一種無人化測(cè)試遠(yuǎn)程駕駛系統(tǒng)的安全評(píng)估方法及系統(tǒng)與流程
本發(fā)明涉及遠(yuǎn)程駕駛,尤其是涉及一種無人化測(cè)試遠(yuǎn)程駕駛系統(tǒng)的安全評(píng)估方法及系統(tǒng)。
背景技術(shù):
1、伴隨著科學(xué)技術(shù)的蓬勃發(fā)展,近年來,自動(dòng)駕駛技術(shù)可謂百花齊放,然而,基于當(dāng)前的自動(dòng)駕駛技術(shù),仍然無法完全擺脫人工駕駛安全員的協(xié)助控制,即車端需要有人監(jiān)測(cè),特別是復(fù)雜的道路場(chǎng)景下,此時(shí)想要實(shí)現(xiàn)車端完全無人,遠(yuǎn)程駕駛技術(shù)是一種有效控制方案,在車端自動(dòng)自動(dòng)駕駛出現(xiàn)異常的情況下,通過遠(yuǎn)程接管控制車輛,擺脫困境。但是,為了確保遠(yuǎn)程駕駛行駛的安全性,一套可行有效的安全策略是當(dāng)下遠(yuǎn)程駕駛技術(shù)的發(fā)展的重要方向。
技術(shù)實(shí)現(xiàn)思路
1、鑒于以上問題,本發(fā)明提供了一種無人化測(cè)試遠(yuǎn)程駕駛系統(tǒng)的安全評(píng)估方法及系統(tǒng),不僅針對(duì)遠(yuǎn)程駕駛系統(tǒng)可能出現(xiàn)的風(fēng)險(xiǎn)問題,制定有效的安全策略,能夠確保遠(yuǎn)程駕駛接管前后車輛行駛的安全,而且自動(dòng)駕駛出現(xiàn)異常能夠及時(shí)介入,保證安全。
2、為了實(shí)現(xiàn)上述目的及其他相關(guān)目的,本發(fā)明提供的技術(shù)方案如下:
3、一種無人化測(cè)試遠(yuǎn)程駕駛系統(tǒng)的安全評(píng)估方法,所述方法包括:
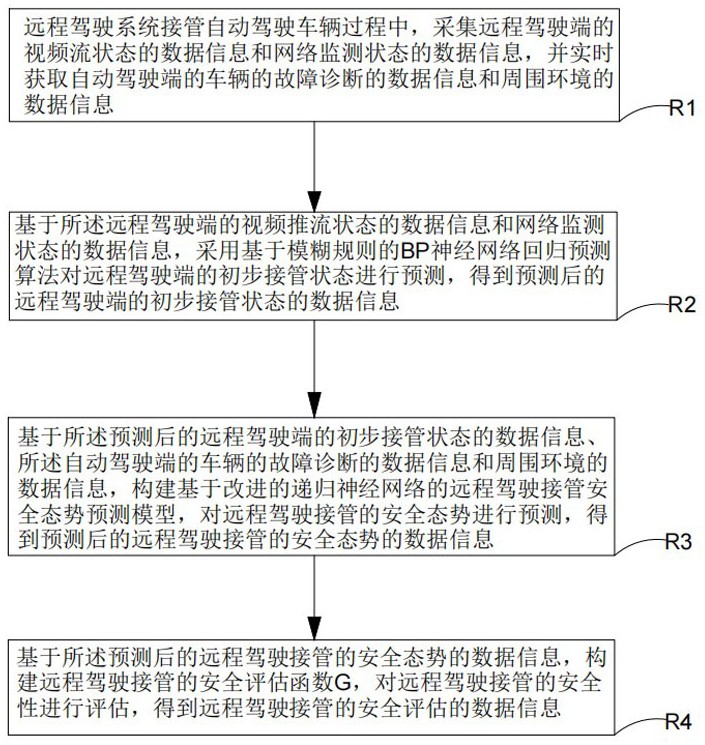
4、r1.遠(yuǎn)程駕駛系統(tǒng)接管自動(dòng)駕駛車輛過程中,采集遠(yuǎn)程駕駛端的視頻推流狀態(tài)的數(shù)據(jù)信息和網(wǎng)絡(luò)監(jiān)測(cè)狀態(tài)的數(shù)據(jù)信息,并實(shí)時(shí)獲取自動(dòng)駕駛端的車輛的故障診斷的數(shù)據(jù)信息和周圍環(huán)境的數(shù)據(jù)信息;
5、r2.基于所述遠(yuǎn)程駕駛端的視頻推流狀態(tài)的數(shù)據(jù)信息和網(wǎng)絡(luò)監(jiān)測(cè)狀態(tài)的數(shù)據(jù)信息,采用基于模糊規(guī)則的bp神經(jīng)網(wǎng)絡(luò)回歸預(yù)測(cè)算法對(duì)遠(yuǎn)程駕駛端的初步接管狀態(tài)進(jìn)行預(yù)測(cè),得到預(yù)測(cè)后的遠(yuǎn)程駕駛端的初步接管狀態(tài)的數(shù)據(jù)信息;
6、r3.基于所述預(yù)測(cè)后的遠(yuǎn)程駕駛端的初步接管狀態(tài)的數(shù)據(jù)信息、所述自動(dòng)駕駛端的車輛的故障診斷的數(shù)據(jù)信息和周圍環(huán)境的數(shù)據(jù)信息,構(gòu)建基于改進(jìn)的遞歸神經(jīng)網(wǎng)絡(luò)的遠(yuǎn)程駕駛接管安全態(tài)勢(shì)預(yù)測(cè)模型,對(duì)遠(yuǎn)程駕駛接管的安全態(tài)勢(shì)進(jìn)行預(yù)測(cè),得到預(yù)測(cè)后的遠(yuǎn)程駕駛接管的安全態(tài)勢(shì)的數(shù)據(jù)信息;
7、r4.基于所述預(yù)測(cè)后的遠(yuǎn)程駕駛接管的安全態(tài)勢(shì)的數(shù)據(jù)信息,構(gòu)建遠(yuǎn)程駕駛接管的安全評(píng)估函數(shù)g,對(duì)遠(yuǎn)程駕駛接管的安全性進(jìn)行評(píng)估,得到遠(yuǎn)程駕駛接管的安全評(píng)估的數(shù)據(jù)信息。
8、進(jìn)一步的,所述方法還包括:
9、r5.基于所述遠(yuǎn)程駕駛接管的安全評(píng)估的數(shù)據(jù)信息,設(shè)置預(yù)設(shè)閾值,若遠(yuǎn)程駕駛接管的安全評(píng)估小于預(yù)設(shè)閾值則不滿足要求,無法進(jìn)行遠(yuǎn)程接管,若遠(yuǎn)程駕駛接管的安全評(píng)估大于預(yù)設(shè)閾值則滿足要求,進(jìn)行遠(yuǎn)程接管自動(dòng)駕駛車輛。
10、進(jìn)一步的,在步驟r2中,所述采用基于模糊規(guī)則的bp神經(jīng)網(wǎng)絡(luò)回歸預(yù)測(cè)算法對(duì)遠(yuǎn)程駕駛端的初步接管狀態(tài)進(jìn)行預(yù)測(cè)包括:
11、r21.基于所述遠(yuǎn)程駕駛端的視頻推流狀態(tài)的數(shù)據(jù)信息和網(wǎng)絡(luò)監(jiān)測(cè)狀態(tài)的數(shù)據(jù)信息,建立遠(yuǎn)程駕駛端狀態(tài)模糊規(guī)則函數(shù)q,
12、
13、其中,x1為遠(yuǎn)程駕駛端的視頻推流狀態(tài)的數(shù)據(jù)信息,x2為遠(yuǎn)程駕駛端的網(wǎng)絡(luò)監(jiān)測(cè)狀態(tài)的數(shù)據(jù)信息,α1、α2和α3為遠(yuǎn)程駕駛端的狀態(tài)的模糊規(guī)則因子,對(duì)遠(yuǎn)程駕駛端的狀態(tài)的模糊規(guī)則矩陣進(jìn)行表征,得到遠(yuǎn)程駕駛端的狀態(tài)的模糊規(guī)則矩陣的數(shù)據(jù)信息;
14、r22.將所述遠(yuǎn)程駕駛端的狀態(tài)的模糊規(guī)則矩陣的數(shù)據(jù)信息輸入bp神經(jīng)網(wǎng)絡(luò)回歸預(yù)測(cè)模型進(jìn)行訓(xùn)練和學(xué)習(xí),確定模型的預(yù)測(cè)函數(shù)w,
15、其中,y為遠(yuǎn)程駕駛端的狀態(tài)的模糊規(guī)則矩陣的數(shù)據(jù)信息,β1、β2和β3為模型的預(yù)測(cè)的懲罰因子,得到訓(xùn)練好的bp神經(jīng)網(wǎng)絡(luò)回歸預(yù)測(cè)模型;
16、r23.基于所述訓(xùn)練好的bp神經(jīng)網(wǎng)絡(luò)回歸預(yù)測(cè)模型,輸入所述遠(yuǎn)程駕駛端的狀態(tài)的模糊規(guī)則矩陣的數(shù)據(jù)信息,對(duì)遠(yuǎn)程駕駛端的初步接管狀態(tài)進(jìn)行預(yù)測(cè),得到預(yù)測(cè)后的遠(yuǎn)程駕駛端的初步接管狀態(tài)的數(shù)據(jù)信息。
17、進(jìn)一步的,所述模糊的預(yù)測(cè)的懲罰因子β1、β2和β3為,
18、
19、
20、其中,y為遠(yuǎn)程駕駛端的狀態(tài)的模糊規(guī)則矩陣的數(shù)據(jù)信息。
21、進(jìn)一步的,所述遠(yuǎn)程駕駛端的狀態(tài)的模糊規(guī)則因子α1、α2和α3為,
22、
23、其中,x1為遠(yuǎn)程駕駛端的視頻推流狀態(tài)的數(shù)據(jù)信息,x2為遠(yuǎn)程駕駛端的網(wǎng)絡(luò)監(jiān)測(cè)狀態(tài)的數(shù)據(jù)信息。
24、進(jìn)一步的,在步驟r3中,所述構(gòu)建基于改進(jìn)的遞歸神經(jīng)網(wǎng)絡(luò)的遠(yuǎn)程駕駛接管安全態(tài)勢(shì)預(yù)測(cè)模型,對(duì)遠(yuǎn)程駕駛接管的安全態(tài)勢(shì)進(jìn)行預(yù)測(cè)包括:
25、r31.基于所述預(yù)測(cè)后的遠(yuǎn)程駕駛端的初步接管狀態(tài)的數(shù)據(jù)信息、所述自動(dòng)駕駛端的車輛的故障診斷的數(shù)據(jù)信息和周圍環(huán)境的數(shù)據(jù)信息,建立遞歸神經(jīng)網(wǎng)絡(luò)的時(shí)間序列函數(shù)p,
26、
27、其中,z1為預(yù)測(cè)后的遠(yuǎn)程駕駛端的初步接管狀態(tài)的數(shù)據(jù)信息,z2為自動(dòng)駕駛端的車輛的故障診斷的數(shù)據(jù)信息,z3為自動(dòng)駕駛端的車輛的周圍環(huán)境的數(shù)據(jù)信息,δ1、δ2和δ3為遞歸神經(jīng)網(wǎng)絡(luò)的時(shí)間序列的權(quán)重因子,對(duì)遠(yuǎn)程駕駛端接管車輛的時(shí)間序列進(jìn)行表征,得到遠(yuǎn)程駕駛端接管車輛的時(shí)間序列的數(shù)據(jù)信息;
28、r32.將所述遠(yuǎn)程駕駛端接管車輛的時(shí)間序列的數(shù)據(jù)信息輸入遠(yuǎn)程駕駛接管安全態(tài)勢(shì)預(yù)測(cè)模型進(jìn)行訓(xùn)練和學(xué)習(xí),確定遠(yuǎn)程駕駛接管安全態(tài)勢(shì)預(yù)測(cè)函數(shù)s,
29、
30、其中,r為遠(yuǎn)程接管車輛的時(shí)間序列的數(shù)據(jù)信息,γ1、γ2和γ3為遠(yuǎn)程駕駛接管安全態(tài)勢(shì)的獎(jiǎng)勵(lì)因子,得到訓(xùn)練好的遠(yuǎn)程駕駛接管安全態(tài)勢(shì)預(yù)測(cè)模型;
31、r33.基于所述訓(xùn)練好的遠(yuǎn)程駕駛接管安全態(tài)勢(shì)預(yù)測(cè)模型,輸入所述遠(yuǎn)程駕駛端接管車輛的時(shí)間序列的數(shù)據(jù)信息,對(duì)遠(yuǎn)程駕駛接管的安全態(tài)勢(shì)進(jìn)行預(yù)測(cè),得到預(yù)測(cè)后的遠(yuǎn)程駕駛接管的安全態(tài)勢(shì)的數(shù)據(jù)信息。
32、進(jìn)一步的,所述遠(yuǎn)程駕駛接管安全態(tài)勢(shì)的獎(jiǎng)勵(lì)因子γ1、γ2和γ3的約束條件為,
33、
34、進(jìn)一步的,所述遠(yuǎn)程駕駛接管的安全評(píng)估函數(shù)g為,
35、
36、其中,h為預(yù)測(cè)后的遠(yuǎn)程駕駛接管的安全態(tài)勢(shì)的數(shù)據(jù)信息,η1、η2和η3為遠(yuǎn)程駕駛接管的安全評(píng)估因子。
37、為了實(shí)現(xiàn)上述目的及其他相關(guān)目的,本發(fā)明還提供了一種無人化測(cè)試遠(yuǎn)程駕駛系統(tǒng)的安全評(píng)估系統(tǒng),包括計(jì)算機(jī)設(shè)備,該計(jì)算機(jī)設(shè)備被編程或配置以執(zhí)行任意一項(xiàng)所述的無人化測(cè)試遠(yuǎn)程駕駛系統(tǒng)的安全評(píng)估方法的步驟。
38、為了實(shí)現(xiàn)上述目的及其他相關(guān)目的,本發(fā)明還提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),該計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)上存儲(chǔ)有被編程或配置以執(zhí)行任意一項(xiàng)所述的無人化測(cè)試遠(yuǎn)程駕駛系統(tǒng)的安全評(píng)估方法的計(jì)算機(jī)程序。
39、本發(fā)明具有以下積極效果:
40、1.本發(fā)明通過采用基于模糊規(guī)則的bp神經(jīng)網(wǎng)絡(luò)回歸預(yù)測(cè)算法對(duì)遠(yuǎn)程駕駛端的初步接管狀態(tài)進(jìn)行預(yù)測(cè),并結(jié)合構(gòu)建基于改進(jìn)的遞歸神經(jīng)網(wǎng)絡(luò)的遠(yuǎn)程駕駛接管安全態(tài)勢(shì)預(yù)測(cè)模型,對(duì)遠(yuǎn)程駕駛接管的安全態(tài)勢(shì)進(jìn)行預(yù)測(cè),不僅針對(duì)遠(yuǎn)程駕駛系統(tǒng)可能出現(xiàn)的風(fēng)險(xiǎn)問題,制定有效的安全策略,能夠確保遠(yuǎn)程駕駛接管前后車輛行駛的安全,而且自動(dòng)駕駛出現(xiàn)異常能夠及時(shí)介入,保證安全。
41、2.本發(fā)明通過構(gòu)建遠(yuǎn)程駕駛接管的安全評(píng)估函數(shù)g,對(duì)遠(yuǎn)程駕駛接管的安全性進(jìn)行評(píng)估,不僅能夠進(jìn)一步的保證遠(yuǎn)程駕駛接管自動(dòng)駕駛車輛的安全性和可靠性,而且可以實(shí)現(xiàn)車輛的無人化安全測(cè)試或運(yùn)營。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!