一種車輛異常駕駛行為識別方法、裝置和電子設備
本發明涉及智能交通和汽車管理,尤其涉及一種車輛異常駕駛行為識別方法、裝置和電子設備。
背景技術:
1、自動駕駛技術的發展為人們帶來了新的出行方式,但車載感知傳感器性能限制導致了智能網聯汽車感知信息存在缺失和不精準等問題,難以分析和預測周圍車輛運動狀態,使得智能網聯汽車決策時依然可能存在問題,進而限制了智能網聯汽車的落地應用。車路協同環境能為車輛提供廣闊且多維度的感知能力,彌補車載感知的缺點,為自動駕駛落地提供新思路。但其也存在著交通場景數據時空同步難、數據異構、高復雜度等問題,難以分析和預測車輛運動狀態,難以為車輛決策提供支撐。深度學習和人工智能技術能夠有效地提取周圍車輛運動狀態特征和識別車輛駕駛行為,實現車輛運動軌跡預測,輔助智能網聯汽車的決策。
2、可靠的事故預測和積極的預防無疑是非常有益和必要的。事故的發生是一個復雜的機制,有許多促成因素。一般而言,在大多數碰撞事故中可以發現以駕駛員為中心的因素,而車輛駕駛行為評估是提高安全性和減少碰撞的重要方面。對異常駕駛行為的分類以及識別檢測是一個長期的探索。現已經開發了一系列特征來描述不安全行為,例如超速、突然制動或急動、追尾、頻繁和劇烈的變道、偏航等。通常,運動相關變量的統計分布圖被用作行為特征。為了進行可靠的駕駛評估,需要對特征進行深入、多視角的挖掘,尤其是具有可預測性的特征挖掘。
技術實現思路
1、有鑒于此,有必要提供一種車輛異常駕駛行為識別方法、裝置和電子設備,用以解決現有技術中沒有對特征進行深入、多視角的挖掘,進而建立車輛異常駕駛行為模型的技術問題。
2、為了解決上述問題,本發明提供一種車輛異常駕駛行為識別方法,包括:
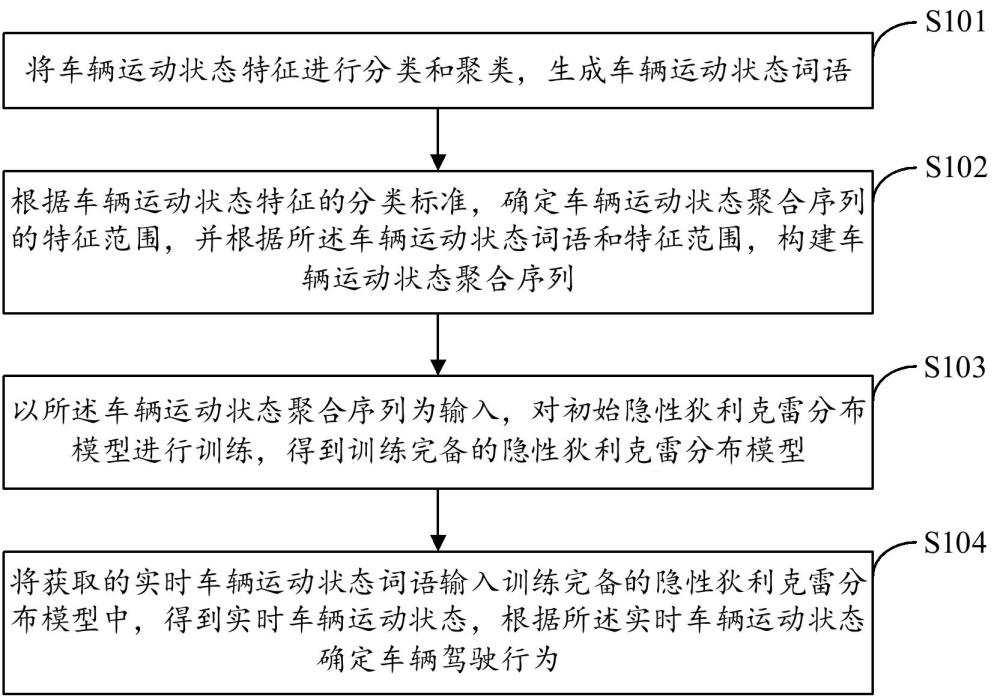
3、將車輛運動狀態特征進行分類和聚類,生成車輛運動狀態詞語;
4、根據車輛運動狀態特征的分類標準,確定車輛運動狀態聚合序列的特征范圍,并根據所述車輛運動狀態詞語和特征范圍,構建車輛運動狀態聚合序列;
5、以所述車輛運動狀態聚合序列為輸入,對初始隱性狄利克雷分布模型進行訓練,得到訓練完備的隱性狄利克雷分布模型;
6、將獲取的實時車輛運動狀態詞語輸入訓練完備的隱性狄利克雷分布模型中,得到實時車輛運動狀態,根據所述實時車輛運動狀態確定車輛駕駛行為。
7、在一種可能的實現方式中,所述車輛運動狀態特征包括速度、加速度、航向角、車道線偏離和障礙物情況;所述將車輛運動狀態特征進行分類和聚類,生成車輛運動狀態詞語,包括:
8、基于預設的池袋模型對車輛運動狀態特征進行編碼,得到車輛運動狀態特征對應的車輛運動狀態詞語。
9、在一種可能的實現方式中,所述根據車輛運動狀態特征的分類標準,確定車輛運動狀態聚合序列的特征范圍,包括:
10、根據每個車輛運動狀態特征對應的量化指標確定車輛運動狀態聚合序列的特征范圍。
11、在一種可能的實現方式中,在對所述初始隱性狄利克雷分布模型進行訓練之前,還包括:
12、定義車輛駕駛行為,其中所述車輛駕駛行為包括速度異常、加速度異常、變道異常和無異常;
13、根據標簽投影矩陣構建車輛運動狀態聚合序列與車輛駕駛行為之間的關聯關系。
14、在一種可能的實現方式中,所述以所述車輛運動狀態聚合序列為輸入,對初始隱性狄利克雷分布模型進行訓練,得到訓練完備的隱性狄利克雷分布模型,包括:
15、構建初始帶標簽的隱性狄利克雷分布模型;
16、根據車輛運動狀態聚合序列與車輛駕駛行為之間的關聯關系,對初始隱性狄利克雷分布模型進行訓練,得到訓練完備的隱性狄利克雷分布模型。
17、在一種可能的實現方式中,所述以所述車輛運動狀態聚合序列為輸入,對初始隱性狄利克雷分布模型進行訓練,還包括:
18、采用預設吉布斯采樣對車輛運動狀態聚合序列的訓練數據進行訓練和采樣。
19、在一種可能的實現方式中,所述根據所述實時車輛運動狀態確定車輛駕駛行為,包括:
20、基于車輛運動狀態聚合序列與車輛駕駛行為之間的關聯關系,根據實時車輛運動狀態確定車輛駕駛行為。
21、第二方面,本發明還提供一種車輛異常駕駛行為識別裝置,包括:
22、第一生成模塊,用于將車輛運動狀態特征進行分類和聚類,生成車輛運動狀態詞語;
23、聚合序列構建模塊,用于根據車輛運動狀態特征的分類標準,確定車輛運動狀態聚合序列的特征范圍,并根據所述車輛運動狀態詞語和特征范圍,構建車輛運動狀態聚合序列;
24、訓練模塊,用于以所述車輛運動狀態聚合序列為輸入,對初始隱性狄利克雷分布模型進行訓練,得到訓練完備的隱性狄利克雷分布模型;
25、駕駛行為確定模塊,用于將獲取的實時車輛運動狀態詞語輸入訓練完備的隱性狄利克雷分布模型中,得到實時車輛運動狀態,根據所述實時車輛運動狀態確定車輛駕駛行為。
26、第三方面,本發明還提供了一種電子設備,包括:處理器和存儲器;
27、所述存儲器上存儲有可被所述處理器執行的計算機可讀程序;
28、所述處理器執行所述計算機可讀程序時實現如上所述的車輛異常駕駛行為識別方法中的步驟。
29、第四方面,本發明還提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有一個或者多個程序,所述一個或者多個程序可被一個或者多個處理器執行,以實現如上所述的車輛異常駕駛行為識別方法中的步驟。
30、本發明的有益效果是:首先構建了車輛運動數據的詞袋模型,挖掘特征,識別車輛運動狀態序列的車輛駕駛行為。并根據歷史事件數據庫對駕駛行為進行先驗標簽標定,并提取其駕駛行為特征表征參數;根據駕駛場景全要素連續信息,通過詞袋模型對車輛當前駕駛行為進行編碼,并通過構建一種基于帶標簽的隱性狄利克雷分布的車輛駕駛行為識別模型,識別了速度異常、加減速異常、變道異常的異常車輛駕駛行為,運用帶標簽的隱性狄利克雷分布模型對其主題進行識別,判斷當前駕駛行為屬于哪一個類標簽。以達到識別城市道路中的車輛異常駕駛行為,為智能交通管理系統對車輛進行標識,提供管理方案。
技術特征:
1.一種車輛異常駕駛行為識別方法,其特征在于,包括:
2.根據權利要求1所述的車輛異常駕駛行為識別方法,其特征在于,所述車輛運動狀態特征包括速度、加速度、航向角、車道線偏離和障礙物情況;所述將車輛運動狀態特征進行分類和聚類,生成車輛運動狀態詞語,包括:
3.根據權利要求1所述的車輛異常駕駛行為識別方法,其特征在于,所述根據車輛運動狀態特征的分類標準,確定車輛運動狀態聚合序列的特征范圍,包括:
4.根據權利要求1所述的車輛異常駕駛行為識別方法,其特征在于,在對所述初始隱性狄利克雷分布模型進行訓練之前,還包括:
5.根據權利要求4所述的車輛異常駕駛行為識別方法,其特征在于,所述以所述車輛運動狀態聚合序列為輸入,對初始隱性狄利克雷分布模型進行訓練,得到訓練完備的隱性狄利克雷分布模型,包括:
6.根據權利要求4所述的車輛異常駕駛行為識別方法,其特征在于,所述以所述車輛運動狀態聚合序列為輸入,對初始隱性狄利克雷分布模型進行訓練,還包括:
7.根據權利要求4所述的車輛異常駕駛行為識別方法,其特征在于,所述根據所述實時車輛運動狀態確定車輛駕駛行為,包括:
8.一種車輛異常駕駛行為識別裝置,其特征在于,包括:
9.一種電子設備,其特征在于,包括:處理器和存儲器;
10.一種計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質存儲有一個或者多個程序,所述一個或者多個程序可被一個或者多個處理器執行,以實現如權利要求1-7任一項所述的車輛異常駕駛行為識別方法中的步驟。
技術總結
本發明涉及一種車輛異常駕駛行為識別方法、裝置和電子設備,屬于智能交通和汽車管理技術領域,該方法包括:將車輛運動狀態特征進行分類和聚類,生成車輛運動狀態詞語;根據車輛運動狀態特征的分類標準,確定車輛運動狀態聚合序列的特征范圍,并根據車輛運動狀態詞語和特征范圍,構建車輛運動狀態聚合序列;以車輛運動狀態聚合序列為輸入,對初始隱性狄利克雷分布模型進行訓練,得到訓練完備的隱性狄利克雷分布模型;將根據訓練完備的隱性狄利克雷分布模型,得到實時車輛運動狀態,根據實時車輛運動狀態確定車輛駕駛行為。本發明解決了現有技術中沒有對特征進行深入、多視角的挖掘,進而建立車輛異常駕駛行為模型的技術問題。
技術研發人員:陳志軍,吳鎧,熊盛光,酆磊,韓云香
受保護的技術使用者:武漢理工大學
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!