一種結合圖像識別的城市補償建模方法及系統
本發明涉及城市補償建模,具體涉及一種結合圖像識別的城市補償建模方法及系統。
背景技術:
1、通過圖像識別技術,可以精確監測城市的擴展或區域內的建筑、道路、綠化等設施的變化。然而,目前在利用無人機進行城市圖像采集時,由于飛行速度過快或采樣間隔過大,相鄰路徑之間的重疊區域不足,導致某些城市區域的細節缺失,導致城市建模準確性較低,在補償城市建模中準確性較低的區域時,需要較長的分析時間,進一步增加了模型更新的周期。
技術實現思路
1、本申請提供了一種結合圖像識別的城市補償建模方法及系統,用于針對解決現有技術中城市補償建模準確性低,補償建模效率低的技術問題。
2、鑒于上述問題,本申請提供了一種結合圖像識別的城市補償建模方法及系統。
3、本申請的第一個方面,提供了一種結合圖像識別的城市補償建模方法,所述方法包括:
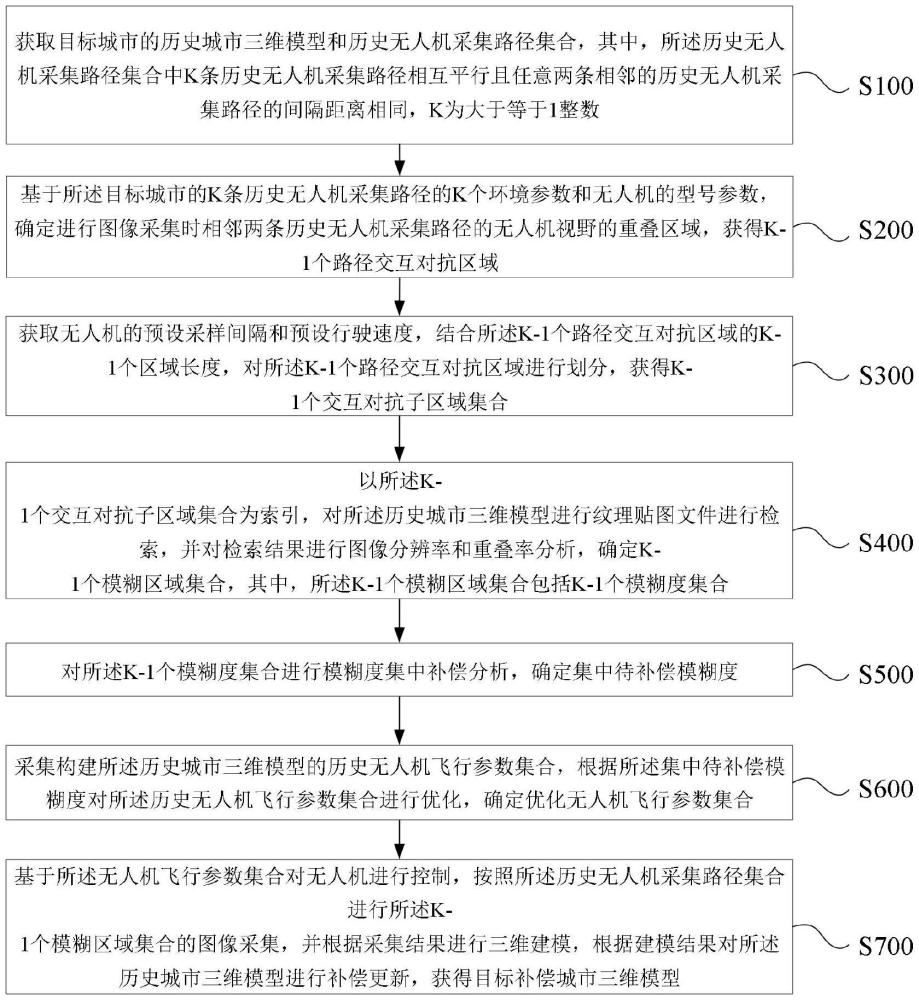
4、獲取目標城市的歷史城市三維模型和歷史無人機采集路徑集合,其中,所述歷史無人機采集路徑集合中k條歷史無人機采集路徑相互平行且任意兩條相鄰的歷史無人機采集路徑的間隔距離相同,k為大于等于1整數;
5、基于所述目標城市的k條歷史無人機采集路徑的k個環境參數和無人機的型號參數,確定進行圖像采集時相鄰兩條歷史無人機采集路徑的無人機視野的重疊區域,獲得k-1個路徑交互對抗區域;
6、獲取無人機的預設采樣間隔和預設行駛速度,結合所述k-1個路徑交互對抗區域的k-1個區域長度,對所述k-1個路徑交互對抗區域進行劃分,獲得k-1個交互對抗子區域集合;
7、以所述k-1個交互對抗子區域集合為索引,對所述歷史城市三維模型進行紋理貼圖文件進行檢索,并對檢索結果進行圖像分辨率和重疊率分析,確定k-1個模糊區域集合,其中,所述k-1個模糊區域集合包括k-1個模糊度集合;
8、對所述k-1個模糊度集合進行模糊度集中補償分析,確定集中待補償模糊度;
9、采集構建所述歷史城市三維模型的歷史無人機飛行參數集合,根據所述集中待補償模糊度對所述歷史無人機飛行參數集合進行優化,確定優化無人機飛行參數集合;
10、基于所述無人機飛行參數集合對無人機進行控制,按照所述歷史無人機采集路徑集合進行所述k-1個模糊區域集合的圖像采集,并根據采集結果進行三維建模,根據建模結果對所述歷史城市三維模型進行補償更新,獲得目標補償城市三維模型。
11、本申請的第二個方面,提供了一種結合圖像識別的城市補償建模系統,所述系統包括:
12、采集路徑集合獲取模塊,用于獲取目標城市的歷史城市三維模型和歷史無人機采集路徑集合,其中,所述歷史無人機采集路徑集合中k條歷史無人機采集路徑相互平行且任意兩條相鄰的歷史無人機采集路徑的間隔距離相同,k為大于等于1整數;
13、路徑交互對抗區域獲得模塊,用于基于所述目標城市的k條歷史無人機采集路徑的k個環境參數和無人機的型號參數,確定進行圖像采集時相鄰兩條歷史無人機采集路徑的無人機視野的重疊區域,獲得k-1個路徑交互對抗區域;
14、交互對抗子區域集合獲得模塊,用于獲取無人機的預設采樣間隔和預設行駛速度,結合所述k-1個路徑交互對抗區域的k-1個區域長度,對所述k-1個路徑交互對抗區域進行劃分,獲得k-1個交互對抗子區域集合;
15、模糊區域集合確定模塊,用于以所述k-1個交互對抗子區域集合為索引,對所述歷史城市三維模型進行紋理貼圖文件進行檢索,并對檢索結果進行圖像分辨率和重疊率分析,確定k-1個模糊區域集合,其中,所述k-1個模糊區域集合包括k-1個模糊度集合;
16、集中待補償模糊度確定模塊,用于對所述k-1個模糊度集合進行模糊度集中補償分析,確定集中待補償模糊度;
17、優化無人機飛行參數集合確定模塊,用于采集構建所述歷史城市三維模型的歷史無人機飛行參數集合,根據所述集中待補償模糊度對所述歷史無人機飛行參數集合進行優化,確定優化無人機飛行參數集合;
18、目標補償城市三維模型獲得模塊,用于基于所述無人機飛行參數集合對無人機進行控制,按照所述歷史無人機采集路徑集合進行所述k-1個模糊區域集合的圖像采集,并根據采集結果進行三維建模,根據建模結果對所述歷史城市三維模型進行補償更新,獲得目標補償城市三維模型。
19、本申請中提供的一個或多個技術方案,至少具有如下技術效果或優點:
20、本申請通過獲取目標城市的歷史城市三維模型和歷史無人機采集路徑集合,其中,歷史無人機采集路徑集合中k條歷史無人機采集路徑相互平行且任意兩條相鄰的歷史無人機采集路徑的間隔距離相同,k為大于等于1整數,然后基于目標城市的k條歷史無人機采集路徑的k個環境參數和無人機的型號參數,確定進行圖像采集時相鄰兩條歷史無人機采集路徑的無人機視野的重疊區域,獲得k-1個路徑交互對抗區域,進而獲取無人機的預設采樣間隔和預設行駛速度,結合k-1個路徑交互對抗區域的k-1個區域長度,對k-1個路徑交互對抗區域進行劃分,獲得k-1個交互對抗子區域集合,然后以k-1個交互對抗子區域集合為索引,對歷史城市三維模型進行紋理貼圖文件進行檢索,并對檢索結果進行圖像分辨率和重疊率分析,確定k-1個模糊區域集合,其中,k-1個模糊區域集合包括k-1個模糊度集合,對k-1個模糊度集合進行模糊度集中補償分析,確定集中待補償模糊度,然后采集構建歷史城市三維模型的歷史無人機飛行參數集合,根據集中待補償模糊度對歷史無人機飛行參數集合進行優化,確定優化無人機飛行參數集合,然后基于無人機飛行參數集合對無人機進行控制,按照歷史無人機采集路徑集合進行k-1個模糊區域集合的圖像采集,并根據采集結果進行三維建模,根據建模結果對歷史城市三維模型進行補償更新,獲得目標補償城市三維模型。達到了對城市三維模型中模糊區域和模糊程度進行高效識別,進而提高補償建模的準確性和效率的技術效果。
技術特征:
1.一種結合圖像識別的城市補償建模方法,其特征在于,所述方法包括:
2.如權利要求1所述的一種結合圖像識別的城市補償建模方法,其特征在于,以所述k-1個交互對抗子區域集合為索引,對所述歷史城市三維模型進行紋理貼圖文件進行檢索,并對檢索結果進行圖像分辨率和重疊率分析,確定k-1個模糊區域集合,包括:
3.如權利要求2所述的一種結合圖像識別的城市補償建模方法,其特征在于,包括:
4.如權利要求1所述的一種結合圖像識別的城市補償建模方法,其特征在于,對所述k-1個模糊度集合進行模糊度集中補償分析,確定集中待補償模糊度,包括:
5.如權利要求4所述的一種結合圖像識別的城市補償建模方法,其特征在于,按照所述預設迭代步長對所述中心分析鄰域進行迭代擴充,獲得目標分析鄰域,包括:
6.如權利要求5所述的一種結合圖像識別的城市補償建模方法,其特征在于,包括:
7.如權利要求1所述的一種結合圖像識別的城市補償建模方法,其特征在于,獲取無人機的預設采樣間隔和預設行駛速度,結合所述k-1個路徑交互對抗區域的k-1個區域長度,對所述k-1個路徑交互對抗區域進行劃分,獲得k-1個交互對抗子區域集合,包括:
8.一種結合圖像識別的城市補償建模系統,其特征在于,所述系統用于實施權利要求1-7任一項所述的一種結合圖像識別的城市補償建模方法,所述系統包括:
技術總結
本發明公開了一種結合圖像識別的城市補償建模方法及系統,涉及城市補償建模技術領域,該方法包括:獲取目標城市的歷史城市三維模型和歷史無人機采集路徑集合;獲得K?1個路徑交互對抗區域;獲得K?1個交互對抗子區域集合;確定K?1個模糊區域集合;確定集中待補償模糊度;確定優化無人機飛行參數集合;按照歷史無人機采集路徑集合進行K?1個模糊區域集合的圖像采集,并根據采集結果進行三維建模,根據建模結果對歷史城市三維模型進行補償更新,獲得目標補償城市三維模型。本發明解決了現有技術中城市補償建模準確性低,補償建模效率低的技術問題,達到了提升城市補償建模可靠性,提高建模質量的技術效果。
技術研發人員:歐陽健,王平,張春林,張雪嬌,王靖
受保護的技術使用者:重慶大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!