一種氣墊船墊升控制方法、裝置、設備及存儲介質
本公開涉及數據控制領域,尤其涉及一種氣墊船墊升控制方法、裝置、設備及存儲介質。
背景技術:
1、全墊升氣墊船是一種兩棲型船舶,其能夠在陸地、淺灘和水面等各種地形下實現自主墊升。氣墊船的墊升系統是實現氣墊船獨特兩棲特性的關鍵要素,也是氣墊船實現自主航行的前提和基礎。然而,墊升系統所產生的氣墊極易受到地形環境的影響。在惡劣海況下,波浪與起伏水面所引起的波浪泵氣運動和圍裙泄流量的變化會顯著影響氣墊壓力。這種影響導致氣墊船遭受劇烈的升沉運動,使船舶的不穩定性增加。
技術實現思路
1、本公開提供了一種氣墊船墊升控制方法、裝置、設備及存儲介質,以至少解決現有技術中存在的以上技術問題。
2、根據本公開的第一方面,提供了一種氣墊船墊升控制方法,包括:
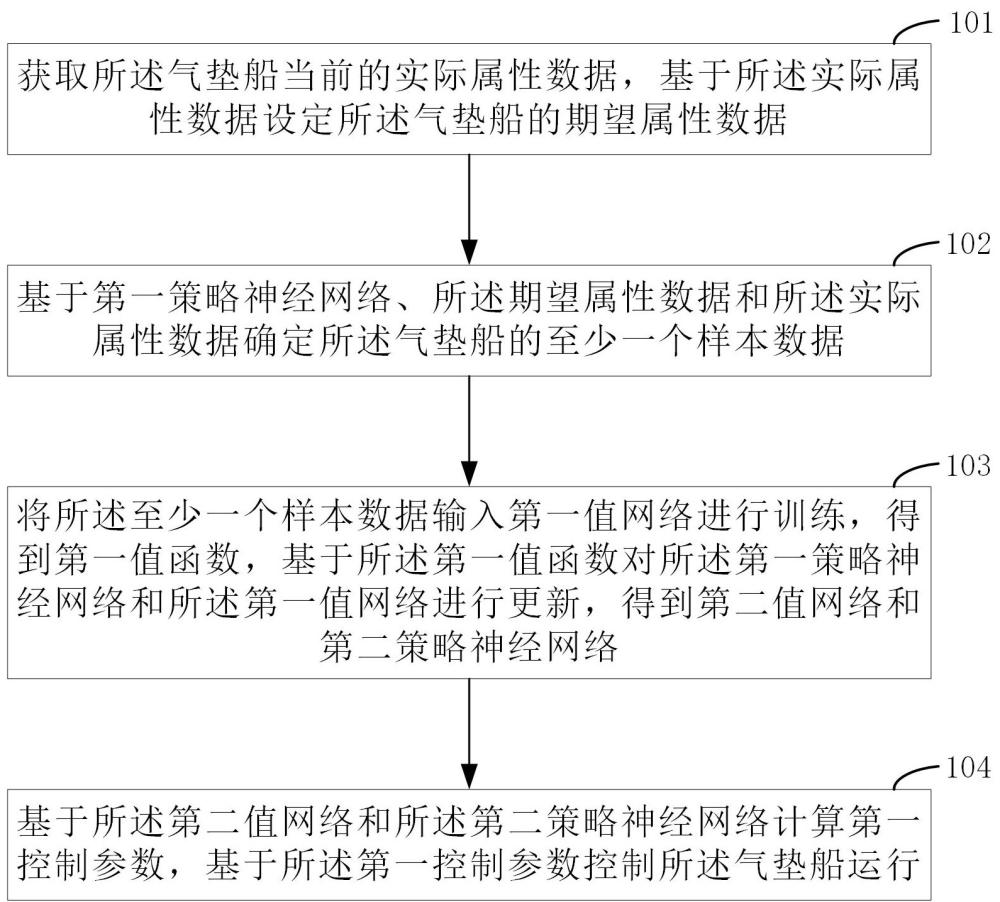
3、獲取所述氣墊船當前的實際屬性數據,基于所述實際屬性數據設定所述氣墊船的期望屬性數據;
4、基于第一策略神經網絡、所述期望屬性數據和所述實際屬性數據確定所述氣墊船的至少一個樣本數據;
5、將所述至少一個樣本數據輸入第一值網絡進行訓練,得到第一值函數,基于所述第一值函數對所述第一策略神經網絡和所述第一值網絡進行更新,得到第二值網絡和第二策略神經網絡;
6、基于所述第二值網絡和所述第二策略神經網絡計算第一控制參數,基于所述第一控制參數控制所述氣墊船運行。
7、在一可實施方式中,所述基于第一策略神經網絡、所述期望屬性數據和所述實際屬性數據確定所述氣墊船的至少一個樣本數據,包括:
8、基于所述期望屬性數據和所述實際屬性數據計算所述氣墊船當前時刻的誤差數據,基于所述誤差數據確定所述氣墊船當前的初始化狀態數據;
9、基于所述第一策略神經網絡確定所述氣墊船的第一動作數據,將所述第一動作數據輸入第一控制算法中,確定所述氣墊船的下一時刻狀態數據;
10、基于所述誤差數據構建所述氣墊船的獎勵函數,基于所述獎勵函數、所述初始化狀態數據、所述下一時刻狀態數據和所述第一動作數據確定第一樣本數據。
11、在一可實施方式中,所述基于所述期望屬性數據和所述實際屬性數據計算所述氣墊船當前時刻的誤差數據,基于所述誤差數據確定所述氣墊船當前的初始化狀態數據,包括:
12、獲取上一時刻的實際屬性數據,基于所述上一時刻的實際屬性數據和所述當前的實際屬性數據,計算所述氣墊船的誤差變化率數據;
13、基于所述期望屬性數據和所述實際屬性數據計算所述氣墊船的誤差向量數據;
14、基于所述誤差向量數據和所述誤差變化率數據確定所述氣墊船當前的初始化狀態數據。
15、在一可實施方式中,所述基于所述第一值函數對所述第一策略神經網絡和所述第一值網絡進行更新,包括:
16、分別獲取所述第一策略神經網絡和所述第一值網絡的初始化網絡參數;
17、基于所述第一值函數對所述初始化網絡參數進行更新,得到所述第一策略神經網絡和所述第一值網絡對應的當前網絡參數;
18、基于所述初始化網絡參數和所述當前網絡參數確定價值網絡參數,基于所述價值網絡參數對所述第一策略神經網絡和所述第一值網絡更新。
19、在一可實施方式中,所述基于所述誤差數據構建所述氣墊船的獎勵函數,包括:
20、基于所述誤差向量數據確定誤差獎勵函數,基于所述誤差變化率數據確定誤差變化率獎勵函數;
21、設定第一權重系數和第二權重系數,基于所述第一權重系數、所述第二權重系數、所述誤差獎勵函數和所述誤差變化率獎勵函數構建所述氣墊船的獎勵函數。
22、根據本公開的第二方面,提供了一種氣墊船墊升控制裝置,所述裝置包括:
23、數據獲取單元,用于獲取所述氣墊船當前的實際屬性數據,基于所述實際屬性數據設定所述氣墊船的期望屬性數據;
24、樣本數據計算單元,用于基于第一策略神經網絡、所述期望屬性數據和所述實際屬性數據確定所述氣墊船的至少一個樣本數據;
25、神經網絡更新單元,用于將所述至少一個樣本數據輸入第一值網絡進行訓練,得到第一值函數,基于所述第一值函數對所述第一策略神經網絡和所述第一值網絡進行更新,得到第二值網絡和第二策略神經網絡;
26、控制參數計算單元,用于基于所述第二值網絡和所述第二策略神經網絡計算第一控制參數,基于所述第一控制參數控制所述氣墊船運行。
27、在一可實施方式中,所述樣本數據計算單元還用于,基于所述期望屬性數據和所述實際屬性數據計算所述氣墊船當前時刻的誤差數據,基于所述誤差數據確定所述氣墊船當前的初始化狀態數據;基于所述第一策略神經網絡確定所述氣墊船的第一動作數據,將所述第一動作數據輸入第一控制算法中,確定所述氣墊船的下一時刻狀態數據;基于所述誤差數據構建所述氣墊船的獎勵函數,基于所述獎勵函數、所述初始化狀態數據、所述下一時刻狀態數據和所述第一動作數據確定第一樣本數據;
28、所述神經網絡更新單元還用于,分別獲取所述第一策略神經網絡和所述第一值網絡的初始化網絡參數;基于所述第一值函數對所述初始化網絡參數進行更新,得到所述第一策略神經網絡和所述第一值網絡對應的當前網絡參數;基于所述初始化網絡參數和所述當前網絡參數確定價值網絡參數,基于所述價值網絡參數對所述第一策略神經網絡和所述第一值網絡更新。
29、在一可實施方式中,所述樣本數據計算單元還用于,獲取上一時刻的實際屬性數據,基于所述上一時刻的實際屬性數據和所述當前的實際屬性數據,計算所述氣墊船的誤差變化率數據;基于所述期望屬性數據和所述實際屬性數據計算所述氣墊船的誤差向量數據;基于所述誤差向量數據和所述誤差變化率數據確定所述氣墊船當前的初始化狀態數據;
30、基于所述誤差向量數據確定誤差獎勵函數,基于所述誤差變化率數據確定誤差變化率獎勵函數;設定第一權重系數和第二權重系數,基于所述第一權重系數、所述第二權重系數、所述誤差獎勵函數和所述誤差變化率獎勵函數構建所述氣墊船的獎勵函數。
31、根據本公開的第三方面,提供了一種電子設備,包括:
32、至少一個處理器;以及
33、與所述至少一個處理器通信連接的存儲器;其中,
34、所述存儲器存儲有可被所述至少一個處理器執行的指令,所述指令被所述至少一個處理器執行,以使所述至少一個處理器能夠執行本公開所述的方法。
35、根據本公開的第四方面,提供了一種存儲有計算機指令的非瞬時計算機可讀存儲介質,所述計算機指令用于使所述計算機執行本公開所述的方法。
36、本公開的氣墊船墊升控制方法、裝置、設備及存儲介質,通過氣墊船的實際屬性數據和期望屬性數據構建氣墊船對應的樣本數據,并將樣本數據作為第一策略神經網絡和第一值網絡的訓練樣本,更新網絡參數,基于更新網絡參數后的神經網絡計算氣墊船的控制參數,可以提升氣墊船的智能性和自主性,使得氣墊船能夠更好地適應各種環境和任務要求。
37、應當理解,本部分所描述的內容并非旨在標識本公開的實施例的關鍵或重要特征,也不用于限制本公開的范圍。本公開的其它特征將通過以下的說明書而變得容易理解。
- 還沒有人留言評論。精彩留言會獲得點贊!