未知環境下基于拉東變換的飛行器自主著陸引導方法
本技術涉及單目視覺測量,特別是涉及一種未知環境下基于拉東變換的飛行器自主著陸引導方法。
背景技術:
1、隨著無人飛行器智能化發展,飛行器在不同領域中均展示出巨大的潛力和應用前景,其中飛行器的安全性和可靠性至關重要。當面對機械故障、惡劣天氣條件或強干擾等緊急情況時,飛行器需要及時進行著陸處置,最大程度地保護地面人員和機載設備,降低經濟損失。因此,飛行器自主著陸引導已經成為該領域的研究熱點,對飛行器智能化水平提出了更高的要求。飛行器與著陸區域之間的相對位姿測量是實現自主著陸引導的核心技術之一。當前飛行器自主著陸技術通常依賴全球定位系統、慣性導航傳感器、光電傳感器、雷達等設備,應用于固定機場等已知場景,針對未知場景尚缺乏有效的技術解決方案。
2、未知場景常見于緊急情況下,指不包括如特征點、描述子、基準圖、合作標志和三維模型等可用于飛行器引導自主著陸相對位姿測量的先驗信息。因此,傳統的全球定位系統、光電傳感器和雷達等手段不再滿足任務要求。機載單目相機憑借成本低、結構簡單、抗干擾能力強等特點被廣泛應用在飛行器自主著陸引導視覺位姿測量過程中,可以滿足未知場景下應急自主著陸任務需求。在具備合作標志或目標三維信息的已知場景中,機載單目相機通過提取目標區域圖像特征進而獲得飛行器與著陸區域之間的相對位姿關系,為控制系統提供參考。然而,這些方法在缺少先驗信息的未知場景中難以實現飛行器自主著陸。隨著單目相機對場景理解和感知技術的發展,在弱先驗信息或無先驗信息場景中,以單目視覺位姿測量為基礎的飛行器自主著陸引導技術得以實現。現有研究中,基于視覺的未知場景下飛行器自主著陸引導方法主要分為直接圖像檢測方法和場景三維重建方法。直接圖像檢測方法利用目標場景中紋理和幾何等信息學習到語義特征來確定最優適降區域。然而,這類方法關注于場景二維信息,不足以判斷復雜的三維地形信息,難以提供可靠的相對位姿信息。相比于直接檢測方法,場景三維重建策略應用更為廣泛。盡管著陸環境復雜且差異性大,對于適降區域搜索任務,重建后的點云數據可以進一步提供高精度的三維地形信息。然而,由于三維重建任務對圖像視角和數量有較高要求,并且密集點云文件提高了計算復雜度,在緊急飛行器自主著陸中往往難以實時測量。已有的未知場景中飛行器自主著陸實踐中,研究者通過地形條件來搜索安全的著陸點并引導飛行器著陸,但這些工作研究對象往往為旋翼飛行器。相比旋翼飛行器可以在面積較小、地形要求低的區域著陸,固定翼飛行器對著陸區域的要求更為苛刻,在滿足飛行器自身寬度要求的情況下,對著陸區域的長度和地面條件的測量準確性和魯棒性提出了更高的要求。現有的兩種策略都不能準確地、魯棒地實現未知場景中飛行器實時自主著陸視覺引導任務。
技術實現思路
1、基于此,有必要針對上述技術問題,提供一種未知環境下基于拉東變換的飛行器自主著陸引導方法。
2、一種未知環境下基于拉東變換的飛行器自主著陸引導方法,所述方法包括:
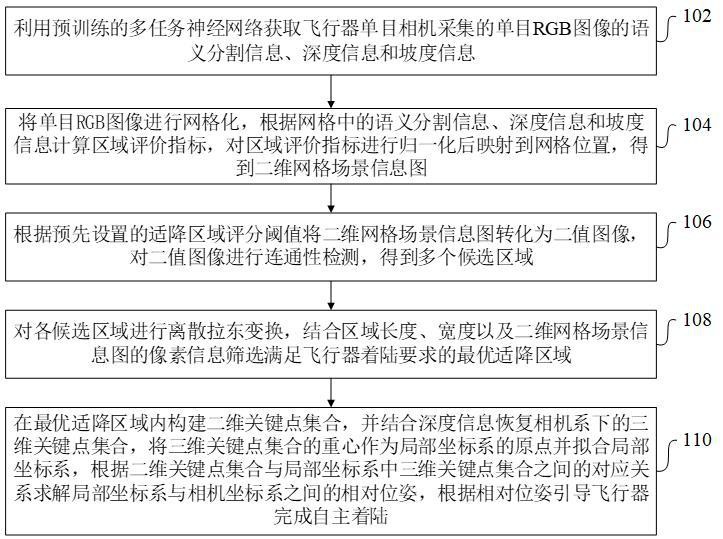
3、利用預訓練的多任務神經網絡獲取飛行器單目相機采集的單目rgb圖像的語義分割信息、深度信息和坡度信息;
4、將所述單目rgb圖像進行網格化,根據網格中的語義分割信息、深度信息和坡度信息計算區域評價指標,對區域評價指標進行歸一化后映射到網格位置,得到二維網格場景信息圖;
5、根據預先設置的適降區域評分閾值將所述二維網格場景信息圖轉化為二值圖像,對所述二值圖像進行連通性檢測,得到多個候選區域;
6、對各候選區域進行離散拉東變換,結合區域長度、寬度以及二維網格場景信息圖的像素信息篩選滿足飛行器著陸要求的最優適降區域;
7、在最優適降區域內構建二維關鍵點集合,并結合深度信息恢復相機系下的三維關鍵點集合,將三維關鍵點集合的重心作為局部坐標系的原點并擬合局部坐標系,根據二維關鍵點集合與局部坐標系中三維關鍵點集合之間的對應關系求解局部坐標系與相機坐標系之間的相對位姿,根據所述相對位姿引導飛行器完成自主著陸。
8、一種未知環境下基于拉東變換的飛行器自主著陸引導裝置,所述裝置包括:
9、三維信息提取模塊,用于利用預訓練的多任務神經網絡獲取飛行器單目相機采集的單目rgb圖像的語義分割信息、深度信息和坡度信息;
10、場景信息圖構建模塊,用于將所述單目rgb圖像進行網格化,根據網格中的語義分割信息、深度信息和坡度信息計算區域評價指標,對區域評價指標進行歸一化后映射到網格位置,得到二維網格場景信息圖;
11、候選區域獲取模塊,用于根據預先設置的適降區域評分閾值將所述二維網格場景信息圖轉化為二值圖像,對所述二值圖像進行連通性檢測,得到多個候選區域;
12、最優適降區域篩選模塊,用于對各候選區域進行離散拉東變換,結合區域長度、寬度以及二維網格場景信息圖的像素信息篩選滿足飛行器著陸要求的最優適降區域;
13、自主著陸引導模塊,用于在最優適降區域內構建二維關鍵點集合,并結合深度信息恢復相機系下的三維關鍵點集合,將三維關鍵點集合的重心作為局部坐標系的原點并擬合局部坐標系,根據二維關鍵點集合與局部坐標系中三維關鍵點集合之間的對應關系求解局部坐標系與相機坐標系之間的相對位姿,根據所述相對位姿引導飛行器完成自主著陸。
14、一種計算機設備,包括存儲器和處理器,所述存儲器存儲有計算機程序,所述處理器執行所述計算機程序時實現以下步驟:
15、利用預訓練的多任務神經網絡獲取飛行器單目相機采集的單目rgb圖像的語義分割信息、深度信息和坡度信息;
16、將所述單目rgb圖像進行網格化,根據網格中的語義分割信息、深度信息和坡度信息計算區域評價指標,對區域評價指標進行歸一化后映射到網格位置,得到二維網格場景信息圖;
17、根據預先設置的適降區域評分閾值將所述二維網格場景信息圖轉化為二值圖像,對所述二值圖像進行連通性檢測,得到多個候選區域;
18、對各候選區域進行離散拉東變換,結合區域長度、寬度以及二維網格場景信息圖的像素信息篩選滿足飛行器著陸要求的最優適降區域;
19、在最優適降區域內構建二維關鍵點集合,并結合深度信息恢復相機系下的三維關鍵點集合,將三維關鍵點集合的重心作為局部坐標系的原點并擬合局部坐標系,根據二維關鍵點集合與局部坐標系中三維關鍵點集合之間的對應關系求解局部坐標系與相機坐標系之間的相對位姿,根據所述相對位姿引導飛行器完成自主著陸。
20、一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現以下步驟:
21、利用預訓練的多任務神經網絡獲取飛行器單目相機采集的單目rgb圖像的語義分割信息、深度信息和坡度信息;
22、將所述單目rgb圖像進行網格化,根據網格中的語義分割信息、深度信息和坡度信息計算區域評價指標,對區域評價指標進行歸一化后映射到網格位置,得到二維網格場景信息圖;
23、根據預先設置的適降區域評分閾值將所述二維網格場景信息圖轉化為二值圖像,對所述二值圖像進行連通性檢測,得到多個候選區域;
24、對各候選區域進行離散拉東變換,結合區域長度、寬度以及二維網格場景信息圖的像素信息篩選滿足飛行器著陸要求的最優適降區域;
25、在最優適降區域內構建二維關鍵點集合,并結合深度信息恢復相機系下的三維關鍵點集合,將三維關鍵點集合的重心作為局部坐標系的原點并擬合局部坐標系,根據二維關鍵點集合與局部坐標系中三維關鍵點集合之間的對應關系求解局部坐標系與相機坐標系之間的相對位姿,根據所述相對位姿引導飛行器完成自主著陸。
26、上述未知環境下基于拉東變換的飛行器自主著陸引導方法,通過預訓練的多任務神經網絡,提取單目rgb圖像中的語義分割、深度和坡度信息,全面表征場景特性,為適降區域評估提供可靠數據支持,基于語義、平整度和坡度信息生成二維網格場景信息圖,實現對復雜場景的多維綜合表達,增強適降區域搜索的靈活性和準確性,利用離散拉東變換提取候選區域的線性特征,并結合區域的長度、寬度和像素信息,準確篩選出滿足飛行器著陸要求的最優適降區域,結合深度信息恢復三維關鍵點集合,計算相機坐標系與局部坐標系的相對位姿,解決單目視覺的尺度問題,實現高精度相對位姿測量。本發明實施例,顯著提升飛行器在未知場景中自主著陸引導的效率和可靠性,適應不同尺寸飛行器在復雜未知環境中實現安全自主著陸的需求。
- 還沒有人留言評論。精彩留言會獲得點贊!