時間變化的參考軌跡。受模型不確定性、傳感器噪聲以及外部擾動等因素的影響,路徑跟蹤控制器的設計具有挑戰性。為此,強化學習、滑模控制、魯棒控制以及模型預測控制(modelpredictive?control,?mpc)等技術被提出處理移動機器人的軌跡跟蹤問題。其中,mpc基于受控對象的特性建模,通過預測未來的狀態變化趨勢來進行決策,具備良好的反饋校正能力和魯棒性,從而成為解決移動機器人軌跡跟蹤問題的有效方法。
3、值得注意的是,上述大多數方法仍然使用狀態空間模型來描述網絡化控制運動系統,這導致了原始系統的物理意義丟失和模型簡化過程中病態矩陣的出現。近幾年,直接基于物理定律構建的全驅控制系統理論得到了發展,其作為傳統狀態空間模型理論的一種擴展,不僅保留了原始系統的物理意義,還防止了簡化過程中可能出現的病態矩陣問題,因此能更準確地表示實際系統。此外,它為控制器的設計提供了更為簡便的方法,有助于提升移動機器人的軌跡跟蹤精度和效率。
技術實現思路
1、本發明的目的在于提供一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法、裝置及介質,以解決上述背景技術中提出的問題。
2、為實現上述目的,本發明提供如下技術方案:
3、一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法,包括:
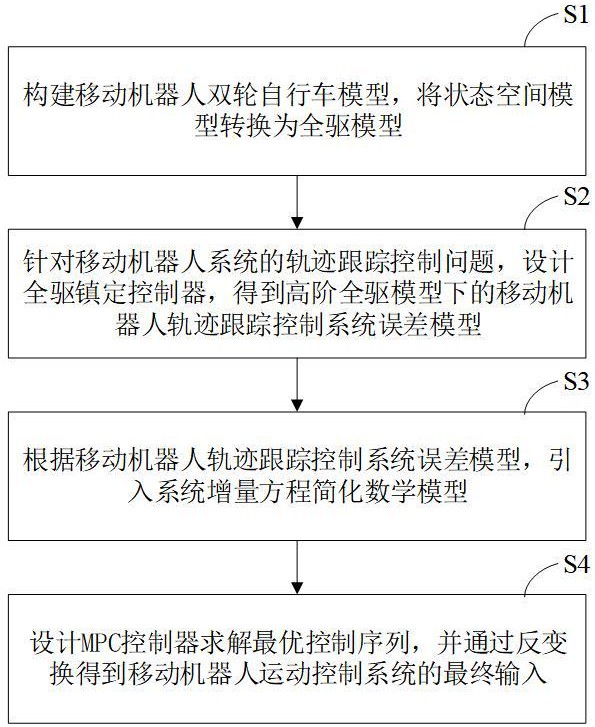
4、步驟s1、構建移動機器人雙輪自行車模型,將狀態空間模型轉換為全驅模型;
5、步驟s2、針對移動機器人雙輪自行車模型的軌跡跟蹤控制問題設計全驅鎮定控制器,得到高階全驅模型下的移動機器人軌跡跟蹤控制系統誤差模型;
6、步驟s3、根據步驟s2給出的移動機器人軌跡跟蹤控制系統誤差模型,引入系統增量方程來簡化數學模型;
7、步驟s4、設計mpc控制器求解最優控制序列,并通過反變換得到移動機器人運動控制系統的最終輸入。
8、進一步地,所述步驟s1包括:
9、移動機器人雙輪自行車模型的狀態方程如下:
10、?(1)
11、其中,分別表示移動機器人的橫坐標、縱坐標及姿態角,分別表示的一階導數,分別表示移動機器人的速度與加速度,速度方向與車身方向的夾角為,表示移動機器人的前輪與后輪之間的距離;
12、對進行二次求導:
13、?(2)
14、其中分別表示的二階導數,記中間變量,設計控制量,代入式(2)得到以下狀態空間方程:
15、?(3)
16、其中表示的二階導數,將式(3)按采樣時間進行離散化,得到離散狀態空間方程如下:
17、?(4)
18、其中,表示第個采樣時刻,分別表示第采樣時刻的值,分別表示的系數,,表示需要設計的全驅鎮定控制器。
19、進一步地,所述步驟s2包括:
20、設計全驅鎮定控制器如下:
21、?(5)
22、其中,分別表示采樣時刻的參考軌跡,和分別表示采樣時刻的跟蹤誤差,表示外部控制輸入,為所設計全驅鎮定控制器的參數矩陣;
23、將式(4)代入式(3),得到閉環形式的高階全驅跟蹤誤差控制模型如下:
24、?(6)
25、其中為階數合適的單位矩陣。
26、進一步地,所述步驟s3包括:
27、記中間變量,,則式(6)所示的高階全驅跟蹤誤差控制模型可重新表示為:
28、?(7)
29、其中,為系統參數矩陣,其中為階數合適的單位矩陣;
30、記中間變量,,,可得到式(7)的增量方程如下:
31、?(8)
32、記中間變量,,有:
33、?(9)
34、其中。
35、進一步地,所述步驟s4包括:
36、設定預測區間n=k,遞推表達式如下:
37、?(10)
38、其中分別表示在時刻的遞推;
39、定義中間變量,其中中的“”表示省略的,則可將式(10)寫成矩陣的形式:
40、??(11)
41、其中分別表示的次冪;
42、定義二次型性能指標為:
43、?(12)
44、其中,,分別表示的轉置,代表對角形式的狀態權重矩陣,代表對角形式的控制權重矩陣;
45、通過yalmip工具箱對二次型性能指標進行求解,得到最優控制序列;取序列的第一個元素作為當前時刻系統控制律,并根據和,將mpc控制器求出的反變換為,根據得到相應的控制量,實現移動機器人軌跡跟蹤預測控制。
46、本發明還提供一種基于高階全驅理論的移動機器人軌跡跟蹤預測控制裝置,包括一個或多個處理器,用于實現如上所述的一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法。
47、本發明還提供一種可讀存儲介質,其上存儲有程序,該程序被處理器執行時,實現如上所述的一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法。
48、與現有技術相比,本發明的有益效果是:
49、1)利用高階全驅理論將復雜的狀態空間模型轉換為更為簡潔的二階全驅模型,不僅保留了系統的物理意義,還避免了傳統方法中可能遇到的病態矩陣問題,從而極大地簡化了控制器的設計過程,并提高了設計效率。
50、2)通過構建誤差模型,可以更精確地捕捉移動機器人實際軌跡與期望軌跡之間的偏差,使得控制系統能夠更加準確地調整其行為,進而實現更高的軌跡跟蹤精度和控制性能。
51、3)引入系統增量方程來簡化數學模型,減少了計算量和所需的處理時間,不僅有助于提高實時響應速度,也使得算法更容易在資源受限的環境中部署。
52、4)提出了一種基于高階全驅模型的mpc方法求解最優控制律,通過相應的反變換關系式,將這些控制律轉換回適用于全驅系統的控制指令,最終實現基于高階全驅理論的移動機器人軌跡跟蹤預測控制。
技術特征:
1.一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法,其特征在于,包括:
2.根據權利要求1所述的一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法,其特征在于,所述步驟s1包括:
3.根據權利要求2所述的一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法,其特征在于,所述步驟s2包括:
4.根據權利要求2所述的一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法,其特征在于,所述步驟s3包括:
5.根據權利要求2所述的一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法,其特征在于,所述步驟s4包括:
6.一種基于高階全驅理論的移動機器人軌跡跟蹤預測控制裝置,其特征在于,包括一個或多個處理器,用于實現權利要求1-5中任一項所述的一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法。
7.一種可讀存儲介質,其特征在于,其上存儲有程序,該程序被處理器執行時,實現權利要求1-5中任一項所述的一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法。
技術總結
本發明屬于機器人運動控制領域,公開了一種基于高階全驅理論的移動機器人軌跡跟蹤控制方法、裝置及介質,包括:構建移動機器人雙輪自行車模型,將狀態空間模型轉換為全驅模型;針對移動機器人雙輪自行車模型的軌跡跟蹤控制問題設計全驅鎮定控制器,得到移動機器人軌跡跟蹤控制系統誤差模型;根據移動機器人軌跡跟蹤控制系統誤差模型,引入系統增量方程來簡化數學模型;設計MPC控制器求解最優控制序列,并通過反變換得到移動機器人運動控制系統的最終輸入。本發明利用高階全驅理論將復雜的狀態空間模型轉換為更為簡潔的二階全驅模型,不僅保留了系統的物理意義,還避免了傳統方法中可能遇到的病態矩陣問題,極大地簡化了控制器的設計過程。
技術研發人員:顧曹源,華騁遠,吳麒,張文安,王瑤為,吳祥,劉安東
受保護的技術使用者:德清縣浙工大莫干山研究院
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!