工業(yè)終端的測試系統(tǒng)、方法、設(shè)備及介質(zhì)與流程
本技術(shù)涉及工業(yè)測試,尤其涉及一種工業(yè)終端的測試系統(tǒng)、方法、設(shè)備及介質(zhì)。
背景技術(shù):
1、隨著移動(dòng)通信技術(shù)的廣泛應(yīng)用,在工業(yè)領(lǐng)域中,移動(dòng)通信技術(shù)為工業(yè)自動(dòng)化、智能制造等場景提供了技術(shù)支撐,推動(dòng)工業(yè)自動(dòng)化和智能化的發(fā)展。
2、目前,工業(yè)終端的測試系統(tǒng)通過接收用戶輸入的物理信息和業(yè)務(wù)關(guān)系信息,模擬工業(yè)終端之間的數(shù)據(jù)交互,生成測試數(shù)據(jù)流量,進(jìn)行特定的測試場景模擬和性能測試,提供終端的性能評定。
3、然而,由于工業(yè)環(huán)境復(fù)雜,現(xiàn)有的工業(yè)終端測試系統(tǒng)難以滿足復(fù)雜工業(yè)環(huán)境下的測試需求;在不同仿真測試任務(wù)和環(huán)境條件下,傳統(tǒng)方法難以調(diào)整儀器參數(shù),造成仿真測試結(jié)果與實(shí)際工業(yè)場景的偏差。
技術(shù)實(shí)現(xiàn)思路
1、本技術(shù)實(shí)施例提供的工業(yè)終端的測試系統(tǒng)、方法、設(shè)備及介質(zhì),提高了仿真測試的適應(yīng)性和準(zhǔn)確性,減少了因環(huán)境變化導(dǎo)致的誤差,提高了測試精度和穩(wěn)定性。
2、第一方面,本技術(shù)實(shí)施例提供一種工業(yè)終端的測試系統(tǒng),包括:
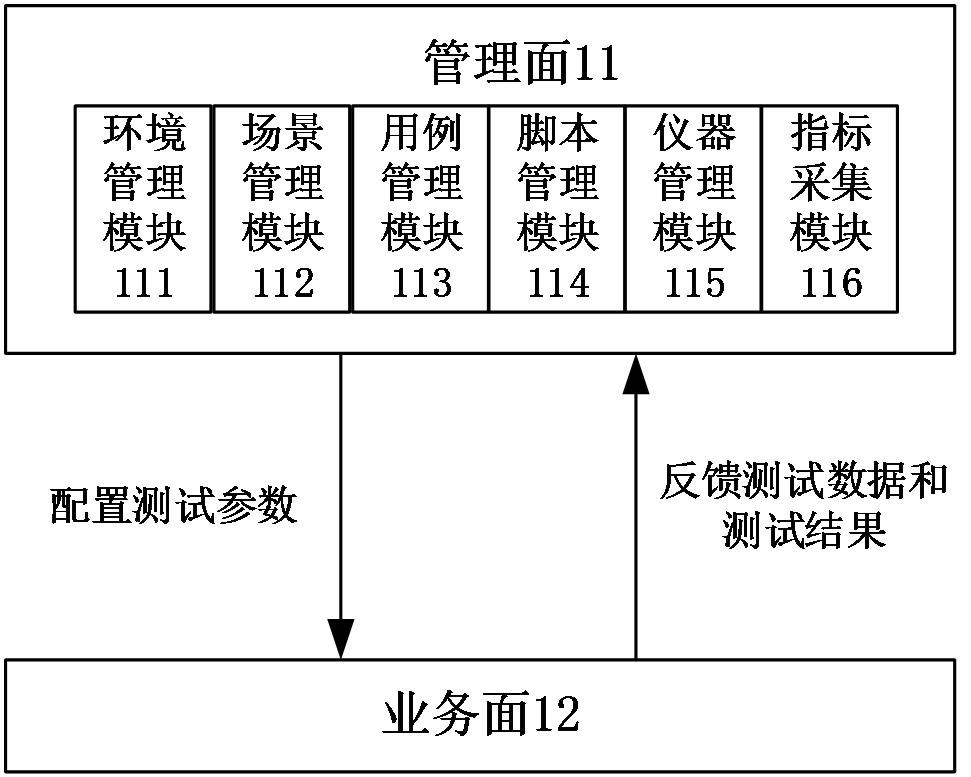
3、管理面和業(yè)務(wù)面,所述管理面與所述業(yè)務(wù)面連接;
4、所述管理面,用于配置所述業(yè)務(wù)面的測試參數(shù),所述測試參數(shù)包括測試環(huán)境、測試場景、測試用例、測試腳本;
5、所述業(yè)務(wù)面,用于基于所述測試參數(shù),對工業(yè)終端進(jìn)行測試,采集測試數(shù)據(jù)并進(jìn)行分析,得到測試結(jié)果,并將所述測試數(shù)據(jù)和測試結(jié)果反饋至所述管理面;
6、其中,所述管理面包括:環(huán)境管理模塊、場景管理模塊、用例管理模塊、腳本管理模塊、儀器管理模塊以及指標(biāo)采集模塊;
7、所述環(huán)境管理模塊,用于配置基礎(chǔ)環(huán)境參數(shù);
8、所述場景管理模塊,用于根據(jù)測試任務(wù)和業(yè)務(wù)面實(shí)時(shí)監(jiān)測到的多個(gè)維度的測試數(shù)據(jù),確定最優(yōu)場景參數(shù);
9、所述用例管理模塊,用于測試用例管理;
10、所述腳本管理模塊,用于測試腳本管理;
11、所述儀器管理模塊,用于實(shí)時(shí)調(diào)整和記錄測試儀器的儀器參數(shù);
12、所述指標(biāo)采集模塊,用于接收業(yè)務(wù)面發(fā)送的測試數(shù)據(jù)和測試結(jié)果。
13、在一種可能的實(shí)施方式中,所述業(yè)務(wù)面包括第一工控機(jī)、工業(yè)終端、測試儀器和第二工控機(jī);
14、所述第一工控機(jī)與所述第二工控機(jī)均與所述管理面連接,所述第一工控機(jī),用于接收所述管理面下發(fā)的測試用例和測試腳本,以及反饋測試數(shù)據(jù)及測試結(jié)果;
15、所述第二工控機(jī),用于配置測試環(huán)境、測試場景以及儀器參數(shù);
16、所述測試儀器通過所述工業(yè)終端與所述第一工控機(jī)以及所述第二工控機(jī)連接,用于基于所述測試用例和測試腳本,對所述工業(yè)終端進(jìn)行測試處理。
17、第二方面,本技術(shù)實(shí)施例提供一種工業(yè)終端的測試方法,包括:
18、管理面基于測試任務(wù),確定測試參數(shù),并配置業(yè)務(wù)面的測試參數(shù),所述測試參數(shù)包括測試環(huán)境、測試場景、測試用例、測試腳本;
19、業(yè)務(wù)面根據(jù)所述測試參數(shù),對工業(yè)終端進(jìn)行測試,并采集測試數(shù)據(jù);
20、業(yè)務(wù)面對所述測試數(shù)據(jù)進(jìn)行數(shù)據(jù)分析,得到測試結(jié)果。
21、在一種可能的實(shí)施方式中,測試數(shù)據(jù)包括多個(gè)維度的反饋數(shù)據(jù),所述測試任務(wù)包括多個(gè)測試子任務(wù),所述管理面基于所述測試任務(wù),確定場景參數(shù),并配置業(yè)務(wù)面的測試場景,包括:
22、針對所述多個(gè)測試子任務(wù)中的任意一個(gè)測試子任務(wù),場景管理模塊生成對應(yīng)的初始參數(shù)群集,所述初始參數(shù)群集包括多個(gè)場景參數(shù)和每個(gè)場景參數(shù)對應(yīng)的權(quán)重;
23、基于業(yè)務(wù)面實(shí)時(shí)監(jiān)測到的所述多個(gè)維度的反饋數(shù)據(jù),對每個(gè)場景參數(shù)進(jìn)行權(quán)重分析,并對每個(gè)場景參數(shù)對應(yīng)的權(quán)重進(jìn)行調(diào)整,所述維度用于指示反饋數(shù)據(jù)與所述場景參數(shù)之間的第一關(guān)聯(lián)關(guān)系;
24、基于所述調(diào)整后的權(quán)重,對所述初始參數(shù)群集進(jìn)行迭代優(yōu)化處理,直到所述初始參數(shù)群集收斂為止,將所述收斂的初始參數(shù)群集作為最優(yōu)參數(shù)集;
25、基于所述最優(yōu)參數(shù)集,確定測試場景,并配置業(yè)務(wù)面的測試場景。
26、在一種可能的實(shí)施方式中,基于業(yè)務(wù)面實(shí)時(shí)監(jiān)測到的所述多個(gè)維度的反饋數(shù)據(jù),對每個(gè)場景參數(shù)進(jìn)行權(quán)重分析,并對每個(gè)場景參數(shù)對應(yīng)的權(quán)重進(jìn)行調(diào)整,包括:
27、基于業(yè)務(wù)面實(shí)時(shí)監(jiān)測到的所述多個(gè)維度的反饋數(shù)據(jù),確定反饋矩陣;
28、針對所述多個(gè)維度的反饋數(shù)據(jù)中的任意一個(gè)維度的反饋數(shù)據(jù),計(jì)算所述反饋矩陣對于所述反饋數(shù)據(jù)的梯度;
29、根據(jù)所述梯度和第一學(xué)習(xí)率,對每個(gè)場景參數(shù)對應(yīng)的權(quán)重進(jìn)行調(diào)整,所述第一學(xué)習(xí)率用于控制權(quán)重調(diào)整幅度。
30、在一種可能的實(shí)施方式中,測試過程包括多個(gè)時(shí)間步,所述測試數(shù)據(jù)包括每個(gè)時(shí)間步對應(yīng)的測試儀器運(yùn)行狀態(tài)數(shù)據(jù),所述方法還包括:
31、基于所述測試任務(wù),用例管理模塊確定每個(gè)時(shí)間步對應(yīng)的測試目標(biāo);
32、儀器管理模塊根據(jù)業(yè)務(wù)面實(shí)時(shí)監(jiān)測到的所述每個(gè)時(shí)間步對應(yīng)的測試儀器運(yùn)行狀態(tài)數(shù)據(jù),確定所述測試儀器在每個(gè)時(shí)間步對應(yīng)的實(shí)際輸出;
33、將所述每個(gè)時(shí)間步對應(yīng)的測試目標(biāo)和實(shí)際輸出的差,作為每個(gè)時(shí)間步對應(yīng)的誤差,并計(jì)算對應(yīng)的誤差變化率,所述誤差和誤差變化率用于指示測試儀器實(shí)際輸出與目標(biāo)輸出之間的偏差,所述誤差變化率為所述誤差隨時(shí)間的變化率;
34、根據(jù)所述誤差及對應(yīng)的第二學(xué)習(xí)率、誤差變化率及對應(yīng)的第三學(xué)習(xí)率,對儀器參數(shù)進(jìn)行實(shí)時(shí)調(diào)整,所述第二學(xué)習(xí)率用于控制誤差對儀器參數(shù)調(diào)整的影響,所述第三學(xué)習(xí)率用于控制誤差變化率對儀器參數(shù)調(diào)整的影響。
35、在一種可能的實(shí)施方式中,該方法還包括:
36、儀器管理模塊確定初始第二學(xué)習(xí)率和初始第三學(xué)習(xí)率;
37、通過初始第二學(xué)習(xí)率、第一反饋參數(shù)調(diào)整所述第二學(xué)習(xí)率;
38、通過初始第三學(xué)習(xí)率、第二反饋參數(shù)調(diào)整所述第三學(xué)習(xí)率,其中,所述第一反饋參數(shù)、第二反饋參數(shù)分別用于控制所述誤差、誤差變化率的調(diào)整速度。
39、在一種可能的實(shí)施方式中,該方法還包括:
40、針對所述多個(gè)維度的反饋數(shù)據(jù)中的任意一個(gè)維度的反饋數(shù)據(jù),儀器管理模塊確定所述反饋數(shù)據(jù)在其他維度的相關(guān)反饋數(shù)據(jù),并確定與所述反饋數(shù)據(jù)之間的第二關(guān)聯(lián)關(guān)系;
41、基于所述第二關(guān)聯(lián)關(guān)系,對所述反饋數(shù)據(jù)和相關(guān)反饋數(shù)據(jù)進(jìn)行聯(lián)合處理,并基于聯(lián)合處理后的關(guān)聯(lián)反饋數(shù)據(jù),對每個(gè)場景參數(shù)對應(yīng)的權(quán)重進(jìn)行調(diào)整。
42、第三方面,本技術(shù)實(shí)施例提供一種工業(yè)終端的測試設(shè)備,包括:存儲(chǔ)器,處理器;
43、所述存儲(chǔ)器存儲(chǔ)計(jì)算機(jī)執(zhí)行指令;
44、所述處理器執(zhí)行所述存儲(chǔ)器存儲(chǔ)的計(jì)算機(jī)執(zhí)行指令,使得所述處理器執(zhí)行如上第二方面和/或第二方面各種可能的實(shí)施方式。
45、第四方面,本技術(shù)實(shí)施例提供一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)中存儲(chǔ)有計(jì)算機(jī)執(zhí)行指令,所述計(jì)算機(jī)執(zhí)行指令被處理器執(zhí)行時(shí)用于實(shí)現(xiàn)如上第二方面和/或第二方面各種可能的實(shí)施方式。
46、第五方面,本技術(shù)實(shí)施例提供一種計(jì)算機(jī)程序產(chǎn)品,包括計(jì)算機(jī)程序,該計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)如上第二方面和/或第二方面各種可能的實(shí)施方式。
47、本技術(shù)實(shí)施例提供的工業(yè)終端的測試系統(tǒng)、方法、設(shè)備及介質(zhì),通過該系統(tǒng)的場景管理模塊,依據(jù)業(yè)務(wù)面實(shí)時(shí)監(jiān)測到的多個(gè)維度的測試數(shù)據(jù),在動(dòng)態(tài)變化的環(huán)境中,確定最優(yōu)場景參數(shù),提高仿真測試的適應(yīng)性和準(zhǔn)確性;還通過該系統(tǒng)的儀器管理模塊,實(shí)時(shí)調(diào)整和記錄測試儀器的儀器參數(shù),使測試儀器能夠在復(fù)雜環(huán)境中保持穩(wěn)定運(yùn)行,減少因環(huán)境變化導(dǎo)致的誤差,提高了測試精度和穩(wěn)定性。
- 還沒有人留言評論。精彩留言會(huì)獲得點(diǎn)贊!