基于人車路環(huán)境交通仿真場景復(fù)雜度評估方法及裝置與流程
本發(fā)明涉及交通數(shù)據(jù)分析,尤其涉及一種基于人車路環(huán)境交通仿真場景復(fù)雜度評估方法及裝置。
背景技術(shù):
1、在道路交通領(lǐng)域,道路環(huán)境復(fù)雜度是對交通參與者周圍環(huán)境的描述與評估,是衡量交通環(huán)境的一個(gè)重要物理指標(biāo)。
2、相關(guān)技術(shù)中,仿真場景的復(fù)雜度評估主要關(guān)注對車輛行駛產(chǎn)生影響的交通因素。然而,未能充分考慮復(fù)雜交通環(huán)境中各種因素的相互作用和綜合影響,因此,場景復(fù)雜度的評估結(jié)果有待提升。
技術(shù)實(shí)現(xiàn)思路
1、本說明書實(shí)施方式旨在至少在一定程度上解決相關(guān)技術(shù)中的技術(shù)問題之一。為此,本說明書實(shí)施方式提出一種基于人車路環(huán)境交通仿真場景復(fù)雜度評估方法及裝置。
2、本說明書實(shí)施方式提供一種基于人車路環(huán)境交通仿真場景復(fù)雜度評估方法,所述方法包括:
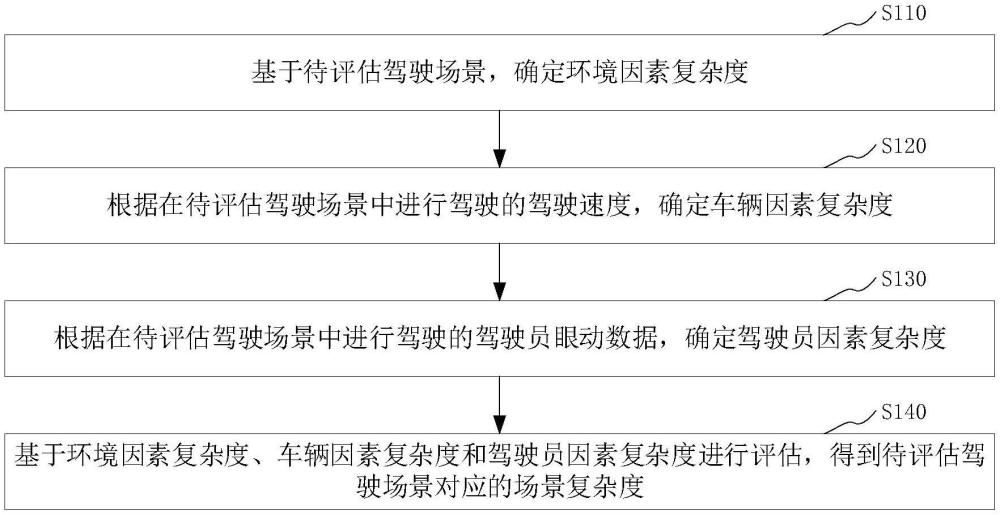
3、基于待評估駕駛場景,確定環(huán)境因素復(fù)雜度;
4、根據(jù)在所述待評估駕駛場景中進(jìn)行駕駛的駕駛速度,確定車輛因素復(fù)雜度;
5、根據(jù)在所述待評估駕駛場景中進(jìn)行駕駛的駕駛員眼動(dòng)數(shù)據(jù),確定駕駛員因素復(fù)雜度;
6、基于所述環(huán)境因素復(fù)雜度、所述車輛因素復(fù)雜度和所述駕駛員因素復(fù)雜度進(jìn)行評估,得到所述待評估駕駛場景對應(yīng)的場景復(fù)雜度。
7、在其中一個(gè)實(shí)施方式,所述基于待評估駕駛場景,確定環(huán)境因素復(fù)雜度,包括:
8、對所述待評估駕駛場景進(jìn)行分析,確定所述待評估駕駛場景中包括的場景要素和所述場景要素對應(yīng)的要素結(jié)構(gòu)圖;
9、基于待評估駕駛場景中包括的場景要素、所述要素結(jié)構(gòu)圖和場景要素分值表確定所述環(huán)境因素復(fù)雜度。
10、在其中一個(gè)實(shí)施方式,所述場景要素分值表包括第一級要素,所述第一級要素包括第二級要素,確定所述場景要素對應(yīng)的要素結(jié)構(gòu)圖,包括:
11、基于所述第一級要素和所述第二級要素對所述待評估駕駛場景中包括的場景要素進(jìn)行分級,確定所述要素結(jié)構(gòu)圖。
12、在其中一個(gè)實(shí)施方式,所述場景要素分值表包括第一級要素和第一級要素對應(yīng)的分值,所述第一級要素包括第二級要素和第二級要素對應(yīng)的分值,所述基于待評估駕駛場景中包括的場景要素、所述要素結(jié)構(gòu)圖和場景要素分值表確定所述環(huán)境因素復(fù)雜度,包括:
13、基于所述要素結(jié)構(gòu)圖確定環(huán)境因素系數(shù);
14、基于所述待評估駕駛場景中包括的場景要素中的第一級要素對應(yīng)的分值,確定所述待評估駕駛場景中包括的第一級要素對應(yīng)的權(quán)重;
15、根據(jù)所述環(huán)境因素系數(shù)、所述待評估駕駛場景中包括的第一級要素對應(yīng)的權(quán)重、所述待評估駕駛場景中包括的第二級要素對應(yīng)的分值確定所述環(huán)境因素復(fù)雜度。
16、在其中一個(gè)實(shí)施方式,所述基于所述要素結(jié)構(gòu)圖確定環(huán)境因素系數(shù),包括:
17、根據(jù)所述要素結(jié)構(gòu)圖中各節(jié)點(diǎn)的輸入輸出個(gè)數(shù)進(jìn)行分組,得到多個(gè)節(jié)點(diǎn)分組,其中,每個(gè)節(jié)點(diǎn)分組對應(yīng)有同組節(jié)點(diǎn)個(gè)數(shù);
18、根據(jù)每個(gè)節(jié)點(diǎn)分組對應(yīng)的同組節(jié)點(diǎn)個(gè)數(shù)和所述要素結(jié)構(gòu)圖的節(jié)點(diǎn)總數(shù)進(jìn)行計(jì)算,得到每個(gè)節(jié)點(diǎn)分組對應(yīng)的出現(xiàn)概率;
19、利用信息熵計(jì)算方法對基于每個(gè)節(jié)點(diǎn)分組對應(yīng)的出現(xiàn)概率和節(jié)點(diǎn)分組的總數(shù)進(jìn)行計(jì)算,得到所述環(huán)境因素系數(shù)。
20、在其中一個(gè)實(shí)施方式,所述根據(jù)在所述待評估駕駛場景中進(jìn)行駕駛的駕駛員眼動(dòng)數(shù)據(jù),確定駕駛員因素復(fù)雜度,包括:
21、根據(jù)目標(biāo)坐標(biāo)系對在所述待評估駕駛場景中進(jìn)行駕駛的駕駛員視覺注視點(diǎn)的位置坐標(biāo)進(jìn)行映射,確定每個(gè)興趣區(qū)域內(nèi)的視覺注視點(diǎn),其中,所述目標(biāo)坐標(biāo)系是根據(jù)目標(biāo)區(qū)域確定的,所述目標(biāo)區(qū)域被劃分為多個(gè)興趣區(qū)域;
22、根據(jù)每個(gè)興趣區(qū)域內(nèi)的視覺注視點(diǎn)個(gè)數(shù)和視覺注視點(diǎn)的總數(shù)進(jìn)行計(jì)算,確定每個(gè)所述興趣區(qū)域?qū)?yīng)的注視概率;
23、利用信息熵計(jì)算方法基于興趣區(qū)域的總數(shù)和每個(gè)所述興趣區(qū)域?qū)?yīng)的注視概率進(jìn)行計(jì)算,確定所述駕駛員因素復(fù)雜度。
24、在其中一個(gè)實(shí)施方式,所述基于所述環(huán)境因素復(fù)雜度、所述車輛因素復(fù)雜度和所述駕駛員因素復(fù)雜度進(jìn)行評估,得到所述待評估駕駛場景對應(yīng)的場景復(fù)雜度,包括:
25、利用層次分析法對所述環(huán)境因素復(fù)雜度、所述車輛因素復(fù)雜度和所述駕駛員因素復(fù)雜度進(jìn)行計(jì)算,確定所述環(huán)境因素復(fù)雜度、所述車輛因素復(fù)雜度和所述駕駛員因素復(fù)雜度各自對應(yīng)的權(quán)重;
26、根據(jù)所述環(huán)境因素復(fù)雜度、所述車輛因素復(fù)雜度和所述駕駛員因素復(fù)雜度各自對應(yīng)的權(quán)重和所述環(huán)境因素復(fù)雜度、所述車輛因素復(fù)雜度和所述駕駛員因素復(fù)雜度進(jìn)行計(jì)算,得到所述待評估駕駛場景對應(yīng)的場景復(fù)雜度。
27、本說明書實(shí)施方式提供一種基于人車路環(huán)境交通仿真場景復(fù)雜度評估裝置,所述裝置包括:
28、環(huán)境因素復(fù)雜度確定模塊,用于基于待評估駕駛場景,確定環(huán)境因素復(fù)雜度;
29、車輛因素復(fù)雜度確定模塊,用于根據(jù)在所述待評估駕駛場景中進(jìn)行駕駛的駕駛速度,確定車輛因素復(fù)雜度;
30、駕駛員因素復(fù)雜度確定模塊,用于根據(jù)在所述待評估駕駛場景中進(jìn)行駕駛的駕駛員眼動(dòng)數(shù)據(jù),確定駕駛員因素復(fù)雜度;
31、場景復(fù)雜度確定模塊,用于基于所述環(huán)境因素復(fù)雜度、所述車輛因素復(fù)雜度和所述駕駛員因素復(fù)雜度進(jìn)行評估,得到所述待評估駕駛場景對應(yīng)的場景復(fù)雜度。
32、本說明書實(shí)施方式提供一種計(jì)算機(jī)設(shè)備,所述計(jì)算機(jī)設(shè)備包括:存儲器,以及與所述存儲器通信連接的一個(gè)或多個(gè)處理器;所述存儲器中存儲有可被所述一個(gè)或多個(gè)處理器執(zhí)行的指令,所述指令被所述一個(gè)或多個(gè)處理器執(zhí)行,以使所述一個(gè)或多個(gè)處理器實(shí)現(xiàn)上述任一項(xiàng)實(shí)施方式所述的方法的步驟。
33、本說明書實(shí)施方式提供計(jì)算機(jī)可讀存儲介質(zhì),其上存儲有計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述任一項(xiàng)實(shí)施方式所述的方法的步驟。
34、本說明書實(shí)施方式提供一種計(jì)算機(jī)程序產(chǎn)品,所述計(jì)算機(jī)程序產(chǎn)品中包括指令,所述指令被計(jì)算機(jī)設(shè)備的處理器執(zhí)行時(shí),使得所述計(jì)算機(jī)設(shè)備能夠執(zhí)行上述任一項(xiàng)實(shí)施方式所述的方法的步驟。
35、上述說明書實(shí)施方式中,首先,基于待評估駕駛場景,確定環(huán)境因素復(fù)雜度。根據(jù)在待評估駕駛場景中進(jìn)行駕駛的駕駛速度,確定車輛因素復(fù)雜度。根據(jù)在待評估駕駛場景中進(jìn)行駕駛的駕駛員眼動(dòng)數(shù)據(jù),確定駕駛員因素復(fù)雜度。然后,基于環(huán)境因素復(fù)雜度、車輛因素復(fù)雜度和駕駛員因素復(fù)雜度進(jìn)行評估,得到待評估駕駛場景對應(yīng)的場景復(fù)雜度。通過考慮場景對人-車-路系統(tǒng)的影響,實(shí)現(xiàn)場景的分級量化,從而提高了基于場景的測試方式的測試效率。上述實(shí)施方式能夠更加精準(zhǔn)地模擬和評估不同駕駛場景的實(shí)際復(fù)雜度,進(jìn)而為自動(dòng)駕駛系統(tǒng)和交通安全測試提供更加高效和可靠的支持。
技術(shù)特征:
1.一種基于人車路環(huán)境交通仿真場景復(fù)雜度評估方法,其特征在于,所述方法包括:
2.根據(jù)權(quán)利要求1所述的方法,其特征在于,所述基于待評估駕駛場景,確定環(huán)境因素復(fù)雜度,包括:
3.根據(jù)權(quán)利要求2所述的方法,其特征在于,所述場景要素分值表包括第一級要素,所述第一級要素包括第二級要素,確定所述場景要素對應(yīng)的要素結(jié)構(gòu)圖,包括:
4.根據(jù)權(quán)利要求2所述的方法,其特征在于,所述場景要素分值表包括第一級要素和第一級要素對應(yīng)的分值,所述第一級要素包括第二級要素和第二級要素對應(yīng)的分值,所述基于待評估駕駛場景中包括的場景要素、所述要素結(jié)構(gòu)圖和場景要素分值表確定所述環(huán)境因素復(fù)雜度,包括:
5.根據(jù)權(quán)利要求4所述的方法,其特征在于,所述基于所述要素結(jié)構(gòu)圖確定環(huán)境因素系數(shù),包括:
6.根據(jù)權(quán)利要求1所述的方法,其特征在于,所述根據(jù)在所述待評估駕駛場景中進(jìn)行駕駛的駕駛員眼動(dòng)數(shù)據(jù),確定駕駛員因素復(fù)雜度,包括:
7.根據(jù)權(quán)利要求1所述的方法,其特征在于,所述基于所述環(huán)境因素復(fù)雜度、所述車輛因素復(fù)雜度和所述駕駛員因素復(fù)雜度進(jìn)行評估,得到所述待評估駕駛場景對應(yīng)的場景復(fù)雜度,包括:
8.一種基于人車路環(huán)境交通仿真場景復(fù)雜度評估裝置,其特征在于,所述裝置包括:
9.一種計(jì)算機(jī)設(shè)備,包括存儲器和處理器,所述存儲器存儲有計(jì)算機(jī)程序,其特征在于,所述處理器執(zhí)行所述計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)權(quán)利要求1至7中任一項(xiàng)所述方法的步驟。
10.一種計(jì)算機(jī)可讀存儲介質(zhì),其上存儲有計(jì)算機(jī)程序,其特征在于,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)權(quán)利要求1至7中任一項(xiàng)所述方法的步驟。
技術(shù)總結(jié)
本發(fā)明涉及交通數(shù)據(jù)分析技術(shù)領(lǐng)域,公開了一種基于人車路環(huán)境交通仿真場景復(fù)雜度評估方法及裝置。首先,基于待評估駕駛場景,確定環(huán)境因素復(fù)雜度。根據(jù)在待評估駕駛場景中進(jìn)行駕駛的駕駛速度,確定車輛因素復(fù)雜度。根據(jù)在待評估駕駛場景中進(jìn)行駕駛的駕駛員眼動(dòng)數(shù)據(jù),確定駕駛員因素復(fù)雜度。然后,基于環(huán)境因素復(fù)雜度、車輛因素復(fù)雜度和駕駛員因素復(fù)雜度進(jìn)行評估,得到待評估駕駛場景對應(yīng)的場景復(fù)雜度。通過考慮場景對人?車?路系統(tǒng)的影響,實(shí)現(xiàn)場景的分級量化,從而提高了基于場景的測試方式的測試效率。上述實(shí)施方式能夠更加精準(zhǔn)地模擬和評估不同駕駛場景的實(shí)際復(fù)雜度,進(jìn)而為自動(dòng)駕駛系統(tǒng)和交通安全測試提供更加高效和可靠的支持。
技術(shù)研發(fā)人員:請求不公布姓名,請求不公布姓名,請求不公布姓名,請求不公布姓名
受保護(hù)的技術(shù)使用者:北京津發(fā)科技股份有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會(huì)獲得點(diǎn)贊!