無人機自動控制系統的控制方法與流程
本發明屬于電子信息,尤其涉及一種無人機自動控制系統的控制方法。
背景技術:
1、無人駕駛飛機簡稱“無人機”,是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛機,或者由車載計算機完全地或間歇地自主地操作。目前,隨著科技的發展,無人機技術日趨成熟,無人機以其速度快、操作靈活的特點被廣泛應用。
2、無人機的飛控系統是無人機的核心控制大腦,負責整個無人機飛行過程的控制,一旦出現故障將導致墜機或產生非常嚴重的后果。因此非常有必要對無人機的飛控系統進行冗余備份,常規的備份分為雙冗余熱備份,這種備份機制速度較慢,穩定性不夠好等缺陷。
技術實現思路
1、本發明提供了一種無人機自動控制系統的控制方法,可以有效解決上述問題。
2、本發明是這樣實現的:
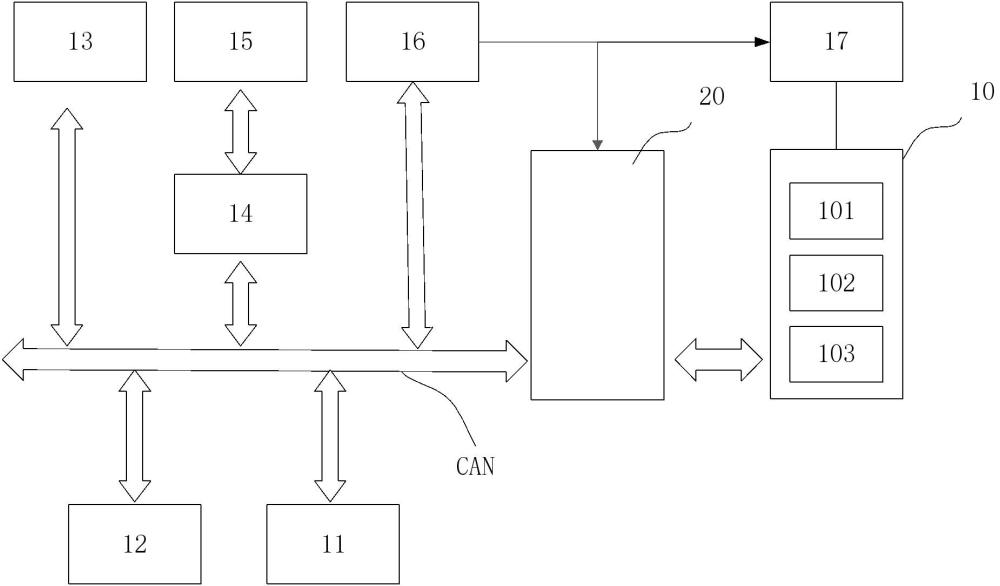
3、本發明提供一種無人機自動控制系統的控制方法,所述無人機自動控制系統包括:飛控單元,其包括第1飛控模塊、第2飛控模塊...以及第n飛控模塊;飛控仲裁總控設備,其分別與每一飛控模塊連接;?can?總線與飛控仲裁總控設備連接;與can?總線連接的can轉?pwm/spi/iic/uart模塊;電調模塊,與所述can?轉?pwm/spi/iic/uart模塊上的pwm接口連接;與電調模塊連接的舵機模塊;
4、所述控制方法包括:
5、s1,每一飛控模塊分別解算出其對應的電調以及舵機數據,通過所述can總線發到所述飛控仲裁總控設備,所述飛控仲裁總控設備通過仲裁算法,挑選飛控模塊中的一個數據進行實際輸出。
6、作為進一步改進的,在步驟s1中,所述每一飛控模塊分別解算出其對應的電調以及舵機數據,通過所述can總線發到所述飛控仲裁總控設備,所述飛控仲裁總控設備通過仲裁算法,挑選飛控模塊中的一個數據進行實際輸出具體包括:
7、s11,定義每一飛控模塊的電調為e1f1、e1f2...e1fn,n為電調的數量,然后進行首次求和σe1f1+e1f2+.....+e1fn以及首次求和的平均值△ea=σe1f1+e1f2+.....+e1fn/n;
8、s12,逐個判斷實際誤差值in=?100*(e1f1-△ea)/△ea,當in落在誤差閾值為±ith(%)范圍內的為合格數據,ith為設定的誤差閾值;
9、s13,取出合格數據進行二次求和及二次平均值計算;
10、s14,然后進行第二輪誤差計算,將第二輪的in絕對值最小的飛控數據作為無人機最終數據輸出。
11、作為進一步改進的,每一飛控模塊都包括氣壓計、陀螺儀、加速度計、磁力計;且所述控制方法還包括:
12、s31,在飛行過程中,通過can?總線獲取每一飛控模塊中的飛控數據,所述飛控數據包括氣壓計數據、陀螺儀數據、加速度計數據以及磁力計數據;
13、s32,定時對每一飛控模塊中的飛控數據進行投票篩選,如果投票結果中存在飛控數據不合格,則將該飛控模塊標記為故障態;
14、s33,判斷所述故障態所對應的飛控模塊是否為運行態飛控,是則迅速切換無故障飛控模塊到運行態,接管無人機控制,并觸發智能降落模式,中止飛行任務返回home點檢修。
15、作為進一步改進的,在步驟s33之后還包括:
16、s34,當至少一個飛控模塊為待機態時,繼續飛行任務,否則觸發智能降落模式,中止飛行任務返回home點檢修。
17、作為進一步改進的,在步驟s32中,所述定時對每一飛控模塊中的飛控數據進行投票篩選,如果投票結果中存在飛控數據不合格,則將該飛控模塊標記為故障態具體包括:
18、s321,定義每一飛控模塊中的飛控數據如下:
19、,其中,d1,d2,d3分別為第1飛控模塊、第2飛控模塊以及第3飛控模塊的飛控數據,且dj1,dj2,dj3,dj4分別代表氣壓計數據、陀螺儀數據、加速度計數據、磁力計數據;
20、s322,通過公式計算飛控數據的差異性:
21、;
22、s323,當差異性δdj超過預設的第一閾值時,系統判斷傳感器數據存在異常,觸發投票篩選機制,否則結束;
23、s324,投票篩選機制如下:
24、,當δij大于第二閾值時,則判斷i飛控模塊的j傳感器數據dij異常;否則結束。
25、作為進一步改進的,每一飛控模塊都包括氣壓計;且所述控制方法還包括:
26、s41,通過氣壓計獲取飛行過程中的實時風速vw;
27、s42,建立無人機速度的數學模型如下:
28、,其中,u為電機的轉速,v為無人機的瞬時速度,k1、k2和?k3為模型參數;
29、s43,引入pid控制律,使得無人機的瞬時速度?v?跟蹤期望值?vd:
30、,其中,kp為比例增益,ki為積分增益,以及kd為微分增益;
31、s44,將上述pid控制律引入,最終獲得控制模型如下:
32、。
33、作為進一步改進的,所述通過氣壓計獲取飛行過程中的實時風速vw具體包括:通過間隔設置的三個氣壓計獲取無人機的氣壓梯度,并通過所述氣壓梯度估算實時風速vw。
34、作為進一步改進的,所述通過間隔設置的三個氣壓計獲取無人機的氣壓梯度,并通過所述氣壓梯度估算實時風速vw具體包括:
35、根據流體力學模型,風速v風滿足:,其中,k風是比例常數;
36、實時獲取三個不同氣壓計的氣壓?p1,p2,p3;
37、根據公式獲取所述氣壓梯度:
38、,其中δp為兩個氣壓計之間的氣壓,δx為兩個氣壓計之間的距離。
39、本發明的有益效果是:
40、本發明提供的無人機自動控制檢測系統的控制方法,本方案提出多飛控冗余技術,通過飛控仲裁總控設備管理n個飛控模塊,各飛控模塊都可以獨立運行,由仲裁總控裝置決定無人機的電調舵機,能夠有效地避免或減少了因飛控系統故障導致的無人機失控現象的產生,有效的保障了無人機的飛行安全,改變了常規的飛控穩定性差等缺陷,解決無人機飛控系統的應急備份問題。進一步的,本發明還可以解決固定翼無人機采用油機發動機時振動極大,個別飛控模塊的傳感器會因為共振等因素數據不準,單個飛控需要在減震方面下很多成本,多飛控方案可以解決這個問題。
技術特征:
1.一種無人機自動控制系統的控制方法,其特征在于,所述無人機自動控制系統包括:飛控單元,其包括第1飛控模塊、第2飛控模塊...以及第n飛控模塊;飛控仲裁總控設備,其分別與每一飛控模塊連接;?can?總線與飛控仲裁總控設備連接;與can?總線連接的can?轉pwm/spi/iic/uart模塊;電調模塊,與所述can?轉?pwm/spi/iic/uart模塊上的pwm接口連接;與電調模塊連接的舵機模塊;
2.如權利要求1所述的無人機自動控制系統的控制方法,其特征在于,在步驟s1中,所述每一飛控模塊分別解算出其對應的電調以及舵機數據,通過所述can總線發到所述飛控仲裁總控設備,所述飛控仲裁總控設備通過仲裁算法,挑選飛控模塊中的一個數據進行實際輸出具體包括:
3.如權利要求2所述的無人機自動控制系統的控制方法,其特征在于,每一飛控模塊都包括氣壓計、陀螺儀、加速度計、磁力計;且所述控制方法還包括:
4.如權利要求3所述的無人機自動控制系統的控制方法,其特征在于,在步驟s33之后還包括:
5.如權利要求3所述的無人機自動控制系統的控制方法,其特征在于,在步驟s32中,所述定時對每一飛控模塊中的飛控數據進行投票篩選,如果投票結果中存在飛控數據不合格,則將該飛控模塊標記為故障態具體包括:
6.如權利要求1所述的無人機自動控制系統的控制方法,其特征在于,每一飛控模塊都包括氣壓計;且所述控制方法還包括:
7.如權利要求6所述的無人機自動控制系統的控制方法,其特征在于,所述通過氣壓計獲取飛行過程中的實時風速vw具體包括:通過間隔設置的三個氣壓計獲取無人機的氣壓梯度?,并通過所述氣壓梯度?估算實時風速vw。
8.如權利要求7所述的無人機自動控制系統的控制方法,其特征在于,所述通過間隔設置的三個氣壓計獲取無人機的氣壓梯度?,并通過所述氣壓梯度?估算實時風速vw具體包括:
技術總結
本發明提供了一種無人機自動控制系統的控制方法。所述控制系統包括:所述無人機自動控制系統包括:飛控單元,其包括第1飛控模塊、第2飛控模塊...以及第n飛控模塊;飛控仲裁總控設備,其分別與每一飛控模塊連接;CAN總線與飛控仲裁總控設備連接;與CAN總線連接的CAN轉PWM/SPI/IIC/UART模塊;電調模塊,與所述CAN轉PWM/SPI/IIC/UART模塊上的PWM接口連接;與電調模塊連接的舵機模塊.所述控制方法包括:S1,每一飛控模塊分別解算出其對應的電調以及舵機數據,通過所述CAN總線發到所述飛控仲裁總控設備,所述飛控仲裁總控設備通過仲裁算法,挑選飛控模塊中的一個數據進行實際輸出。
技術研發人員:黃興智,朱磊,郝秋衡
受保護的技術使用者:廈門云輪智能科技有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!