一種BIM模型外殼提取建模方法及系統(tǒng)
本發(fā)明涉及建筑信息化,尤其涉及一種bim模型外殼提取建模方法及系統(tǒng)。
背景技術:
1、建筑物信息模型(building?information?modeling,bim)作為數(shù)字孿生城市中建筑物/構筑物建模的重要數(shù)據(jù)來源,具有幾何精度高、語義和屬性信息豐富的特點,被廣泛的應用于城市環(huán)境模擬、地圖導航、消防應急疏散和虛擬現(xiàn)實等領域。
2、在面對城市級別的大尺度應用時,直接使用微觀尺度表達的bim模型會在可視化和數(shù)據(jù)傳輸時消耗大量的計算開銷和數(shù)據(jù)傳輸帶寬,降低數(shù)字孿生城市系統(tǒng)可視化的效率。外殼提取作為bim輕量化的主要方法之一,通過將bim模型的建筑構件分類為室外和室內(nèi)兩部分,當視點位于室外時僅顯示室外建筑構件的方法來減少數(shù)據(jù)處理量,提高場景可視化效率。然而,現(xiàn)有的外殼提取方法通過在bim模型的包圍球/包圍盒上計算可見性查詢的視點位置,由于受到建筑構件的遮擋以及查詢分辨率的限制,這些方法在提取外部構件時存在嚴重的構件缺失現(xiàn)象,影響數(shù)字孿生城市系統(tǒng)的可視化效果。
3、現(xiàn)有技術使用固定視點實現(xiàn)bim外部三角形表面的提取,如專利cn201910406575.6。首先,將bim模型的每個三角形賦予唯一的顏色;然后,通過計算bim模型的外部包圍盒,選擇包圍盒6個面計算相機視點位置,利用正交投影將顏色編碼的bim模型輸出為多個紋理圖像;最后,通過紋理圖像解碼保留位于bim模型外部的三角形集合,以此作為三維bim模型的外殼。雖然該技術能夠提取bim模型外殼,但存在如下缺點:1.?通過包圍盒計算有限的查詢視點可以實現(xiàn)自動化的外殼提取,但僅限于簡單的bim模型。對于存在構件遮擋的復雜bim模型會出現(xiàn)大量的數(shù)據(jù)缺失;2.?整個bim模型的逐三角形顏色編碼,丟失了bim模型固有的語義和屬性信息。
4、因此,亟需一種有效的bim外殼提取方法。
技術實現(xiàn)思路
1、本發(fā)明提供一種bim模型外殼提取建模方法及系統(tǒng),用以解決現(xiàn)有技術中提取bim外殼信息所存在的缺陷。
2、第一方面,本發(fā)明提供一種bim模型外殼提取建模方法,包括:
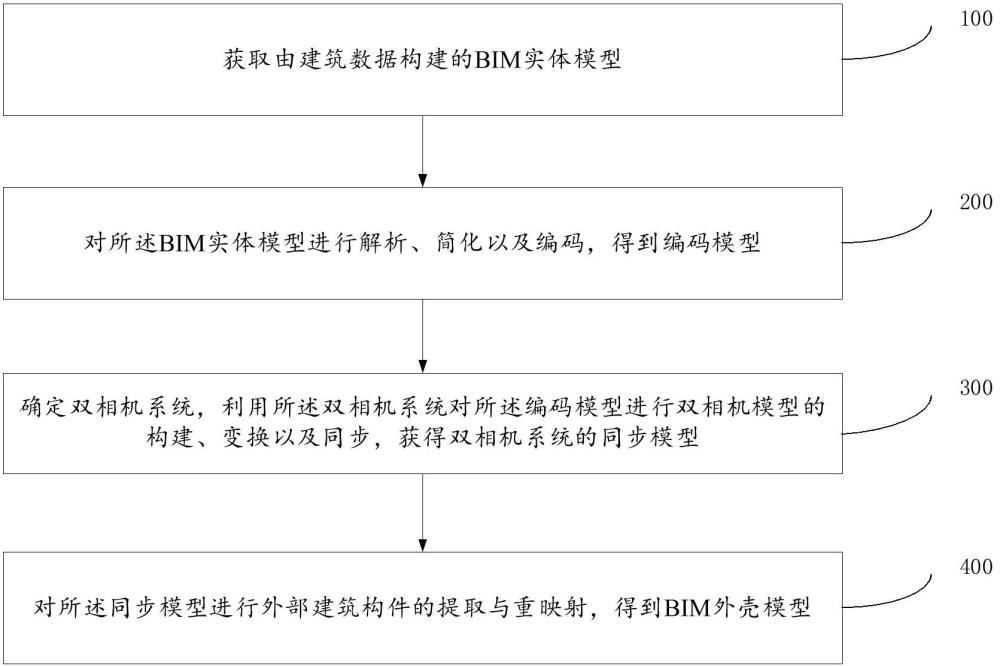
3、獲取由建筑數(shù)據(jù)構建的bim實體模型;
4、對所述bim實體模型進行解析、簡化以及編碼,得到編碼模型;
5、確定雙相機系統(tǒng),利用所述雙相機系統(tǒng)對所述編碼模型進行雙相機模型的構建、變換以及同步,獲得雙相機系統(tǒng)的同步模型;
6、對所述同步模型進行外部建筑構件的提取與重映射,得到bim外殼模型。
7、根據(jù)本發(fā)明提供的一種bim模型外殼提取建模方法,對所述bim實體模型進行解析、簡化以及編碼,得到編碼模型,包括:
8、解析所述bim實體模型的工業(yè)基礎類ifc模型,獲取各個建筑構件實體的?ifc幾何信息和ifc語義信息,將所述ifc幾何信息和所述ifc語義信息保存為geode節(jié)點,并將建筑構件的語義類型存儲在geode節(jié)點的名稱屬性中,將所述geode節(jié)點添加至osg?group節(jié)點中,得到bim實體模型;
9、復制所述osg?group節(jié)點,遞歸查詢geode節(jié)點名稱,獲取ifcwindow節(jié)點和ifcdoor節(jié)點,計算有向包圍盒簡化門窗模型并替換對應節(jié)點,得到bim簡化模型;
10、對兩個osg?group節(jié)點下的geode節(jié)點分別按照順序從1開始進行編碼,將所述bim簡化模型的geode節(jié)點的id值轉(zhuǎn)換為rgba顏色向量,得到編碼模型。
11、根據(jù)本發(fā)明提供的一種bim模型外殼提取建模方法,確定雙相機系統(tǒng),利用所述雙相機系統(tǒng)對所述編碼模型進行雙相機模型的構建、變換以及同步,獲得雙相機系統(tǒng)的同步模型,包括:
12、構建主攝像機和輔助攝像機組成的雙相機系統(tǒng);
13、利用所述bim實體模型的包圍球計算初始的視圖變換矩陣、透視投影矩陣和視口變換矩陣;
14、通過鼠標和鍵盤控制四元數(shù)旋轉(zhuǎn)、平移以及縮放對所述視圖變換矩陣進行修改,并更新所述主攝像機和所述輔助攝像機。
15、根據(jù)本發(fā)明提供的一種bim模型外殼提取建模方法,旋轉(zhuǎn)操作包括:
16、確定攝像機在世界坐標系中的位置,確定目標點在世界坐標系的坐標為模型質(zhì)心坐標,攝像機向上方向的向量為,向右方向為;
17、步驟1.1,鼠標左鍵按下時在屏幕上的二維坐標和深度值,得到世界坐標系中的位置:
18、(1)
19、步驟1.2,通過鼠標移動得到下一個二維坐標和深度值,并利用公式1得到更新后的世界坐標系的位置;
20、步驟1.3,計算從向量到的四元數(shù)旋轉(zhuǎn)矩陣,更新攝像機的位置和朝向:
21、(2)
22、步驟1.4,每次移動鼠標時執(zhí)行步驟1.2和步驟1.3,直到鼠標左鍵松開為止。
23、根據(jù)本發(fā)明提供的一種bim模型外殼提取建模方法,平移操作包括:
24、步驟2.1,鼠標右鍵按下時在屏幕上的二維坐標和深度值,利用公式(1)變換為世界坐標系中的位置;
25、步驟2.2,通過鼠標移動得到下一個二維坐標和深度值,利用公式(1)得到更新后的世界坐標系的位置;
26、步驟2.3,計算向量在攝像機坐標軸和方向上的投影:
27、(3)
28、步驟2.4,更新攝像機和觀察目標點的位置:
29、(4)
30、步驟2.5,每次移動鼠標時執(zhí)行步驟2.3和步驟2.4,直到鼠標右鍵松開為止。
31、根據(jù)本發(fā)明提供的一種bim模型外殼提取建模方法,縮放操作包括:
32、確定縮放因子更新相機位置:
33、(5)
34、監(jiān)聽鍵盤事件或者鼠標滾輪事件,利用正縮放因子和/或負縮放因子實現(xiàn)場景縮放控制。
35、根據(jù)本發(fā)明提供的一種bim模型外殼提取建模方法,對所述同步模型進行外部建筑構件的提取與重映射,得到bim外殼模型,包括:
36、對所述同步模型中每個建筑構件的geode節(jié)點綁定頂點顏色,顏色值為編碼的rgba顏色向量;
37、將所有建筑構件geode節(jié)點中的頂點數(shù)組、顏色數(shù)組、三角形索引數(shù)據(jù)復制到同一個geode節(jié)點,所述同一個geode節(jié)點為查詢節(jié)點;
38、在主攝像機中添加真實bim實體模型,進行屏幕可視化展示,在輔助攝像機中添加所述查詢節(jié)點,利用渲染到紋理rtt技術輸出每個視點下的可見性圖像;
39、在輔助攝像機的回調(diào)函數(shù)中解析所述可見性圖像中每個像素的rgba顏色值,將所述rgba顏色值轉(zhuǎn)換為建筑物構件id,確定所述建筑物構件id在主攝像機中高亮顯示;
40、導出bim實體模型中所有高亮標注的建筑構件geode節(jié)點,形成所述bim外殼模型。
41、第二方面,本發(fā)明還提供一種bim模型外殼提取建模系統(tǒng),包括:
42、獲取模塊,用于獲取由建筑數(shù)據(jù)構建的bim實體模型;
43、解析模塊,用于對所述bim實體模型進行解析、簡化以及編碼,得到編碼模型;
44、雙相機系統(tǒng)同步模塊,用于確定雙相機系統(tǒng),利用所述雙相機系統(tǒng)對所述編碼模型進行雙相機模型的構建、變換以及同步,獲得雙相機系統(tǒng)的同步模型;
45、提取模塊,用于對所述簡化后模型進行外部建筑構件的提取與重映射,得到bim外殼模型。
46、第三方面,本發(fā)明還提供一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執(zhí)行所述程序時實現(xiàn)如上述任一種所述bim模型外殼提取建模方法。
47、第四方面,本發(fā)明還提供一種非暫態(tài)計算機可讀存儲介質(zhì),其上存儲有計算機程序,該計算機程序被處理器執(zhí)行時實現(xiàn)如上述任一種所述bim模型外殼提取建模方法。
48、本發(fā)明提供的bim模型外殼提取建模方法及系統(tǒng),通過實時交互可視化的方式實現(xiàn)bim外殼構件的選擇,可以提高復雜bim模型外殼提取的準確度和效率,無需額外布置可視化查詢的視點,在面對建筑構件的遮擋嚴重的復雜bim模型中可以起到顯著的外殼提取效果。
- 還沒有人留言評論。精彩留言會獲得點贊!