一種圖像模板匹配方法及監(jiān)測(cè)系統(tǒng)、裝置、存儲(chǔ)介質(zhì)與流程
本發(fā)明涉及計(jì)算機(jī)圖像分析,特別涉及一種圖像模板匹配方法及監(jiān)測(cè)系統(tǒng)、裝置、存儲(chǔ)介質(zhì)。
背景技術(shù):
1、隨著電子工業(yè)的發(fā)展,pcb所承載的電子電路的復(fù)雜度和密度不斷增加,在pcb出廠前需要對(duì)其上的電子電路的質(zhì)量進(jìn)行檢測(cè),而傳統(tǒng)的人工檢測(cè)方法已無(wú)法滿足現(xiàn)代生產(chǎn)線的需求。
2、自動(dòng)光學(xué)檢測(cè)(aoi)作為一種高效、準(zhǔn)確的檢測(cè)手段,可以引進(jìn)到pcb的質(zhì)量檢測(cè)環(huán)節(jié)中,在pcb制造業(yè)中得到了廣泛應(yīng)用。自動(dòng)光學(xué)檢測(cè)通過(guò)采集pcb的圖像,將采集圖像和模板圖像分析,可以得出采樣圖像表面的缺陷區(qū)域,進(jìn)而提醒質(zhì)檢人員對(duì)pcb進(jìn)行檢查。其中,現(xiàn)有的對(duì)采集圖像和模板圖像的分析方法是利用特征提取模型來(lái)提取采集圖像中的特征點(diǎn),而后與模板圖像中的特征點(diǎn),并將相應(yīng)的特征點(diǎn)關(guān)聯(lián),而后再進(jìn)行對(duì)比。
3、然而隨著pcb設(shè)計(jì)的日益復(fù)雜和生產(chǎn)速度的不斷提高,pcb表面的細(xì)節(jié)繁多,導(dǎo)致特征點(diǎn)的提取存在紕漏,并且由于還存在對(duì)pcb旋轉(zhuǎn)、平移等操作,特征點(diǎn)的匹配處理負(fù)荷較大,無(wú)法應(yīng)對(duì)在大規(guī)模pcb生產(chǎn)中,需要對(duì)大量的圖像進(jìn)行快速檢測(cè)的需求,特別是在應(yīng)對(duì)復(fù)雜情況時(shí),計(jì)算量大、速度慢等問(wèn)題突出,無(wú)法滿足大規(guī)模生產(chǎn)的實(shí)時(shí)性要求。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明旨在至少解決現(xiàn)有技術(shù)中存在的技術(shù)問(wèn)題之一。為此,本發(fā)明提出一種圖像模板匹配方法及監(jiān)測(cè)系統(tǒng)、裝置、存儲(chǔ)介質(zhì),降低計(jì)算負(fù)荷,提高分析效率,縮短處理時(shí)間。
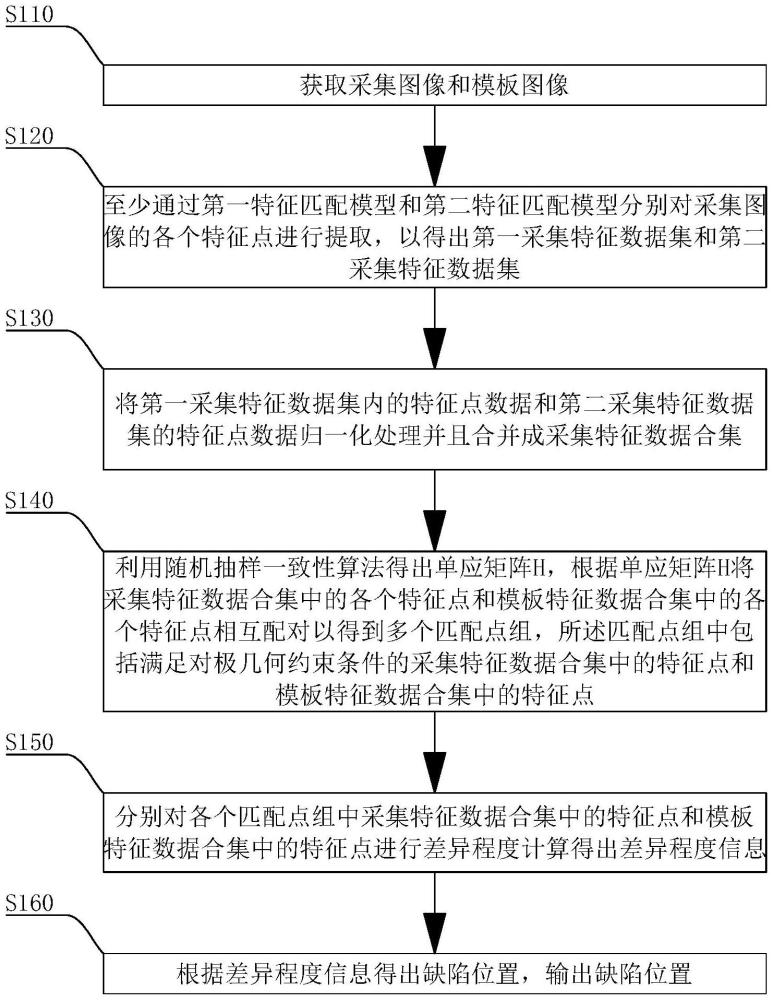
2、根據(jù)本發(fā)明的第一方面實(shí)施例的一種圖像模板匹配方法,包括:獲取采集圖像和模板圖像;至少通過(guò)第一特征匹配模型和第二特征匹配模型分別對(duì)采集圖像的各個(gè)特征點(diǎn)進(jìn)行提取,以得出第一采集特征數(shù)據(jù)集和第二采集特征數(shù)據(jù)集;將第一采集特征數(shù)據(jù)集內(nèi)的特征點(diǎn)數(shù)據(jù)和第二采集特征數(shù)據(jù)集的特征點(diǎn)數(shù)據(jù)歸一化處理并且合并成采集特征數(shù)據(jù)合集;利用隨機(jī)抽樣一致性算法得出單應(yīng)矩陣h,根據(jù)單應(yīng)矩陣h將采集特征數(shù)據(jù)合集中的各個(gè)特征點(diǎn)和模板特征數(shù)據(jù)合集中的各個(gè)特征點(diǎn)相互配對(duì)以得到多個(gè)匹配點(diǎn)組,所述匹配點(diǎn)組中包括滿足對(duì)極幾何約束條件的采集特征數(shù)據(jù)合集中的特征點(diǎn)和模板特征數(shù)據(jù)合集中的特征點(diǎn),其中,所述模板特征數(shù)據(jù)合集中的特征點(diǎn)包括第一模板特征數(shù)據(jù)集內(nèi)的特征點(diǎn)數(shù)據(jù)和第二模板特征數(shù)據(jù)集的特征點(diǎn)數(shù)據(jù)經(jīng)過(guò)歸一化處理后合并而來(lái),第一模板特征數(shù)據(jù)集由第一特征匹配模型對(duì)模板圖像的各個(gè)特征點(diǎn)進(jìn)行提取而得出,第二模板特征數(shù)據(jù)集由第二特征匹配模型對(duì)模板圖像的各個(gè)特征點(diǎn)進(jìn)行提取而得出;分別對(duì)各個(gè)匹配點(diǎn)組中采集特征數(shù)據(jù)合集中的特征點(diǎn)和模板特征數(shù)據(jù)合集中的特征點(diǎn)進(jìn)行差異程度計(jì)算以得出差異程度信息;根據(jù)差異程度信息得出缺陷位置,輸出缺陷位置。
3、根據(jù)本發(fā)明實(shí)施例的一種圖像模板匹配方法,至少具有如下有益效果:
4、本發(fā)明圖像模板匹配方法,在獲取采集圖像,至少通過(guò)第一特征匹配模型和第二特征匹配模型來(lái)分別對(duì)采集圖像的各個(gè)特征點(diǎn)進(jìn)行提取,而后將提取的特征點(diǎn)數(shù)據(jù)歸一化處理并且合并成采集特征數(shù)據(jù)合集,統(tǒng)一地對(duì)采集特征數(shù)據(jù)合集中的特征點(diǎn)通過(guò)單應(yīng)矩陣h與模板特征數(shù)據(jù)合集中的特征點(diǎn)配對(duì)呈匹配點(diǎn)組,此時(shí)再對(duì)匹配點(diǎn)組中來(lái)自采集特征數(shù)據(jù)合集中的特征點(diǎn)和來(lái)自模板特征數(shù)據(jù)合集中的特征點(diǎn)進(jìn)行差異程度計(jì)算,若差異較大,則存在缺陷,并且得知缺陷位置,本設(shè)計(jì)先通過(guò)隨機(jī)抽樣一致性算法縮小了特征點(diǎn)的匹配范圍,使得匹配點(diǎn)組中相互配對(duì)的特征點(diǎn)需要滿足對(duì)極幾何約束條件,而后再進(jìn)行差異程度計(jì)算,降低計(jì)算負(fù)荷,提高分析效率,縮短處理時(shí)間。
5、根據(jù)本發(fā)明的一些實(shí)施例,在所述分別對(duì)各個(gè)匹配點(diǎn)組中采集特征數(shù)據(jù)合集中的特征點(diǎn)和模板特征數(shù)據(jù)合集中的特征點(diǎn)進(jìn)行差異程度計(jì)算以得出差異程度信息中包括:計(jì)算每組相互匹配的采集特征數(shù)據(jù)合集中的特征點(diǎn)和模板特征數(shù)據(jù)合集中的特征點(diǎn)的歐式距離值;根據(jù)歐式距離值形成差異程度信息;當(dāng)歐式距離值大于距離閾值,則根據(jù)該匹配點(diǎn)組得出缺陷位置。
6、根據(jù)本發(fā)明的一些實(shí)施例,所述第一采集特征數(shù)據(jù)集和所述第二采集特征數(shù)據(jù)集的特征點(diǎn)數(shù)據(jù)包括各個(gè)特征點(diǎn)以及與特征點(diǎn)對(duì)應(yīng)的描述符,其中,描述符中包括特征點(diǎn)的坐標(biāo)向量數(shù)值;在所述將第一采集特征數(shù)據(jù)集內(nèi)的特征點(diǎn)數(shù)據(jù)和第二采集特征數(shù)據(jù)集的特征點(diǎn)數(shù)據(jù)歸一化處理并且合并成采集特征數(shù)據(jù)合集中包括:將第一采集特征數(shù)據(jù)集和所述第二采集特征數(shù)據(jù)集中描述符的坐標(biāo)向量數(shù)值歸一化處理成相同的數(shù)值規(guī)格;將第一采集特征數(shù)據(jù)集和所述第二采集特征數(shù)據(jù)集的各個(gè)特征點(diǎn)合并形成特征點(diǎn)列表;將歸一化處理后的第一采集特征數(shù)據(jù)集和所述第二采集特征數(shù)據(jù)集的各個(gè)坐標(biāo)向量數(shù)值合并形成描述符矩陣。
7、根據(jù)本發(fā)明的一些實(shí)施例,在所述根據(jù)單應(yīng)矩陣h將采集特征數(shù)據(jù)合集中的各個(gè)特征點(diǎn)和模板特征數(shù)據(jù)合集中的各個(gè)特征點(diǎn)相互配對(duì)以得到多個(gè)匹配點(diǎn)組中包括對(duì)采集特征數(shù)據(jù)合集中的各個(gè)特征點(diǎn)均進(jìn)行配對(duì)步驟,其中,配對(duì)步驟包括:根據(jù)單應(yīng)矩陣h為采集特征數(shù)據(jù)合集的特征點(diǎn)p1搜尋模板特征數(shù)據(jù)合集中的特征點(diǎn)p2,特征點(diǎn)p1的齊次坐標(biāo)為[x1,y1,1],特征點(diǎn)p2的齊次坐標(biāo)為[x2,y2,1],相互配對(duì)的采集特征數(shù)據(jù)合集的特征點(diǎn)p1和模板特征數(shù)據(jù)合集的特征點(diǎn)p2符合其中,為特征點(diǎn)p2齊次坐標(biāo)的轉(zhuǎn)置矩陣,k為對(duì)極幾何約束閾值。
8、在所述根據(jù)單應(yīng)矩陣h為采集特征數(shù)據(jù)合集的特征點(diǎn)p1搜尋模板特征數(shù)據(jù)合集中特征點(diǎn)p2中包括:
9、篩選模板特征數(shù)據(jù)合集中的各個(gè)特征點(diǎn)p2;
10、當(dāng)則將該特征點(diǎn)p2篩除;
11、當(dāng)則將該特征點(diǎn)p2與特征點(diǎn)p1形成匹配點(diǎn)組。
12、根據(jù)本發(fā)明的一些實(shí)施例,在所述獲取采集圖像和模板圖像中包括:基于線掃相機(jī)與用于放置待掃描物件的移動(dòng)平臺(tái)的關(guān)系構(gòu)建出世界坐標(biāo)系;將采集圖像的坐標(biāo)和模板圖像的坐標(biāo)轉(zhuǎn)換統(tǒng)一至世界坐標(biāo)系中。
13、根據(jù)本發(fā)明的一些實(shí)施例,所述世界坐標(biāo)系的初始變換矩陣為:
14、
15、其中,w為世界坐標(biāo)系的初始變換矩陣;r0為線掃相機(jī)相對(duì)待掃描物件的初始旋轉(zhuǎn)矩陣,d0為線掃相機(jī)相對(duì)待掃描物件的初始位移矩陣;
16、當(dāng)移動(dòng)平臺(tái)以速度v平移δt后,世界坐標(biāo)系的變換矩陣為:
17、
18、根據(jù)本發(fā)明第二方面實(shí)施例的監(jiān)測(cè)系統(tǒng),包括:移動(dòng)平臺(tái),用于承載待掃描物件;線掃相機(jī),用于掃描待掃描物件而攝取采集圖像;存儲(chǔ)模塊,用于存儲(chǔ)模板圖像;控制模塊,分別與所述線掃相機(jī)和所述存儲(chǔ)模塊連接,所述控制模塊執(zhí)行上述任一實(shí)施例公開(kāi)的圖像模板匹配方法以得出采集圖像的缺陷位置;輸出模塊,所述控制模塊與所述輸出模塊連接以輸出采集圖像的缺陷位置。
19、根據(jù)本發(fā)明實(shí)施例的監(jiān)測(cè)系統(tǒng),至少具有如下有益效果:
20、本發(fā)明監(jiān)測(cè)系統(tǒng),應(yīng)用上述任一實(shí)施例公開(kāi)的圖像模板匹配方法以得出采集圖像的缺陷位置,降低計(jì)算負(fù)荷,提高分析效率,縮短處理時(shí)間。
21、根據(jù)本發(fā)明第三方面實(shí)施例的控制裝置,所述控制裝置包括存儲(chǔ)器和處理器,所述存儲(chǔ)器存儲(chǔ)有計(jì)算機(jī)程序,所述處理器執(zhí)行所述計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)上述任一實(shí)施例公開(kāi)的圖像模板匹配方法。
22、根據(jù)本發(fā)明第四方面實(shí)施例的計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)存儲(chǔ)有計(jì)算機(jī)程序,其特征在于,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述任一實(shí)施例公開(kāi)的圖像模板匹配方法。
23、本發(fā)明的附加方面和優(yōu)點(diǎn)將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過(guò)本發(fā)明的實(shí)踐了解到。
- 產(chǎn)品的測(cè)試方法、裝置、設(shè)備、...
- 一種湖泊水質(zhì)監(jiān)測(cè)數(shù)據(jù)質(zhì)量控制...
- 一種多波束測(cè)線布設(shè)及數(shù)據(jù)采集...
- 基于分布式實(shí)驗(yàn)設(shè)備的安全檢查...
- 一種基于Infor-GCN模...
- 一種基于BIM平臺(tái)進(jìn)行閘站穩(wěn)...
- 一種異構(gòu)車(chē)聯(lián)網(wǎng)個(gè)性化聯(lián)邦學(xué)習(xí)...
- 模型訓(xùn)練方法、角點(diǎn)檢測(cè)方法和...
- 一種跨平臺(tái)作業(yè)方法、裝置及第...
- 一種基于大模型實(shí)現(xiàn)負(fù)面輿情自...
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!