基于激光雷達(dá)定位與傾角測斜的危巖運(yùn)動(dòng)監(jiān)測系統(tǒng)及方法
本發(fā)明涉及庫岸危巖崩塌監(jiān)測,特別是指一種基于激光雷達(dá)定位與傾角測斜的危巖運(yùn)動(dòng)監(jiān)測系統(tǒng)及方法。
背景技術(shù):
1、危巖崩塌是常見的地質(zhì)災(zāi)害之一,其成因復(fù)雜,分布廣泛,具有隱蔽性、突發(fā)性、致災(zāi)性等特征,致使早期有效預(yù)警一直難以實(shí)現(xiàn)。庫岸區(qū)危巖隱患早期識(shí)別、孕災(zāi)機(jī)制、監(jiān)測預(yù)警與治理,是學(xué)科前沿關(guān)注的熱點(diǎn)與難點(diǎn),同時(shí)也是行業(yè)的重大需求。危巖崩塌的早期預(yù)警技術(shù)一直是亟待解決的關(guān)鍵技術(shù)問題之一,而有效的早期預(yù)警依賴于配套的監(jiān)測裝備,因此迫切需要開發(fā)一種危巖監(jiān)測方法及裝置,對危巖運(yùn)動(dòng)姿態(tài)進(jìn)行監(jiān)測與預(yù)警。
2、現(xiàn)有技術(shù)中,常規(guī)的基于全球衛(wèi)星導(dǎo)航系統(tǒng)的靜態(tài)坐標(biāo)定位方法一方面解算時(shí)間較長,難以及時(shí)獲取到運(yùn)動(dòng)數(shù)據(jù),另一方面易受到雨水天氣影響,而危巖崩塌往往發(fā)生在連續(xù)暴雨天,致使定位精度存在較大的誤差,難以有效監(jiān)測危巖崩塌過程及早期預(yù)警。通過布設(shè)位移計(jì)進(jìn)行數(shù)據(jù)采集的方法雖然獲取了較高的精度,但局部的監(jiān)測無法實(shí)現(xiàn)危巖體整體運(yùn)動(dòng)姿態(tài)的解算,同時(shí)也存在地形適用性方面的限制。
技術(shù)實(shí)現(xiàn)思路
1、針對上述問題,本發(fā)明的目的在于提供一種基于激光雷達(dá)定位與傾角測斜的危巖運(yùn)動(dòng)監(jiān)測系統(tǒng)及方法,采用激光雷達(dá)測量距離,以及可重復(fù)使用的手持rtk測量儀對三個(gè)球形靶點(diǎn)的坐標(biāo)進(jìn)行一次定位,硬件設(shè)備造價(jià)較低,適合在庫岸危巖區(qū)域進(jìn)行大量布設(shè);能夠?qū)崟r(shí)獲取危巖測點(diǎn)的三維運(yùn)動(dòng)軌跡和傾角變化,具有對運(yùn)動(dòng)姿態(tài)實(shí)時(shí)呈現(xiàn)功能,從而實(shí)現(xiàn)庫岸危巖運(yùn)動(dòng)姿態(tài)的監(jiān)測及預(yù)警。
2、為解決上述技術(shù)問題,本發(fā)明提供如下技術(shù)方案:
3、一方面,提供了一種基于激光雷達(dá)定位與傾角測斜的危巖運(yùn)動(dòng)監(jiān)測系統(tǒng),所述系統(tǒng)包括:坐標(biāo)定位裝置、傾角測量裝置、供電裝置與監(jiān)測基站;
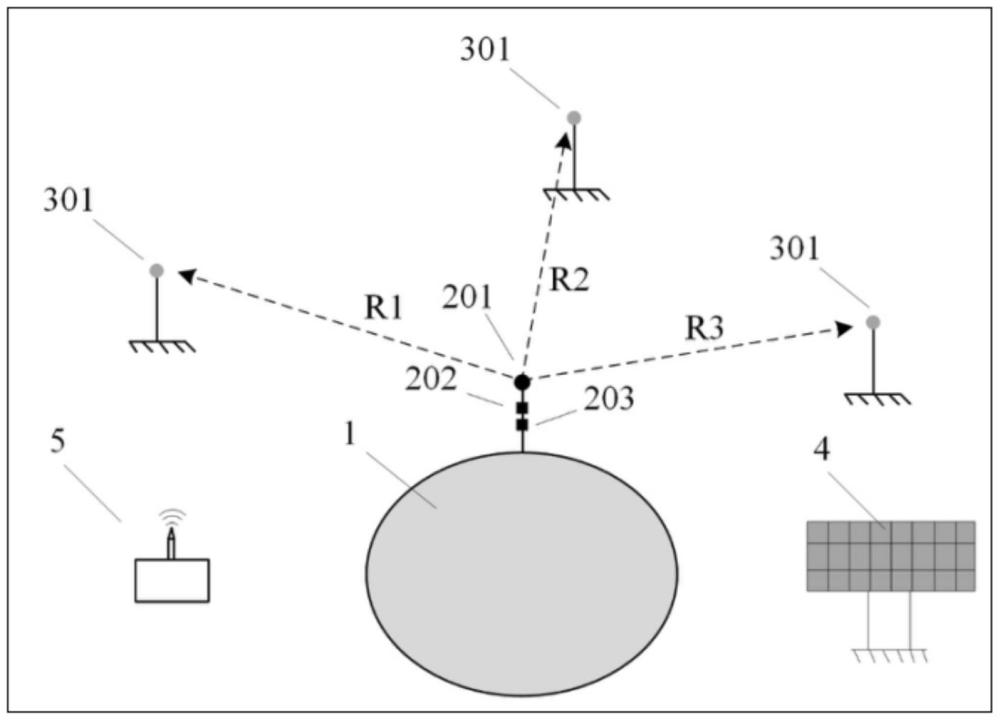
4、所述坐標(biāo)定位裝置包括布置在危巖測點(diǎn)的激光雷達(dá)、布置在危巖變形區(qū)域外的三個(gè)球形靶點(diǎn)、以及手持rtk測量儀;所述激光雷達(dá)用于測量危巖測點(diǎn)與三個(gè)球形靶點(diǎn)的距離,所述手持rtk測量儀用于定位三個(gè)球形靶點(diǎn)的球心三維坐標(biāo);
5、所述傾角測量裝置包括布置在危巖測點(diǎn)的傾角儀和加速度計(jì);所述傾角儀用于測量危巖測點(diǎn)的傾斜角,所述加速度計(jì)用于測量危巖測點(diǎn)的加速度;
6、所述供電裝置用于給所述坐標(biāo)定位裝置及所述傾角測量裝置供電;
7、所述監(jiān)測基站安裝后處理軟件,所述后處理軟件包括激光雷達(dá)數(shù)據(jù)處理模塊、運(yùn)動(dòng)姿態(tài)監(jiān)控模塊和預(yù)警模塊;
8、所述激光雷達(dá)數(shù)據(jù)處理模塊用于生成球形靶點(diǎn)的三維點(diǎn)云數(shù)據(jù),并根據(jù)三球面定位法解算出危巖測點(diǎn)的三維坐標(biāo);所述運(yùn)動(dòng)姿態(tài)監(jiān)控模塊用于根據(jù)不同時(shí)刻危巖測點(diǎn)的三維坐標(biāo)繪制運(yùn)動(dòng)軌跡,并結(jié)合測量的傾斜角生成危巖運(yùn)動(dòng)姿態(tài)模型;所述預(yù)警模塊用于根據(jù)危巖運(yùn)動(dòng)姿態(tài)模型計(jì)算出危巖的變形數(shù)據(jù),并將加速度、變形數(shù)據(jù)與預(yù)設(shè)閾值進(jìn)行對比,當(dāng)其中任意一項(xiàng)超出預(yù)設(shè)閾值時(shí)對危巖崩塌進(jìn)行預(yù)警。
9、可選地,所述激光雷達(dá)、所述傾角儀和所述加速度計(jì)安裝在第一支架上,所述第一支架包括萬向節(jié)、升降螺桿、緊固螺栓、支架下段、支架中段、支架上段、加勁板、固定板、基座、螺栓、調(diào)平螺帽、自攻螺絲、圓柱形銷釘;
10、所述激光雷達(dá)通過所述萬向節(jié)與所述升降螺桿連接,能夠?qū)崿F(xiàn)前、后、左、右轉(zhuǎn)動(dòng)調(diào)節(jié);所述激光雷達(dá)與所述萬向節(jié)通過所述圓柱形銷釘連接;所述激光雷達(dá)的輻射范圍能夠在危巖運(yùn)動(dòng)后仍然覆蓋所述球形靶點(diǎn);
11、所述升降螺桿的上端擰入所述萬向節(jié)下方的螺絲孔進(jìn)行固定;所述升降螺桿的下端擰進(jìn)所述支架上段的螺絲孔內(nèi),采用所述緊固螺栓進(jìn)行鎖定;單個(gè)或者多個(gè)所述支架中段將所述支架下段和所述支架上段連接;
12、所述支架下段底部設(shè)有所述固定板,并采用所述加勁板進(jìn)行加固;所述固定板通過所述螺栓與所述基座連接;所述螺栓在穿過所述固定板時(shí)上、下各布設(shè)一個(gè)所述調(diào)平螺帽,用于緊固和調(diào)平所述固定板;
13、所述傾角儀和所述加速度計(jì)采用所述自攻螺絲固定在所述支架下段。
14、可選地,所述球形靶點(diǎn)安裝在第二支架上,所述第二支架包括升降螺桿,所述球形靶點(diǎn)設(shè)有螺絲孔,所述升降螺桿擰入所述螺絲孔進(jìn)行固定;
15、所述球形靶點(diǎn)包括白色鋼球,所述白色鋼球能夠?qū)す膺M(jìn)行反射。
16、可選地,所述激光雷達(dá)搭載有測繪相機(jī),所述激光雷達(dá)生成三維點(diǎn)云數(shù)據(jù)后,所述測繪相機(jī)為所述三維點(diǎn)云數(shù)據(jù)實(shí)時(shí)著色,使監(jiān)測基站的后處理軟件能夠識(shí)別出所述三維點(diǎn)云數(shù)據(jù)中的球形靶點(diǎn);
17、所述激光雷達(dá)的掃描模式為重復(fù)掃描,水平視角為180°,垂直視角為75°,所述激光雷達(dá)的量程大于50?m,誤差小于2?mm;所述激光雷達(dá)采用無線電通信,搭載有無線發(fā)射器,無線頻率為2.4?ghz;
18、所述傾角儀測量x和y兩個(gè)方向的傾斜角,用于呈現(xiàn)危巖傾斜方向;所述傾角儀采用無線電通信,配有無線發(fā)射器,無線頻率為2.4ghz;
19、所述加速度計(jì)測量x和y兩個(gè)方向的運(yùn)動(dòng)加速度,用于獲取危巖運(yùn)動(dòng)狀態(tài);所述加速度計(jì)采用無線電通信,配有無線發(fā)射器,無線頻率為2.4ghz。
20、可選地,所述供電裝置為太陽能供電裝置,包括太陽能電池組、蓄電池、逆變器和控制器;
21、所述監(jiān)測基站包括無線接收器和pc端,所述無線接收器采用usb接口與所述pc端連接;
22、所述pc端安裝所述后處理軟件,所述后處理軟件二次開發(fā)一個(gè)插件,所述插件能夠識(shí)別出所述三維點(diǎn)云數(shù)據(jù)中的三個(gè)球形靶點(diǎn);所述激光雷達(dá)數(shù)據(jù)處理模塊根據(jù)三球面定位法解算出危巖測點(diǎn)的三維坐標(biāo);
23、所述運(yùn)動(dòng)姿態(tài)監(jiān)控模塊根據(jù)不同時(shí)刻危巖測點(diǎn)的三維坐標(biāo)繪制運(yùn)動(dòng)軌跡,結(jié)合測量的傾斜角生成危巖運(yùn)動(dòng)姿態(tài)模型,并實(shí)時(shí)呈現(xiàn);
24、所述預(yù)警模塊根據(jù)危巖運(yùn)動(dòng)姿態(tài)模型計(jì)算出危巖的變形數(shù)據(jù),并將加速度、變形數(shù)據(jù)與預(yù)設(shè)閾值對比,當(dāng)其中任意一項(xiàng)超出預(yù)設(shè)閾值時(shí)對危巖崩塌進(jìn)行預(yù)警。
25、另一方面,提供了一種基于激光雷達(dá)定位與傾角測斜的危巖運(yùn)動(dòng)監(jiān)測方法,所述方法基于上述任一項(xiàng)所述的系統(tǒng),所述方法包括以下步驟:
26、s1、在危巖測點(diǎn)布置激光雷達(dá)、傾角儀和加速度計(jì),并在危巖變形區(qū)域外布置三個(gè)球形靶點(diǎn);
27、s2、采用手持rtk測量儀定位三個(gè)球形靶點(diǎn)的球心三維坐標(biāo),并利用激光雷達(dá)測量危巖測點(diǎn)與每個(gè)球形靶點(diǎn)的距離,根據(jù)三球面定位法解算出危巖測點(diǎn)的三維坐標(biāo);
28、s3、利用傾角儀測量危巖測點(diǎn)的傾斜角,并利用加速度計(jì)測量危巖測點(diǎn)的加速度;
29、s4、根據(jù)不同時(shí)刻危巖測點(diǎn)的三維坐標(biāo)繪制運(yùn)動(dòng)軌跡,并結(jié)合測量的傾斜角生成危巖運(yùn)動(dòng)姿態(tài)模型;
30、s5、根據(jù)危巖運(yùn)動(dòng)姿態(tài)模型計(jì)算出危巖的變形數(shù)據(jù),將加速度、變形數(shù)據(jù)與預(yù)設(shè)閾值進(jìn)行對比,當(dāng)其中任意一項(xiàng)超出預(yù)設(shè)閾值時(shí)對危巖崩塌進(jìn)行預(yù)警。
31、可選地,所述步驟s1中,在現(xiàn)場選取一個(gè)危巖測點(diǎn)和三個(gè)球形靶點(diǎn),設(shè)三個(gè)球形靶點(diǎn)分別為球形靶點(diǎn)1、球形靶點(diǎn)2、球形靶點(diǎn)3,四個(gè)點(diǎn)位滿足如下關(guān)系式:
32、
33、其中,l12、l13、l23分別為球形靶點(diǎn)1與球形靶點(diǎn)2的距離、球形靶點(diǎn)1與球形靶點(diǎn)3的距離、球形靶點(diǎn)2與球形靶點(diǎn)3的距離;r01、r02、r03分別為球形靶點(diǎn)1、球形靶點(diǎn)2、球形靶點(diǎn)3的初始半徑,即危巖測點(diǎn)與球形靶點(diǎn)1、球形靶點(diǎn)2、球形靶點(diǎn)3的初始距離。
34、可選地,所述步驟s2中,根據(jù)三球面定位法解算出危巖測點(diǎn)的三維坐標(biāo),過程如下:
35、
36、其中,xt、yt、zt為待求的危巖測點(diǎn)在不同時(shí)刻的三維坐標(biāo);x1、y1、z1為球形靶點(diǎn)1的球心三維坐標(biāo),x2、y2、z2為球形靶點(diǎn)2的球心三維坐標(biāo),x3、y3、z3為球形靶點(diǎn)3的球心三維坐標(biāo),三個(gè)球形靶點(diǎn)的球心三維坐標(biāo)由手持rtk測量儀測量,為不隨時(shí)間變化的定值;rt1、rt2、rt3分別為不同時(shí)刻球形靶點(diǎn)1、球形靶點(diǎn)2、球形靶點(diǎn)3與危巖測點(diǎn)的距離,即三球面定位法中的半徑。
37、可選地,所述三球面定位法解算危巖測點(diǎn)的三維坐標(biāo)采用解析法或數(shù)值近似解法。
38、可選地,所述步驟s4中,危巖運(yùn)動(dòng)姿態(tài)模型包括運(yùn)動(dòng)軌跡和傾斜角;其中,運(yùn)動(dòng)軌跡包含x,y,z三個(gè)方向,傾斜角包含x,y兩個(gè)方向;
39、將不同時(shí)刻危巖測點(diǎn)放在對應(yīng)的三維空間坐標(biāo)位置,并賦予對應(yīng)的傾斜角,進(jìn)行渲染與展示,得到危巖運(yùn)動(dòng)姿態(tài)模型。
40、另一方面,提供了一種電子設(shè)備,所述電子設(shè)備包括:
41、處理器;
42、存儲(chǔ)器,所述存儲(chǔ)器上存儲(chǔ)有計(jì)算機(jī)可讀指令,所述計(jì)算機(jī)可讀指令被所述處理器加載并執(zhí)行時(shí),實(shí)現(xiàn)如上述基于激光雷達(dá)定位與傾角測斜的危巖運(yùn)動(dòng)監(jiān)測方法的步驟。
43、另一方面,提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)中存儲(chǔ)有程序代碼,所述程序代碼可被處理器調(diào)用執(zhí)行如上述基于激光雷達(dá)定位與傾角測斜的危巖運(yùn)動(dòng)監(jiān)測方法的步驟。
44、本發(fā)明提供的技術(shù)方案帶來的有益效果至少包括:
45、本發(fā)明實(shí)施例中,采用手持rtk測量儀定位球形靶點(diǎn)作為基準(zhǔn)點(diǎn),再采用激光雷達(dá)定位危巖測點(diǎn),克服了傳統(tǒng)gnss實(shí)時(shí)定位技術(shù)易受天氣影響造成精度差、時(shí)效性低、易受干擾等問題;采用激光雷達(dá)測量距離,以及可重復(fù)使用的手持rtk測量儀對三個(gè)球形靶點(diǎn)的坐標(biāo)進(jìn)行一次定位,硬件設(shè)備造價(jià)較低,適合在庫岸危巖區(qū)域進(jìn)行大量布設(shè);能夠?qū)崟r(shí)獲取危巖測點(diǎn)的三維運(yùn)動(dòng)軌跡、傾角變化及加速度變化,具有對運(yùn)動(dòng)姿態(tài)實(shí)時(shí)呈現(xiàn)功能,從而實(shí)現(xiàn)庫岸危巖運(yùn)動(dòng)姿態(tài)的監(jiān)測及預(yù)警。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!