一種結合船舶行為和環境因素的船舶軌跡預測方法與流程
本發明屬于船舶軌跡預測,具體涉及一種結合船舶行為和環境因素的船舶軌跡預測方法。
背景技術:
1、隨著船舶交通的日益繁忙,對船舶軌跡預測的準確性要求也越來越高。然而,傳統方法在數據質量和模型復雜性方面存在顯著限制。例如,模擬方法依賴于精確的物理模型和參數,但實際海洋環境復雜多變,難以準確模擬所有因素,特別是顯著的時間間隔不確定性,導致預測結果存在較大偏差。統計方法基于相似性搜索和貝葉斯推理,雖然能夠處理一定程度的噪聲和不確定性,但數據質量和數量直接影響預測精度。此外,統計模型通常較為簡單,難以捕捉船舶運動的復雜動態特性。基于知識的方法需要對知識進行提取、存儲和檢索,知識庫的構建和維護成本較高。同時,知識庫的更新速度可能無法跟上船舶交通和海洋環境的變化。而機器學習模型,尤其是深度學習模型,需要大量的標注數據進行訓練。數據標注過程耗時且成本高昂,限制了模型的廣泛應用。現有的機器學習模型對船舶動態特性的學習能力較弱,難以捕捉到船舶在不同環境和條件下的復雜運動模式。機器學習模型的預測結果容易受到提前設置的參數影響,參數的調整需要大量的實驗和經驗積累。并且基于深度學習的方法也存在以下局限性。深度學習模型難以有效地擬合復雜的環境變化和不確定性因素,如海洋天氣、水流、潮汐等,導致預測精度受限。深度學習模型通常具有較高的時間復雜度,運行時間較長,難以滿足實時預測的需求。深度學習模型對硬件設備要求較高,包括計算能力和存儲空間。低配硬件會導致模型學習效率低下,影響預測效果。
2、綜上所述,現有技術缺陷表明了在船舶軌跡預測領域,仍需進一步研究和開發更先進的技術和方法,以提高船舶軌跡預測的準確性和實用性。
技術實現思路
1、(一)發明目的
2、本發明的目的是提供一種結合船舶行為和環境因素的船舶軌跡預測方法,旨在解決當前船舶軌跡預測中存在的準確性和可靠性不足的問題,特別是在深遠海風電場附近復雜環境因素的影響下,能夠提升軌跡預測的準確性。
3、(二)技術方案
4、為解決上述問題,本發明提供了一種結合船舶行為和環境因素的船舶軌跡預測方法,包括:
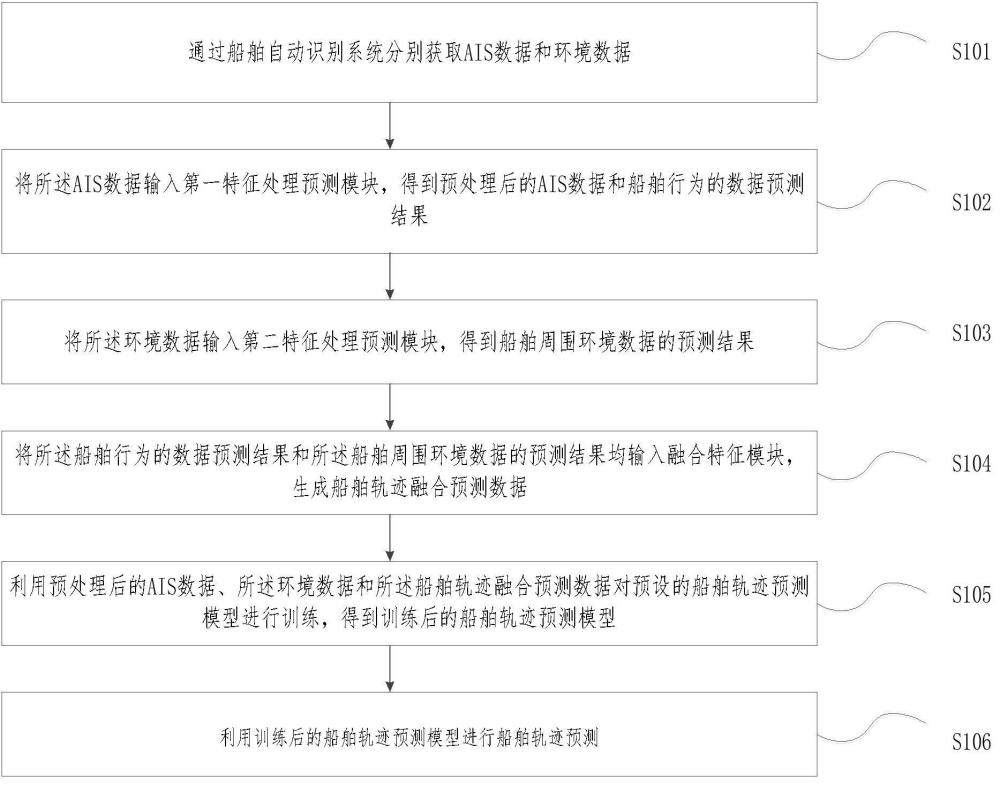
5、通過船舶自動識別系統分別獲取ais數據和環境數據;
6、將所述ais數據輸入第一特征處理預測模塊,得到預處理后的ais數據和船舶行為的數據預測結果;
7、將所述環境數據輸入第二特征處理預測模塊,得到船舶周圍環境數據的預測結果;
8、將所述船舶行為的數據預測結果和所述船舶周圍環境數據的預測結果均輸入融合特征模塊,生成船舶軌跡融合預測數據;
9、利用預處理后的ais數據、所述環境數據和所述船舶軌跡融合預測數據對預設的船舶軌跡預測模型進行訓練,得到訓練后的船舶軌跡預測模型,其中,所述預設的船舶軌跡預測模型包括第一特征處理預測模塊、第二特征處理預測模塊和融合特征模塊;
10、利用訓練后的船舶軌跡預測模型進行船舶軌跡預測。
11、進一步地,所述第一特征處理預測模塊包括依次連接的ais數據預處理模塊、船舶行為聚類模塊、基于bigru的船舶行為特征提取模塊和第一全連接層。
12、進一步地,所述將所述ais數據輸入第一特征處理預測模塊,得到船舶行為的數據預測結果,包括如下步驟:
13、通過所述ais數據預處理模塊對所述ais數據進行預處理,得到預處理后的ais數據;
14、將預處理后的ais數據輸入所述船舶行為聚類模塊,得到船舶行為的聚類結果;
15、采用所述基于bigru的船舶行為特征提取模塊,對所述船舶行為的聚類結果進行特征提取,得到船舶行為特征;
16、利用所述第一全連接層對所述船舶行為特征進行歸一化處理,得到船舶行為的數據預測結果。
17、進一步地,所述將預處理后的ais數據輸入所述船舶行為聚類模塊,得到船舶行為的聚類結果,包括:
18、從預處理后的ais數據中提取船舶軌跡集;
19、遍歷所述船舶軌跡集并判定是否需要處理,得到符合要求的船舶軌跡數據;
20、通過dp壓縮算法對所述船舶軌跡數據進行壓縮;
21、壓縮完成后根據豪斯多夫距離計算豪斯多夫相似性矩陣;
22、采用hdbscan聚類方法對豪斯多夫相似性矩陣進行聚類分析,得到最優的聚類結果;
23、基于最優的聚類結果,根據綜合聚類性能指標篩選得到船舶行為的聚類結果。
24、進一步地,所述hdbscan聚類方法處理過程如下:
25、根據所述豪斯多夫相似性矩陣建立最小生成樹和聚類層次結構,
26、遍歷并壓縮聚類層次結構,得到多個聚類結果;
27、從多個所述聚類結果中篩選穩定性最優的聚類結果;
28、進一步地,所述采用所述基于bigru的船舶行為特征提取模塊,對所述船舶行為的聚類結果進行特征提取,得到船舶行為特征,包括以下步驟:
29、將所述船舶行為的聚類結果輸入編碼器分別進行前向運算和后向運算,分別得到編碼器輸出的前向特征信息和后向特征信息;
30、將所述前向特征信息和所述后向特征信息通過softmax激活函數處理后,得到船舶行為特征;所述基于bigru的船舶行為特征提取模塊包括編碼器和解碼器,所述解碼器用于接收所述船舶行為特征。
31、進一步地,所述前向特征信息的計算公式為:
32、前向特征信息gru:;
33、式中,下標f表示前向,為在t時刻的前向隱藏狀態,為激活函數,為輸入到隱藏狀態的前向權重矩陣,為輸入,為隱藏狀態到隱藏狀態的前向權重矩陣,為在t-1時刻的前向隱藏狀態,為前向偏置矩陣。
34、進一步地,所述后向特征信息的計算公式為:
35、后向特征信息gru:;
36、式中,下標b表示后向,為在t時刻的后向隱藏狀態,為輸入到隱藏狀態的后向權重矩陣,為隱藏狀態到隱藏狀態的后向權重矩陣,為在t+1時刻的后向隱藏狀態,為后向偏置矩陣。
37、進一步地,所述船舶行為特征的計算公式為:
38、;
39、式中,為t時刻的船舶行為特征,為t時刻的權重矩陣,為t時刻的權重矩陣,為t時刻的向偏置矩陣。
40、進一步地,所述將所述環境數據輸入第二特征處理預測模塊,得到船舶周圍環境數據的預測結果,包括:
41、將所述環境數據和所述ais數據進行關聯,形成多模態數據;
42、通過環境因素特征提取模塊對關聯后的多模態數據進行環境因素特征提取;
43、將提取后的環境因素特征輸入第二全連接層,得到船舶周圍環境數據的預測結果。
44、進一步地,所述利用預處理后的ais數據、所述環境數據和所述船舶軌跡融合預測數據對預設的船舶軌跡預測模型進行訓練,得到訓練后的船舶軌跡預測模型,包括:
45、將預處理后的ais數據和船舶軌跡融合預測數據輸入到所述基于bigru的船舶行為特征提取模塊、將環境數據和船舶軌跡融合預測數據輸入到所述環境因素特征提取模塊分別進行訓練,得到訓練后的船舶軌跡預測模型。
46、(三)有益效果
47、本發明提供了一種結合船舶行為和環境因素的船舶軌跡預測方法,該方法考慮到了深遠海風電場環境的強季風等特性對船舶軌跡的影響,因此結合船舶行為特征和深遠海風電場環境特征進行船舶軌跡預測,先是通過船舶自動識別系統分別獲取ais數據和環境數據,設計了兩個特征處理預測模塊分別提取ais數據和環境數據的特征,最后通過一個融合特征模塊,生成船舶軌跡融合預測數據,再將預處理后的ais數據、環境數據和船舶軌跡融合預測數據對預設的船舶軌跡預測模型進行訓練,得到訓練后的船舶軌跡預測模型,最后通過訓練后的船舶軌跡預測模型進行船舶軌跡預測。本發明旨在通過綜合分析船舶的行為特征和海洋環境這些復雜因素,建立一個更為精準的船舶軌跡預測模型,有效提高船舶軌跡預測的準確性和可靠性。本發明能夠處理高維度、非線性數據;具有強大的學習能力,能夠捕捉船舶運動的復雜動態特性;具有較低的模型復雜度和運行時間成本;能夠適應復雜多變的海洋環境。
- 還沒有人留言評論。精彩留言會獲得點贊!