車載全景影像的外參標定方法、裝置及設備與流程
本申請涉及輔助駕駛,具體地涉及一種車載全景影像的外參標定方法、裝置及設備。
背景技術:
1、車載全景影像技術是一種在車機系統中對車輛360度鳥瞰圖進行顯示的技術。利用部署于車身的多個攝像頭同時拍攝車輛周圍環境的圖像,通過圖像算法將采集到的多張圖像拼接在一起,可以呈現出車輛周圍全景鳥瞰視角,提高駕駛者的周圍環境感知能力。而要實現全景影像的圖像處理算法,準確完成對多張圖像的拼接,離不開對攝像頭的外參標定。
2、在攝像頭外參標定時,傳統的外參標定方法需要在固定標定場地內進行。同時對于場地空間、標靶擺放和環境光線的要求較高,再考慮到場地和標靶成本,不利于車載全景影像的外參標定。
技術實現思路
1、本發明實施例提供了一種車載全景影像的外參標定方法、裝置及設備,用以解決現有技術中外參標定方法對于場地空間、標靶擺放和環境光線的要求較高,再考慮到場地和標靶成本,不利于車載全景影像執行外參標定的問題。
2、第一方面,本發明實施例提供了一種車載全景影像的外參標定方法,其特征在于,所述方法包括:
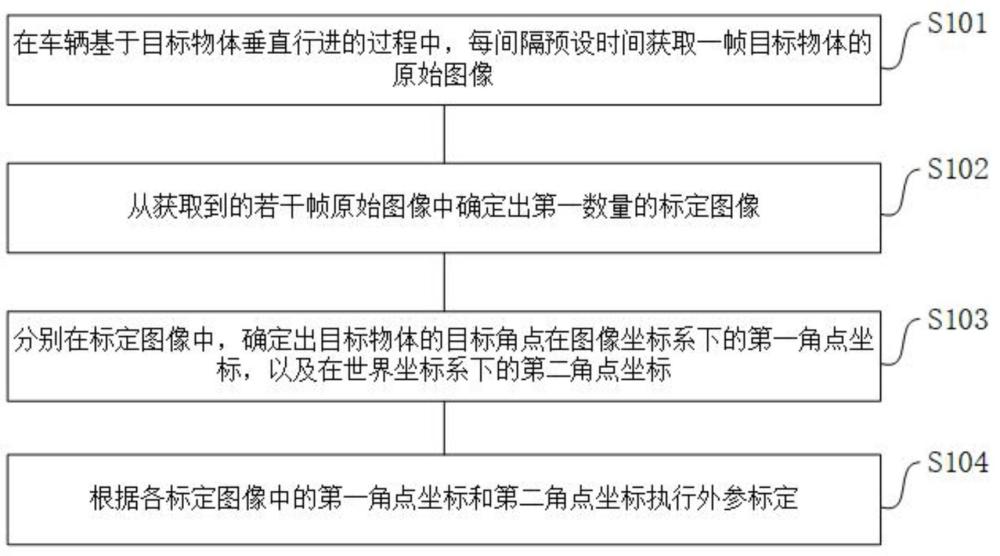
3、在車輛基于目標物體垂直行進的過程中,每間隔預設時間獲取一幀所述目標物體的原始圖像;
4、從獲取到的若干幀原始圖像中確定出第一數量的標定圖像;
5、分別在所述標定圖像中,確定出所述目標物體的目標角點在圖像坐標系下的第一角點坐標,以及在世界坐標系下的第二角點坐標;
6、根據各所述標定圖像中的第一角點坐標和所述第二角點坐標執行外參標定。
7、可選的,確定所述目標物體的目標角點在圖像坐標系下的第一角點坐標,包括:
8、基于所述標定圖像建立圖像坐標系;
9、通過圖像處理算法從所述標定圖像中提取所述目標物體的第一邊緣膨脹圖,所述第一邊緣膨脹圖用于表示所述目標物體的邊緣輪廓;
10、在所述第一邊緣膨脹圖中,通過頂點提取算法獲取所述目標物體各個頂點在所述圖像坐標系下的頂點坐標;
11、從所述目標物體的全部頂點中確定出第二數量的目標角點;
12、將各所述目標角點的頂點坐標確定為所述第一角點坐標。
13、可選的,確定所述目標物體的目標角點在世界坐標系下的第二角點坐標,包括:
14、基于車輛后軸中心建立世界坐標系,在所述世界坐標系中與所述車輛后軸垂直方向為x軸,所述車輛后軸方向為y軸;
15、通過通用外參對車輛的車頭與所述目標物體的位置發生重合時所獲取到的原始圖像進行拼接,以獲取所述車輛的通用鳥瞰圖;
16、在所述通用鳥瞰圖中,從所述目標物體的全部頂點中確定出第二數量的目標角點;
17、根據所述鳥瞰圖中各所述目標角點間的位置關系,以及預設的計算系數scale,確定出各所述目標角點的y軸坐標;
18、根據獲取到的各幀所述原始圖像,獲取各幀所述原始圖像時的車輛速度,以及車輛的第一長度確定出各所述目標角點的x軸坐標,所述車輛的第一長度為車輛軸距與前懸長度之和;
19、根據各所述目標角點的y軸坐標和x軸坐標確定所述第二角點坐標。
20、可選的,所述根據所述鳥瞰圖中各所述目標角點間的位置關系,以及預設的計算系數scale,確定出各所述目標角點的y軸坐標,包括:
21、通過圖像處理算法從所述通用鳥瞰圖中獲取所述目標物體的第二邊緣膨脹圖,所述第二邊緣膨脹圖用于表示所述目標物體的輪廓;
22、在所述第二邊緣膨脹圖中,確定出各所述目標角點的位置關系,所述位置關系包括各所述目標角點與世界坐標系x軸之間的相對位置關系;
23、根據所述目標角點間的位置關系,以及預設的計算系數scale,確定各所述目標角點的y軸坐標;
24、其中,所述計算系數scale用于表示全景影像中像素與現實世界中長度的對應關系。
25、可選的,所述根據獲取到的各幀所述原始圖像,獲取各幀所述原始圖像時的車輛速度,以及車輛的第一長度確定出各所述目標角點的x軸坐標,包括:
26、根據獲取所述標定圖像前,所獲取到原始圖像的第一圖像數量,以及獲取各所述原始圖像時車輛的實時速度,確定車輛在獲取所述標定圖像時所行駛的第一距離;
27、當確定車輛的車頭與所述目標物體的位置發生重合時,根據獲取到原始圖像的第二圖像數量,以及獲取各所述原始圖像時車輛的實時速度,確定車輛的車頭與所述目標物體的位置發生重合時所行駛的第二距離;
28、根據所述第一距離、所述第二距離和所述第一長度確定出各所述目標角點的x軸坐標。
29、可選的,所述確定車輛的車頭與所述目標物體的位置發生重合,包括:
30、獲取各幀所述原始圖像中所述目標物體的周長;
31、將各幀所述原始圖像中,所述目標物體的周長最長的一幀原始圖像的獲取時刻,確定為車輛的車頭與所述目標物體的位置發生重合的時刻。
32、可選地,確定所述目標物體的目標角點,包括:
33、根據所述目標物體中各個頂點與攝像頭光軸的距離,從所述目標物體的全部頂點中確定出第二數量的所述目標角點。
34、可選的,所述圖像處理算法包括:掩模算法、灰度圖算法、膨脹算法、邊緣檢測算法;
35、所述頂點提取算法包括:輪廓檢測算法和多邊形擬合算法。
36、第二方面,本發明實施例提供了一種車載全景影像的外參標定裝置,所述裝置包括:
37、獲取模塊,在車輛基于目標物體垂直行進的過程中,每間隔預設時間獲取一幀所述目標物體的原始圖像;
38、第一確定模塊,從獲取到的若干幀原始圖像中確定出第一數量的標定圖像;
39、第二確定模塊,分別在所述標定圖像中,確定出所述目標物體的目標角點在圖像坐標系下的第一角點坐標,以及在世界坐標系下的第二角點坐標;
40、標定模塊,根據各所述標定圖像中的第一角點坐標和所述第二角點坐標執行外參標定。
41、第三方面,本發明實施例提供了一種電子設備,包括:
42、至少一個處理器;以及
43、與所述處理器通信連接的至少一個存儲器,其中:
44、所述存儲器存儲有可被所述處理器執行的程序指令,所述處理器調用所述程序指令能夠執行如第一方面任一項所述的方法。
45、第四方面,本發明實施例提供了一種存儲介質,所述存儲介質包括存儲的程序,其中,在所述程序運行時控制所述存儲介質所在設備執行第一方面任一項所述的方法。
46、在本發明實施例中,車輛動態行駛通過目標物體的過程中,通過獲取目標物體的原始圖像,并通過圖像識別算法對其進行處理,以從中確定出目標角點在圖像坐標系下的第一角點坐標和在世界坐標系下的第二角點坐標,實現全景影像的外參標定,對場地要求低,動態標定更加靈活,且準確度更高,確保全景影像的鳥瞰圖中的物體以正確的比例和方向出現,適用于不同車型平臺售后的全景影像外參動態標定。
技術特征:
1.一種車載全景影像的外參標定方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,確定所述目標物體的目標角點在圖像坐標系下的第一角點坐標,包括:
3.根據權利要求1所述的方法,其特征在于,確定所述目標物體的目標角點在世界坐標系下的第二角點坐標,包括:
4.根據權利要求3所述的方法,其特征在于,所述根據所述鳥瞰圖中各所述目標角點間的位置關系,以及預設的計算系數scale,確定出各所述目標角點的y軸坐標,包括:
5.根據權利要求3所述的方法,其特征在于,所述根據獲取到的各幀所述原始圖像,獲取各幀所述原始圖像時的車輛速度,以及車輛的第一長度確定出各所述目標角點的x軸坐標,包括:
6.根據權利要求3所述的方法,其特征在于,所述確定車輛的車頭與所述目標物體的位置發生重合,包括:
7.根據權利要求2-3任一項所述的方法,其特征在于,確定所述目標物體的目標角點,包括:
8.根據權利要求2-4任一項所述的方法,其特征在于,所述圖像處理算法包括:掩模算法、灰度圖算法、膨脹算法、邊緣檢測算法;
9.一種車載全景影像的外參標定裝置,其特征在于,所述裝置包括:
10.一種電子設備,其特征在于,包括:
11.一種存儲介質,其特征在于,所述存儲介質包括存儲的程序,其中,在所述程序運行時控制所述存儲介質所在設備執行權利要求1至8任一項所述的方法。
技術總結
本申請涉及輔助駕駛技術領域,具體地涉及一種車載全景影像的外參標定方法、裝置及設備。一種車載全景影像的外參標定方法,所述方法包括:在車輛基于目標物體垂直行進的過程中,每間隔預設時間獲取一幀所述目標物體的原始圖像;從獲取到的若干幀原始圖像中確定出第一數量的標定圖像;分別在所述標定圖像中,確定出所述目標物體的目標角點在圖像坐標系下的第一角點坐標,以及在世界坐標系下的第二角點坐標;根據各所述標定圖像中的第一角點坐標和所述第二角點坐標執行外參標定。本發明所提供的車載全景影像的外參標定方法,對場地要求低,動態標定更加靈活,且準確度更高,適用于不同車型平臺售后的全景影像外參動態標定。
技術研發人員:陳森林,李天輝,羅覃月,陸海曼,黃文姝
受保護的技術使用者:上汽通用五菱汽車股份有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!