一種基于實時空間定位的帶電作業(yè)監(jiān)護方法與流程
本發(fā)明涉及輸電線路作業(yè)裝置,尤其是指一種基于實時空間定位的帶電作業(yè)監(jiān)護方法。
背景技術(shù):
1、帶電作業(yè)中的等電位作業(yè)法,是指作業(yè)人員處于與帶電體同電位的電位狀態(tài),穿戴屏蔽用具進行帶電作業(yè)。但在人體進入等電位的過程中,將出現(xiàn)短時的暫態(tài)過程,該過程將出現(xiàn)較大的暫態(tài)電流。因此,等電位作業(yè)時,作業(yè)人員進入和脫離等電位應(yīng)該動作迅速,作業(yè)過程人體應(yīng)時刻與帶電體保持等電位。
2、由于帶電作業(yè)存在極高的危險性,作業(yè)期間需要多人配合完成電網(wǎng)消缺。一般在地面和塔上設(shè)有安全監(jiān)管人員專職負責(zé)高空作業(yè)過程的安全監(jiān)護。監(jiān)護過程以目視為主,受角度、距離、天氣條件等客觀因素限制,視線容易產(chǎn)生偏差、盲區(qū)或被遮擋。近幾年,通過塔上固定安裝的監(jiān)控攝像頭實時監(jiān)護的方式得到廣泛應(yīng)用,相較于人工監(jiān)視,通過攝像頭監(jiān)護的方式精度更高,可持續(xù)時間更長。然而,由于攝像頭的安裝條件及位置限制,畫面遮擋的問題依然存在,且視頻回傳的質(zhì)量好壞和延遲高低受網(wǎng)絡(luò)環(huán)境影響經(jīng)常出現(xiàn)波動,也無法保證帶電作業(yè)監(jiān)護的及時性和有效性。
技術(shù)實現(xiàn)思路
1、本發(fā)明的目的是克服現(xiàn)有技術(shù)中對于帶電作業(yè)的監(jiān)護無法保證及時性和有效性,導(dǎo)致作業(yè)人員作業(yè)安全性降低的缺點,提供一種基于實時空間定位的帶電作業(yè)監(jiān)護方法。
2、本發(fā)明的目的是通過下述技術(shù)方案予以實現(xiàn):
3、一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,包括以下步驟:
4、步驟1,無人機采集高空作業(yè)的實時視頻圖像信息;
5、步驟2,提取視頻圖像信息中的特征信息,特征信息包括作業(yè)人員和電力設(shè)備的位置信息,以電力設(shè)備的位置作為參照物,確定作業(yè)人員所處的實際空間位置;
6、步驟3,選擇平行于電力消缺對象所在垂直面的視頻圖像信息作為測算安全距離的監(jiān)測面;步驟4,根據(jù)電力設(shè)備的真實尺寸及監(jiān)測面中電力設(shè)備的像素尺寸之間的比值,推算出監(jiān)測面中帶電作業(yè)人員與接地體、帶電體之間的真實距離,根據(jù)帶電作業(yè)人員與接地體、帶電體之間的真實距離計算組合間隙值;
7、步驟5,將計算得出的組合間隙值與作業(yè)規(guī)范值比較,若組合間隙值大于等于作業(yè)規(guī)范值,則判斷當(dāng)前帶電作業(yè)安全,若組合間隙值小于作業(yè)規(guī)范值,則判斷為帶電作業(yè)危險。
8、作為優(yōu)選,所述的步驟2中,提取視頻圖像信息中的特征信息為通過經(jīng)過訓(xùn)練的深度學(xué)習(xí)模型提取特征信息,對作業(yè)人員和電力設(shè)備進行自動識別并跟蹤。
9、作為優(yōu)選,所述的深度學(xué)習(xí)模型為卷積神經(jīng)網(wǎng)絡(luò)圖像識別模型,對于卷積神經(jīng)網(wǎng)絡(luò)圖像識別模型進行訓(xùn)練的過程為:
10、步驟2a,初始化卷積核、權(quán)重矩陣和偏置向量;
11、步驟2b,選擇交叉熵損失函數(shù)或均方誤差損失函數(shù)并通過隨機梯度下降方法最小化損失函數(shù);步驟2c,將歷史視頻圖像輸入卷積神經(jīng)網(wǎng)絡(luò)圖像識別模型進行訓(xùn)練,使用反向傳播算法更新模型參數(shù);
12、步驟2d,使用驗證集評估模型的識別準(zhǔn)確率和泛化能力。
13、作為優(yōu)選,所述的步驟2c中,所述的歷史視頻圖像為經(jīng)過預(yù)處理后的圖像,所述的預(yù)處理的過程為:
14、獲取歷史視頻圖像的拍攝時間,并將歷史視頻圖像按照拍攝時間進行分類,分類的條件為拍攝的日期以及拍攝的時間;將相似的拍攝日期或相似的拍攝的時間歸為一類,然后將該類的歷史視頻圖像進行去噪處理;
15、歷史視頻圖像進行去噪后,將該類歷史視頻圖像對卷積神經(jīng)網(wǎng)絡(luò)圖像識別模型進行訓(xùn)練,訓(xùn)練完成的模型用于處理該類歷史視頻圖像。
16、作為優(yōu)選,在步驟1中,還將實時視頻圖像與歷史視頻圖像進行比較,在歷史視頻圖像中尋找與實時視頻圖像最相似歷史視頻圖像,獲取該歷史視頻圖像對應(yīng)的分類類別,運用該分類類別對應(yīng)的卷積神經(jīng)網(wǎng)絡(luò)圖像識別模型對于實時視頻圖像進行識別。
17、作為優(yōu)選,所述的組合間隙值為人與帶電體最短直線距離加人與接地體最短直線距離之和。
18、作為優(yōu)選,所述的步驟4具體為:
19、設(shè)電力設(shè)備的像素長度為n個像素,帶電作業(yè)人員距離帶電體的最小像素距離為nd,對應(yīng)實際距離為ld;帶電作業(yè)人員距離接地體的最小像素距離為nj,對應(yīng)實際距離為lj,
20、根據(jù)根據(jù)可得出
21、故組合間隙值d為:d=ld+lj。
22、作為優(yōu)選,基于實時空間定位的帶電作業(yè)監(jiān)護方法還采集高空作業(yè)的氣象條件信息,氣象條件信息包括風(fēng)速、溫度和濕度。
23、作為優(yōu)選,在對歷史視頻圖像進行分類時,還按氣象條件進行分類,將有相似氣象條件和相似拍攝日期的歷史視頻圖像歸為一類,或?qū)⒂邢嗨茪庀髼l件和相似拍攝時間的歷史視頻圖像歸為一類。
24、作為優(yōu)選,在判斷為帶電作業(yè)危險時,發(fā)出告警提醒作業(yè)人員,告警信號包括聲音警報、視覺警報或震動警報中的一種或多種。
25、本發(fā)明的有益效果是:本發(fā)明利用無人機圍繞在高空實施帶電作業(yè)的人員,在特定角度和距離下實時拍攝并推送出視頻圖像信息,能夠?qū)崟r獲取作業(yè)人員位置和姿態(tài)信息。再基于既有三維模型基礎(chǔ),就可以實現(xiàn)人員的空間定位,獲取其三維坐標(biāo)。依據(jù)電力設(shè)備的實際尺寸與畫面中像素尺寸的對應(yīng)關(guān)系,計算出帶電作業(yè)人員帶電消缺過程中與接地體、帶電體之間的距離。從而實現(xiàn)高壓輸電場景下對帶電作業(yè)人員的安全距離和空間相對位置的立體監(jiān)護,避免突破規(guī)范距離進入危險區(qū)域的隱患發(fā)生,從而實時監(jiān)護作業(yè)人員施工安全,提高作業(yè)安全性。
技術(shù)特征:
1.一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,包括以下步驟:
2.根據(jù)權(quán)利要求1所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,所述的步驟2中,提取視頻圖像信息中的特征信息為通過經(jīng)過訓(xùn)練的深度學(xué)習(xí)模型提取特征信息,對作業(yè)人員和電力設(shè)備進行自動識別并跟蹤。
3.根據(jù)權(quán)利要求2所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,所述的深度學(xué)習(xí)模型為卷積神經(jīng)網(wǎng)絡(luò)圖像識別模型,對于卷積神經(jīng)網(wǎng)絡(luò)圖像識別模型進行訓(xùn)練的過程為:
4.根據(jù)權(quán)利要求3所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,所述的步驟2c中,所述的歷史視頻圖像為經(jīng)過預(yù)處理后的圖像,所述的預(yù)處理的過程為:
5.根據(jù)權(quán)利要求4所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,在步驟1中,還將實時視頻圖像與歷史視頻圖像進行比較,在歷史視頻圖像中尋找與實時視頻圖像最相似歷史視頻圖像,獲取該歷史視頻圖像對應(yīng)的分類類別,運用該分類類別對應(yīng)的卷積神經(jīng)網(wǎng)絡(luò)圖像識別模型對于實時視頻圖像進行識別。
6.根據(jù)權(quán)利要求1所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,所述的組合間隙值為人與帶電體最短直線距離加人與接地體最短直線距離之和。
7.根據(jù)權(quán)利要求6所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,所述的步驟4具體為:
8.根據(jù)權(quán)利要求4所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,還采集高空作業(yè)的氣象條件信息,氣象條件信息包括風(fēng)速、溫度和濕度。
9.根據(jù)權(quán)利要求8所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,在對歷史視頻圖像進行分類時,還按氣象條件進行分類,將有相似氣象條件和相似拍攝日期的歷史視頻圖像歸為一類,或?qū)⒂邢嗨茪庀髼l件和相似拍攝時間的歷史視頻圖像歸為一類。
10.根據(jù)權(quán)利要求1所述的一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,其特征是,在判斷為帶電作業(yè)危險時,發(fā)出告警提醒作業(yè)人員,告警信號包括聲音警報、視覺警報或震動警報中的一種或多種。
技術(shù)總結(jié)
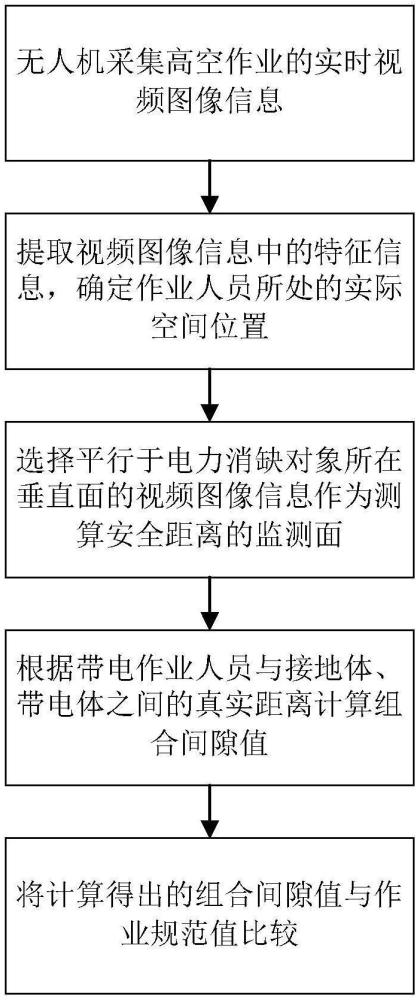
本發(fā)明公開了一種基于實時空間定位的帶電作業(yè)監(jiān)護方法,包括以下步驟:步驟1,無人機采集高空作業(yè)的實時視頻圖像信息;步驟2,提取視頻圖像信息中的特征信息,確定作業(yè)人員所處的實際空間位置;步驟3,選擇平行于電力消缺對象所在垂直面的視頻圖像信息作為測算安全距離的監(jiān)測面;步驟4,根據(jù)帶電作業(yè)人員與接地體、帶電體之間的真實距離計算組合間隙值;步驟5,將計算得出的組合間隙值與作業(yè)規(guī)范值比較,若組合間隙值大于等于作業(yè)規(guī)范值,則判斷當(dāng)前帶電作業(yè)安全,若組合間隙值小于作業(yè)規(guī)范值,則判斷為帶電作業(yè)危險。實現(xiàn)高壓輸電場景下對帶電作業(yè)人員的安全距離和空間相對位置的立體監(jiān)護,避免突破規(guī)范距離進入危險區(qū)域的隱患發(fā)生。
技術(shù)研發(fā)人員:江炯,費佳寧,李虎雄,朱敏輝,吳敦,王倩,蔣科若,舒昊,李琪,張平,顧天瑞,李明磊
受保護的技術(shù)使用者:國網(wǎng)浙江省電力有限公司寧波供電公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!