一種輸電線路巡檢無人機的機巢布設方法及系統與流程
本發明涉及無人機機巢規劃,尤其是涉及一種輸電線路巡檢無人機的機巢布設方法及系統。
背景技術:
1、在輸電線路巡檢無人機機巢的塔間調度策略研究中,輸電線路拐角處的機巢布設位置與巡檢死角的關聯性是一個關鍵問題。當機巢位于線路轉向區域時,由于地形和線路走向的復雜性,無人機的巡檢路徑會受到顯著影響。具體而言,線路轉向區域通常存在較大的空間變化,導致無人機在飛行過程中難以覆蓋所有區域,從而形成巡檢盲區,機巢布設位置的不同會直接影響巡檢盲區的范圍和分布密度。進一步分析,無人機的巡檢路徑會受到巡檢盲區分布的制約,由于巡檢盲區的存在,無人機需要在有限的飛行時間內調整巡檢路徑,以盡可能覆蓋更多區域。然而,巡檢盲區的空間分布往往是不規則的,導致路徑規劃算法難以高效處理,從而無法保障整體的巡檢覆蓋率。現有的無人機機巢的選址通常依賴于專家經驗,未能充分考慮無人機機巢布設后的巡檢盲區存在情況,導致輸電線路巡檢無人機的巡檢覆蓋率較低。
技術實現思路
1、本發明提供一種輸電線路巡檢無人機的機巢布設方法及系統,以解決現有技術中輸電線路巡檢無人機的機巢選址無法保障整體的巡檢覆蓋率的技術問題。
2、為了解決上述技術問題,本發明實施例第一方面提供一種輸電線路巡檢無人機的機巢布設方法,包括:
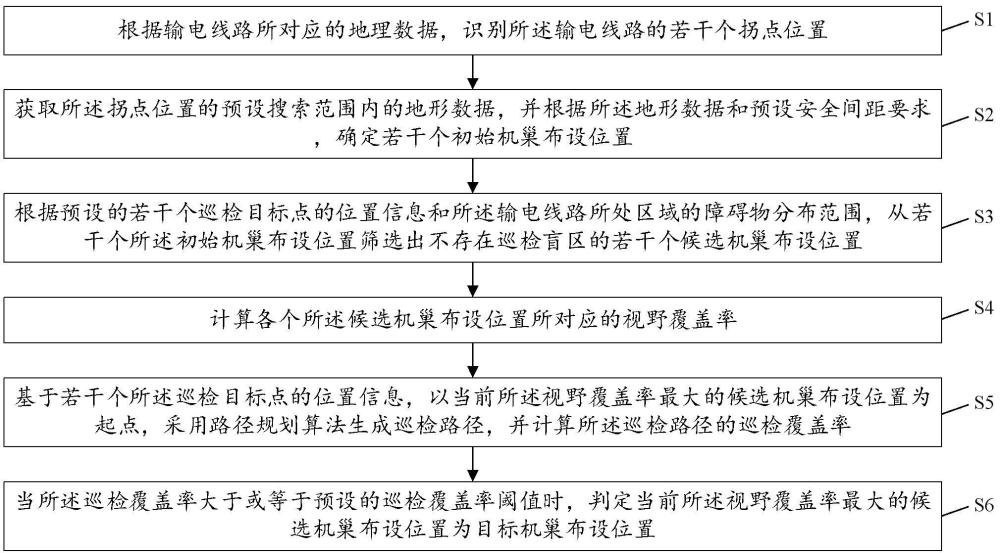
3、根據輸電線路所對應的地理數據,識別所述輸電線路的若干個拐點位置;
4、獲取所述拐點位置的預設搜索范圍內的地形數據,并根據所述地形數據和預設安全間距要求,確定若干個初始機巢布設位置;
5、根據預設的若干個巡檢目標點的位置信息和所述輸電線路所處區域的障礙物分布范圍,從若干個所述初始機巢布設位置篩選出不存在巡檢盲區的若干個候選機巢布設位置;
6、計算各個所述候選機巢布設位置所對應的視野覆蓋率;
7、基于若干個所述巡檢目標點的位置信息,以當前所述視野覆蓋率最大的候選機巢布設位置為起點,采用路徑規劃算法生成巡檢路徑,并計算所述巡檢路徑的巡檢覆蓋率;
8、當所述巡檢覆蓋率大于或等于預設的巡檢覆蓋率閾值時,判定當前所述視野覆蓋率最大的候選機巢布設位置為目標機巢布設位置。
9、作為優選方案,所述根據輸電線路所對應的地理數據,識別所述輸電線路的若干個拐點位置,具體包括:
10、根據所述地理數據,獲取所述輸電線路走廊區域內的經緯度坐標點集合;
11、以預設的搜索半徑和最少坐標點數量為聚類條件,采用密度聚類算法對所述經緯度坐標點集合進行聚類分析,獲得若干個所述拐點位置。
12、作為優選方案,所述獲取所述拐點位置的預設搜索范圍內的地形數據,并根據所述地形數據和預設安全間距要求,確定若干個初始機巢布設位置,具體包括:
13、根據所述經緯度坐標點集合,采用克里金空間插值算法生成所述拐點位置的預設搜索范圍內的地形高程曲面數據;其中,所述預設搜索范圍具體為三維圓柱形搜索范圍;
14、根據所述地形高程曲面數據,計算所述預設搜索范圍內的最大高差值、平均坡度值;
15、獲取所述預設搜索范圍內的遙感影像數據和地形穩定性指標,并根據所述遙感影像數據計算所述預設搜索范圍內的歸一化植被指數;
16、根據所述最大高差值、所述平均坡度值、所述歸一化植被指數和所述地形穩定性指標,構建空間適宜度評分矩陣,并采用多層次模糊評價方法計算所述拐點位置的空間適宜度得分;
17、根據所述障礙物分布范圍,從所述空間適宜度得分大于或等于空間適宜度得分閾值的若干個拐點位置中篩選出滿足所述預設安全間距要求的若干個所述初始機巢布設位置;
18、其中,所述預設安全間距要求包括:機巢布設位置與任一障礙物之間的距離大于預設安全距離閾值、機巢布設位置與其相鄰的拐點位置的連線與水平面之間的夾角處于預設安全夾角范圍、機巢布設位置與其相鄰的機巢之間的間距大于預設安全間距閾值。
19、作為優選方案,所述根據預設的若干個巡檢目標點的位置信息和所述輸電線路所處區域的障礙物分布范圍,從若干個所述初始機巢布設位置篩選出不存在巡檢盲區的若干個候選機巢布設位置,具體包括:
20、根據若干個所述巡檢目標點的位置信息和所述初始機巢布設位置,生成從各個所述初始機巢布設位置出發的模擬巡檢路徑;
21、按照預設采樣距離,獲取所述模擬巡檢路徑上的若干個飛行軌跡采樣點;
22、根據預設的視錐角頂角參數和觀測距離閾值,在每個所述飛行軌跡采樣點上建立觀測視錐體;
23、采用射線檢測方法獲取所述觀測視錐體的邊界面與所述障礙物分布范圍的交點坐標集,并基于所述交點坐標集確定視野遮擋區域;
24、根據各個所述模擬巡檢路徑所對應的位于所述視野遮擋區域的巡檢目標點數量和所述巡檢目標點的總數量之間的比值,確定各個所述模擬巡檢路徑所對應的視野遮擋比率;
25、基于各個所述模擬巡檢路徑所對應的初始機巢布設位置,以所述視野遮擋比率與預設的視野遮擋比率閾值之間的比較結果,從若干個所述初始機巢布設位置篩選出不存在巡檢盲區的若干個候選機巢布設位置;其中,所述視野遮擋比率小于所述視野遮擋比率閾值的模擬巡檢路徑所對應的初始機巢布設位置為不存在巡檢盲區的候選機巢布設位置。
26、作為優選方案,所述根據若干個所述巡檢目標點的位置信息和所述初始機巢布設位置,生成從各個所述初始機巢布設位置出發的模擬巡檢路徑,具體包括:
27、根據若干個所述巡檢目標點的位置信息和所述初始機巢布設位置,采用最短路徑搜索算法生成從各個所述初始機巢布設位置出發的初始飛行路徑點序列;
28、根據預設的控制點間隔、曲線平滑度、最小轉彎半徑和最大爬升角度,通過三次貝塞爾曲線對所述初始飛行路徑點序列進行連接,生成所述模擬巡檢路徑。
29、作為優選方案,所述計算各個所述候選機巢布設位置所對應的視野覆蓋率,具體包括:
30、根據各個所述候選機巢布設位置,確定所述輸電線路的巡檢區域;
31、通過預設尺寸的蜂窩網格將所述巡檢區域劃分為若干個巡檢網格單元;
32、根據各個所述巡檢網格單元中的巡檢目標點數量以及各個所述巡檢網格單元的面積,確定各個所述巡檢網格單元的巡檢目標點密度,并將所述巡檢目標點密度大于預設密度閾值的巡檢網格單元作為核心監測區域;
33、在所述核心監測區域內的候選機巢布設位置建立極坐標掃描網格,并在所述極坐標掃描網格上生成若干個觀測采樣點;
34、根據所述障礙物分布范圍,采用射線投射法獲取所述核心監測區域內所述觀測采樣點與各個所述巡檢網格單元之間的障礙物遮擋情況,以從若干個所述觀測采樣點中篩選出若干個有效觀測點;
35、根據所述有效觀測點的數量與所述觀測采樣點的數量之間的比值,確定各個所述候選機巢布設位置所對應的視野覆蓋率。
36、作為優選方案,所述基于若干個所述巡檢目標點的位置信息,以當前所述視野覆蓋率最大的候選機巢布設位置為起點,采用路徑規劃算法生成巡檢路徑,具體包括:
37、基于若干個所述巡檢目標點的位置信息,以當前所述視野覆蓋率最大的候選機巢布設位置為起點,采用路徑規劃算法生成初始巡檢點序列;
38、根據預設的飛行高度約束與轉向角度約束,對所述初始巡檢點序列中各巡檢點的位置進行調整,獲得優化巡檢點序列;
39、根據預設的曲率約束、控制點間隔和所述轉向角度約束,利用三次樣條曲線對所述優化巡檢點序列進行連接,生成所述巡檢路徑。
40、作為優選方案,所述計算所述巡檢路徑的巡檢覆蓋率,具體包括:
41、根據若干個所述巡檢目標點的位置信息,確定所述輸電線路的巡檢目標區域;
42、根據預設的采樣間隔和高度分層信息,生成所述巡檢路徑所對應的若干個三維巡檢采樣點;其中,所述高度分層信息為位于所述輸電線路的中心上方的若干個高度層的高度信息;
43、根據各個所述三維巡檢采樣點的位置信息和預設的監測掃描寬度,確定所述巡檢路徑所對應的監測掃描區域;
44、根據所述監測掃描區域與所述巡檢目標區域之間的重合區域面積與所述巡檢目標區域的面積之間的比值,獲得所述巡檢路徑的巡檢覆蓋率。
45、作為優選方案,所述方法還包括:
46、當所述巡檢覆蓋率小于所述巡檢覆蓋率閾值時,將當前所述視野覆蓋率最大的候選機巢布設位置剔除;
47、重新以當前所述視野覆蓋率最大的候選機巢布設位置為起點生成新的巡檢路徑,并計算所述新的巡檢路徑的巡檢覆蓋率,直至所述巡檢覆蓋率滿足所述巡檢覆蓋率閾值。
48、本發明實施例第二方面提供一種輸電線路巡檢無人機的機巢布設系統,包括:
49、拐點位置識別模塊,用于根據輸電線路所對應的地理數據,識別所述輸電線路的若干個拐點位置;
50、初始機巢布設位置確定模塊,用于獲取所述拐點位置的預設搜索范圍內的地形數據,并根據所述地形數據和預設安全間距要求,確定若干個初始機巢布設位置;
51、候選機巢布設位置篩選模塊,用于根據預設的若干個巡檢目標點的位置信息和所述輸電線路所處區域的障礙物分布范圍,從若干個所述初始機巢布設位置篩選出不存在巡檢盲區的若干個候選機巢布設位置;
52、視野覆蓋率計算模塊,用于計算各個所述候選機巢布設位置所對應的視野覆蓋率;
53、巡檢覆蓋率計算模塊,用于基于若干個所述巡檢目標點的位置信息,以當前所述視野覆蓋率最大的候選機巢布設位置為起點,采用路徑規劃算法生成巡檢路徑,并計算所述巡檢路徑的巡檢覆蓋率;
54、目標機巢布設位置確定模塊,用于當所述巡檢覆蓋率大于或等于預設的巡檢覆蓋率閾值時,判定當前所述視野覆蓋率最大的候選機巢布設位置為目標機巢布設位置。
55、相比于現有技術,本發明實施例的有益效果在于,在輸電線路拐點處的機巢布設位置篩選過程中,能夠基于輸電線路所處區域的障礙物分布范圍剔除存在巡檢盲區的機巢布設位置,并能夠結合候選機巢布設位置所對應的視野覆蓋率及各個候選機巢布設位置所對應的巡檢路徑的巡檢覆蓋率來確定最優機巢布設位置,從而能夠顯著提高輸電線路拐點處的機巢布設可靠性,有助于提高輸電線路巡檢無人機的巡檢覆蓋率、巡檢效率和巡檢安全性。
- 還沒有人留言評論。精彩留言會獲得點贊!