一種四輪非線性二自由度車輛模型仿真系統(tǒng)及方法
本發(fā)明涉及車輛運(yùn)動(dòng)特性仿真領(lǐng)域,特別涉及一種四輪非線性二自由度車輛模型仿真系統(tǒng)及方法。
背景技術(shù):
1、車輛動(dòng)力學(xué)模型常用于幫助汽車工程師模擬和分析車輛在不同工況下的運(yùn)動(dòng)響應(yīng)。其在無(wú)人駕駛軌跡跟蹤控制系統(tǒng)、電子車身穩(wěn)定性控制系統(tǒng)、線控轉(zhuǎn)向路感模擬系統(tǒng)等底盤域控制系統(tǒng)的開(kāi)發(fā)和測(cè)試中均有所應(yīng)用。
2、目前使用較為廣泛的車輛動(dòng)力學(xué)模型為二自由度模型(兩輪模型),即僅考慮車輛的側(cè)向、橫擺運(yùn)動(dòng),按照其對(duì)輪胎側(cè)偏剛度的表達(dá)方式可分為線性二自由度模型和非線性二自由度模型,通常計(jì)算模型輸出的橫擺角速度、質(zhì)心側(cè)偏角、側(cè)向加速度等作為模型精度評(píng)價(jià)指標(biāo)。在線性二自由度模型中,輪胎側(cè)偏力表示為輪胎側(cè)偏角與側(cè)偏剛度的乘積,根據(jù)輪胎的側(cè)偏特性,當(dāng)側(cè)偏角較小時(shí),輪胎側(cè)偏剛度近似為固定常數(shù)。線性模型中使用局部的側(cè)偏剛度作為整體側(cè)偏剛度,這種簡(jiǎn)化使二自由度模型只能應(yīng)用于側(cè)偏角較小的工況,在仿真測(cè)試與實(shí)際應(yīng)用中,線性二自由度模型精度較差,無(wú)法準(zhǔn)確表達(dá)車輛的運(yùn)動(dòng)特性。為提高二自由度模型輸出精度,專利cn202210774277.4提供了一種二自由度車輛模型橫擺角速度增益修正方法,其通過(guò)測(cè)量實(shí)車在不同車速下的橫擺角速度增益從而對(duì)二自由度模型的輸出進(jìn)行修正。這種方法對(duì)車輛傳感器的測(cè)量精度以及處理器的性能要求較高,并且其無(wú)法通過(guò)模型反映真實(shí)車輛的輪胎側(cè)偏力變化情況,使用范圍較窄。專利cn202380021092.9在二自由度模型的基礎(chǔ)上使用magic?formula輪胎模型表示輪胎側(cè)偏力。盡管考慮了輪胎的非線性側(cè)偏剛度,由于兩輪二自由度車輛模型自身特性,其對(duì)輪胎側(cè)偏角與垂向載荷的計(jì)算精度不高,輪胎側(cè)偏力的計(jì)算誤差依然較大,在高速時(shí),這種誤差甚至?xí)?dǎo)致模型失穩(wěn)。
3、考慮到二自由度車輛模型的橫擺角速度、質(zhì)心側(cè)偏角、側(cè)向加速度都是基于輪胎側(cè)偏力計(jì)算。從輪胎力對(duì)車輛動(dòng)力學(xué)的影響出發(fā),輪胎模型與車輛動(dòng)力學(xué)的結(jié)合十分重要,如何提高輪胎模型的輸入精度成為亟需解決的問(wèn)題之一。與此同時(shí),要想保證車輛模型不會(huì)過(guò)于復(fù)雜,如何在不引入新自由度的情況下提高二自由度車輛模型的輸出精度也尤為關(guān)鍵。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明提供一種四輪非線性二自由度車輛仿真方法及系統(tǒng)以確保其在高速工況下的仿真精度和穩(wěn)定性,從而解決現(xiàn)有線性二自由度兩輪車輛模型、非線性二自由度兩輪車輛模型精度及穩(wěn)定性較差的問(wèn)題。
2、為解決上述問(wèn)題,本發(fā)明提供如下方案:
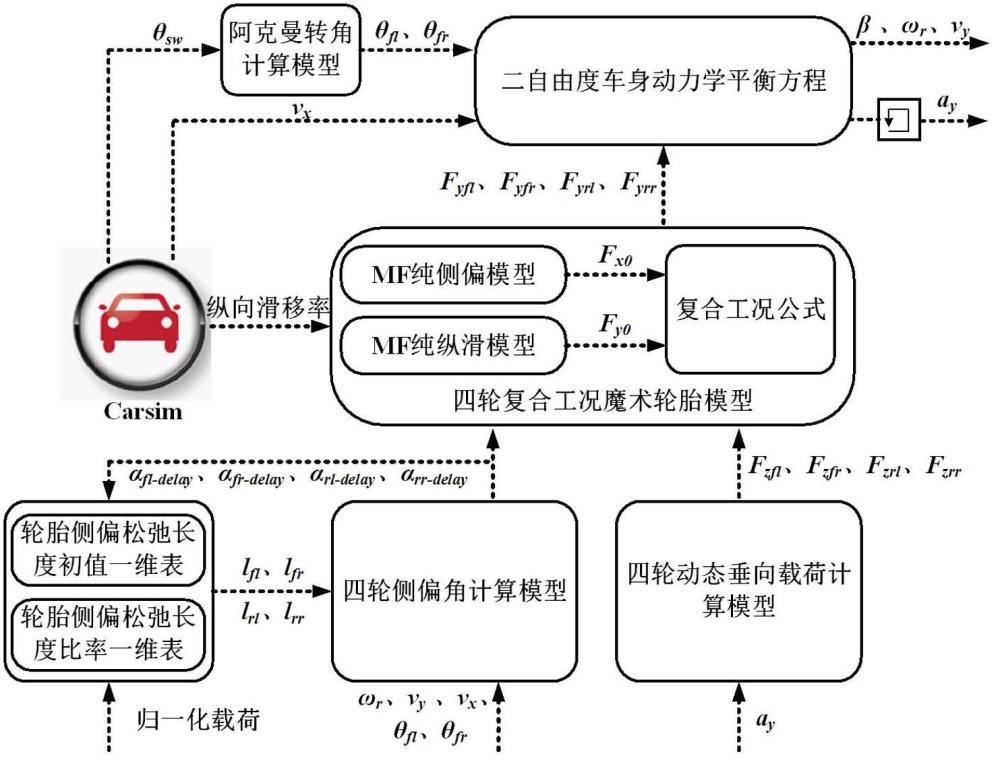
3、一種四輪非線性二自由度車輛模型仿真系統(tǒng),該系統(tǒng)中包含二自由度車身動(dòng)力學(xué)模型、四輪復(fù)合工況魔術(shù)輪胎模型、阿克曼轉(zhuǎn)角計(jì)算模型、四輪側(cè)偏角計(jì)算模型、四輪動(dòng)態(tài)垂向載荷計(jì)算模型和carsim軟件模塊;
4、所述二自由度車身動(dòng)力學(xué)模型中左前輪和右前輪轉(zhuǎn)角θf(wàn)l、θf(wàn)r通過(guò)阿克曼轉(zhuǎn)角計(jì)算模型得到,
5、左前輪、右前輪、左后輪和右后輪的輪胎側(cè)偏力fyfl、fyfr、fyrl和fyrr通過(guò)四輪復(fù)合工況魔術(shù)輪胎模型計(jì)算獲得;
6、所述四輪復(fù)合工況魔術(shù)輪胎模型中包含mf純側(cè)偏模型、mf純縱滑模型和復(fù)合工況公式;
7、所述復(fù)合工況公式為:
8、
9、其中,fx表示某輪胎縱向力、fy表示某輪胎側(cè)向力,σ為歸一化滑移率,σx為復(fù)合工況縱向滑移率,σy為復(fù)合工況側(cè)向滑移率,fy0、fx0分別表示該輪胎純側(cè)偏、純縱滑工況下輪胎側(cè)向力、縱向力,通過(guò)所述mf純側(cè)偏模型和mf純縱滑模型計(jì)算得到;
10、
11、其中,α為輪胎側(cè)偏角,κ為輪胎縱向滑移率;
12、所述mf純側(cè)偏模型和mf純縱滑模型中峰值因子、形狀因子、剛度因子和曲率因子均與輪胎垂向載荷fz存在線性關(guān)系,通過(guò)輪胎的側(cè)偏和縱滑特性數(shù)據(jù)擬合得到;
13、四輪復(fù)合工況魔術(shù)輪胎模型中輪胎側(cè)偏角通過(guò)四輪偏角計(jì)算模型獲得,該模型中考慮到輪胎側(cè)偏角的遲滯響應(yīng),使用一階松弛系統(tǒng)表示輪胎側(cè)偏角的非穩(wěn)態(tài)響應(yīng),該模型中四輪遲滯側(cè)偏角與輪胎側(cè)偏角的關(guān)系為:
14、
15、其中αfl-delay、αfr-delay、αrl-delay、αrr-delay分別為左前輪、右前輪、左后輪、右后輪的遲滯側(cè)偏角,αfl、αfr、αrl、αrr分別為左前輪、右前輪、左后輪、右后輪的輪胎側(cè)偏角,lfl、lfr、lrl、lrr分別為左前輪、右前輪、左后輪、右后輪的側(cè)偏松弛長(zhǎng)度,使用carsim軟件模塊中給定的經(jīng)驗(yàn)公式計(jì)算或者根據(jù)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行擬合得到;
16、在車輛坐標(biāo)系下,各輪胎的輪胎側(cè)偏角表達(dá)式為:
17、
18、由此,以車輛質(zhì)心縱向速度vx、車輛質(zhì)心側(cè)向速度vy、橫擺角速度ωr,左前輪、右前輪、左后輪、右后輪的側(cè)偏松弛長(zhǎng)度lfl、lfr、lrl、lrr,以及阿克曼轉(zhuǎn)角計(jì)算模型得到的左前輪和右前輪轉(zhuǎn)角θf(wàn)l、θf(wàn)r為輸入,輸出左前輪、右前輪、左后輪、右后輪的遲滯側(cè)偏角αfl-delay、αfr-delay、αrl-delay、αrr-delay作為四輪動(dòng)態(tài)垂向載荷計(jì)算模型的輸入。
19、其中,所述二自由度車身動(dòng)力學(xué)模型為:
20、
21、該模型中采用以車身質(zhì)心為坐標(biāo)原點(diǎn)建立的車輛坐標(biāo)系,x軸正方向即縱向?yàn)檐囕v的前進(jìn)方向,垂直于地面向上的方向?yàn)閦軸正方向,y軸正方向即側(cè)向按照右手定則設(shè)定;
22、該模型中m為車輛簧載質(zhì)量,為車輛質(zhì)心側(cè)向加速度,vx為車輛質(zhì)心縱向速度,ωr為車輛橫擺角速度,fyfl、fyfr、fyrl、fyrr分別為左前輪、右前輪、左后輪、右后輪的輪胎側(cè)偏力,θf(wàn)l、θf(wàn)r分別為左前輪、右前輪轉(zhuǎn)角,iz為車輛繞z軸轉(zhuǎn)動(dòng)慣量,
23、為車輛橫擺角加速度,a為車身質(zhì)心到前軸的距離,b為車身質(zhì)心到后軸的距離,b為車輛前后輪距;
24、該模型的輸出為車輛質(zhì)心側(cè)偏角β、橫擺角速度ωr、車輛質(zhì)心側(cè)向速度vy以及車輛質(zhì)心側(cè)向加速度ay。
25、優(yōu)選地,所述阿克曼轉(zhuǎn)角計(jì)算模型為:
26、
27、阿克曼轉(zhuǎn)角計(jì)算模型中,l為車輛前后軸軸距,θsw為方向盤轉(zhuǎn)角,isw為轉(zhuǎn)向系統(tǒng)角傳動(dòng)比。
28、優(yōu)選地,所述mf純側(cè)偏模型表示為:
29、
30、優(yōu)選地,所述mf純縱滑模型表示為:
31、
32、d1、d2為峰值因子,c1、c2為形狀因子,b1、b2為剛度因子,e1、e2為曲率因子。
33、優(yōu)選地,所述四輪動(dòng)態(tài)垂向載荷計(jì)算模型得到,模型公式為:
34、
35、該模型中fzfl、fzfr、fzrl、fzrr分別為左前輪、右前輪、左后輪、右后輪的垂向載荷是模型的輸出參數(shù);模型的輸入?yún)?shù)為所述二自由度車身動(dòng)力學(xué)模型輸出的車輛質(zhì)心側(cè)向加速度ay;ms為前后懸架總質(zhì)量,mt為四個(gè)車輪的總質(zhì)量,g為重力加速度,h為車輛的質(zhì)心高度。
36、優(yōu)選地,四輪偏角計(jì)算模型中各輪胎的側(cè)偏松弛長(zhǎng)度使用carsim軟件模型中的經(jīng)驗(yàn)公式,由輪胎側(cè)偏長(zhǎng)度初值和輪胎側(cè)偏松弛長(zhǎng)度比率相乘得到,輪胎側(cè)偏松弛長(zhǎng)度初值由輪胎遲滯側(cè)偏角進(jìn)行查表計(jì)算,輪胎側(cè)偏松弛長(zhǎng)度比率由輪胎歸一化垂直載荷進(jìn)行查表計(jì)算;所述輪胎歸一化垂直載荷由四輪動(dòng)態(tài)垂向載荷計(jì)算模型得到的實(shí)際垂向載荷除以輪胎標(biāo)稱載荷得到。
37、優(yōu)選地,四輪復(fù)合工況魔術(shù)輪胎模型中參數(shù)b1、b2、c1、c2、d1、d2、e1、e2均與輪胎垂向載荷fz滿足如下線性關(guān)系:
38、
39、式中:a1、a2、a3、a4?、a5、a6、a7、a8、a9、a10?、a11、a12、a13、a14、a15、a16?、a17均為待擬合參數(shù)。
40、本發(fā)明還提供了一種基于所述四輪非線性二自由度車輛模型仿真系統(tǒng)的仿真方法,該方法的步驟如下:
41、步驟1:獲取輪胎的側(cè)偏和縱滑特性數(shù)據(jù);
42、步驟2:辨識(shí)四輪復(fù)合工況魔術(shù)輪胎模型中魔術(shù)公式輪胎模型計(jì)算公式的待擬合參數(shù);
43、步驟3:利用步驟2中得到的擬合參數(shù)在matlab/simulink中建立四輪復(fù)合工況魔術(shù)輪胎模型;
44、步驟4:獲取以下車輛結(jié)構(gòu)參數(shù):簧載質(zhì)量m、車身橫擺轉(zhuǎn)動(dòng)慣量iz、質(zhì)心到前軸距離a、質(zhì)心到后軸距離b、質(zhì)心高度h、輪距b、輪胎總質(zhì)量mt和前后懸架總質(zhì)量ms;
45、步驟5:以車身質(zhì)心為坐標(biāo)原點(diǎn)建立的車輛坐標(biāo)系,x軸正方向即縱向?yàn)檐囕v的前進(jìn)方向,垂直于地面向上的方向?yàn)閦軸正方向,y軸正方向即側(cè)向按照右手定則設(shè)定;
46、步驟6:基于步驟4所獲取的車輛結(jié)構(gòu)參數(shù)建立所述二自由度車身動(dòng)力學(xué)模型以及阿克曼轉(zhuǎn)角計(jì)算模型;
47、步驟7:基于步驟4所獲取的車輛結(jié)構(gòu)參數(shù)建立四輪偏角計(jì)算模型和四輪動(dòng)態(tài)垂向載荷計(jì)算模型;
48、步驟8:連接各模型之間的信號(hào)接口,具體如下:
49、carsim軟件模塊輸出方向盤轉(zhuǎn)角θsw至阿克曼轉(zhuǎn)角計(jì)算模型,阿克曼轉(zhuǎn)角計(jì)算模型輸出左前輪和右前輪轉(zhuǎn)角θf(wàn)l、θf(wàn)r至二自由度車身動(dòng)力學(xué)模型;carsim軟件模塊同時(shí)還向二自由度車身動(dòng)力學(xué)模型輸出車輛質(zhì)心縱向速度vx,向四輪復(fù)合工況魔術(shù)輪胎模型輸出輪胎縱向滑移率κ;
50、四輪復(fù)合工況魔術(shù)輪胎模型的輸入為四輪偏角計(jì)算模型輸出的左前輪、右前輪、左后輪、右后輪的遲滯側(cè)偏角αfl-delay、αfr-delay、αrl-delay、αrr-delay,以及四輪動(dòng)態(tài)垂向載荷計(jì)算模型輸出的左前輪、右前輪、左后輪、右后輪的垂向載荷fzfl、fzfr、fzrl、fzrr;四輪復(fù)合工況魔術(shù)輪胎模型輸出的左前輪、右前輪、左后輪和右后輪的輪胎側(cè)偏力fyfl、fyfr、fyrl和fyrr作為二自由度車身動(dòng)力學(xué)模型的輸入;
51、二自由度車身動(dòng)力學(xué)模型輸出車輛質(zhì)心側(cè)偏角β、橫擺角速度ωr、車輛質(zhì)心側(cè)向速度vy以及車輛質(zhì)心側(cè)向加速度ay;其中車輛質(zhì)心側(cè)向加速度ay串聯(lián)一個(gè)memory模塊后作為四輪動(dòng)態(tài)垂向載荷模型的輸入;
52、四輪偏角計(jì)算模型以carsim軟件模塊輸出的車輛質(zhì)心縱向速度vx、二自由度車身動(dòng)力學(xué)模型輸出的車輛質(zhì)心側(cè)向速度vy和橫擺角速度ωr,通過(guò)擬合得到的左前輪、右前輪、左后輪、右后輪的側(cè)偏松弛長(zhǎng)度lfl、lfr、lrl、lrr,以及阿克曼轉(zhuǎn)角計(jì)算模型得到的左前輪和右前輪轉(zhuǎn)角θf(wàn)l、θf(wàn)r為輸入;
53、步驟9:在carsim中設(shè)置所需轉(zhuǎn)向工況,與simulink模型進(jìn)行聯(lián)合仿真,并驗(yàn)證模型的準(zhǔn)確性。
54、優(yōu)選地,步驟8中,四輪偏角計(jì)算模型中各輪胎的側(cè)偏松弛長(zhǎng)度使用carsim軟件模型中的經(jīng)驗(yàn)公式,由輪胎側(cè)偏長(zhǎng)度初值和輪胎側(cè)偏松弛長(zhǎng)度比率相乘得到;
55、輪胎側(cè)偏松弛長(zhǎng)度初值由輪胎遲滯側(cè)偏角輸入輪胎側(cè)偏松弛長(zhǎng)度初值一維表進(jìn)行查表得到;
56、輪胎側(cè)偏松弛長(zhǎng)度比率由輪胎歸一化垂直載荷輸入輪胎側(cè)偏松弛長(zhǎng)度比率一維表進(jìn)行查表得到;所述輪胎歸一化垂直載荷由四輪動(dòng)態(tài)垂向載荷計(jì)算模型得到的實(shí)際垂向載荷除以輪胎標(biāo)稱載荷得到。
57、優(yōu)選地,步驟1中獲取輪胎的側(cè)偏和縱滑特性數(shù)據(jù)的具體方法選自以下方式中的一種:
58、(1)對(duì)實(shí)際輪胎進(jìn)行側(cè)偏、縱滑臺(tái)架實(shí)驗(yàn),得到輪胎在純側(cè)偏、純縱滑工況下的側(cè)偏力-側(cè)偏角特性及縱向力-縱向滑移率特性;
59、(2)carsim軟件模塊中選擇所需的輪胎尺寸,得到其自帶輪胎側(cè)偏角為0°至26°的8種特征垂向載荷下的輪胎側(cè)向力數(shù)據(jù)以及滑移率為0%至100%的8種特征垂向載荷下的輪胎縱向力數(shù)據(jù),作為輪胎的側(cè)偏和縱滑特性數(shù)據(jù)。
60、優(yōu)選地,步驟2中辨識(shí)四輪復(fù)合工況魔術(shù)輪胎模型中魔術(shù)公式輪胎模型計(jì)算公式的待擬合參數(shù)的方法為:
61、步驟1):使用步驟1中的carsim軟件模塊自帶輪胎數(shù)據(jù)時(shí),需要進(jìn)行一定的數(shù)據(jù)處理:將原數(shù)據(jù)中第一行的特征載荷數(shù)據(jù)全部改為0;
62、步驟2):使用matlab軟件中的曲線擬合工具箱進(jìn)行參數(shù)辨識(shí);將步驟1)中單一特征垂向載荷對(duì)應(yīng)的側(cè)向力數(shù)據(jù)及自變量側(cè)偏角以矩陣形式導(dǎo)入至matlab工作區(qū),在曲線擬合工具箱中選擇側(cè)偏角為x數(shù)據(jù),選擇側(cè)向力為y數(shù)據(jù),擬合魔術(shù)公式的側(cè)向力基本方程,得到單一載荷下方程中的b1、c1、d1、e1四個(gè)參數(shù)的數(shù)值;
63、步驟3)替換其他特征垂向載荷數(shù)據(jù)重復(fù)步驟2)得到8種特征垂向載荷下擬合的b1、c1、d1、e1參數(shù)的數(shù)值;
64、步驟4)將8種特征垂向載荷數(shù)值和對(duì)應(yīng)的b1、c1、d1、e1參數(shù)的數(shù)值以矩陣形式導(dǎo)入至matlab工作區(qū)在曲線擬合工具箱中選擇特征垂向載荷為x數(shù)據(jù),以其中一種參數(shù)為y數(shù)據(jù),然后使用多項(xiàng)式回歸,擬合出該參數(shù)關(guān)于垂向載荷之間的線性關(guān)系式,記錄擬合方程;
65、步驟5):重復(fù)步驟4)操作,直至得到b1、c1、d1、e1全部參數(shù)的擬合方程;
66、步驟6):使用步驟4)和步驟5)得到的b1、c1、d1、e1參數(shù)擬合方程對(duì)魔術(shù)公式的側(cè)向力基本方程的b1、c1、d1、e1參數(shù)進(jìn)行替換,可得到純側(cè)偏工況下的魔術(shù)公式輪胎模型計(jì)算公式;
67、步驟7):將側(cè)偏角替換為縱向滑移率數(shù)據(jù),重復(fù)步驟2)~步驟6)得到純縱滑工況下的魔術(shù)公式輪胎模型計(jì)算公式。
68、優(yōu)選地,步驟3中利用步驟2中得到的擬合參數(shù)在matlab/simulink中建立四輪復(fù)合工況魔術(shù)輪胎模型的步驟如下:
69、利用步驟2中得到的擬合參數(shù)使用matlab/simulink建立出純側(cè)偏工況下的魔術(shù)公式輪胎模型和純縱滑工況下的魔術(shù)公式輪胎模型,
70、以純側(cè)偏工況下的魔術(shù)公式輪胎模型和純縱滑工況下的魔術(shù)公式輪胎模型輸出的純側(cè)偏工況下輪胎側(cè)向力fy0和純縱滑工況下輪胎縱向力fx0;依據(jù)以下公式建立四輪復(fù)合工況魔術(shù)輪胎模型:
71、?
72、式中:σ為歸一化滑移率,σx為復(fù)合工況縱向滑移率,σy為復(fù)合工況側(cè)向滑移率,fx為復(fù)合工況縱向力,fy為復(fù)合工況側(cè)向力。
73、本發(fā)明的有益效果:
74、本發(fā)明的仿真系統(tǒng)中所述車輛模型為四輪模型,考慮了輪胎側(cè)向松弛長(zhǎng)度引起的側(cè)偏角遲滯響應(yīng),可提供比兩輪模型更加精確的輪胎側(cè)偏角。考慮了左右車輪垂向載荷轉(zhuǎn)移和簧下質(zhì)量,從而提高輪胎垂向載荷的估算精度。所述復(fù)合工況輪胎模型考慮了非線性側(cè)偏剛度及側(cè)向力、縱向力之間的摩擦橢圓關(guān)系,可提供更加精確的輪胎側(cè)偏力。采用本發(fā)明可在不引入新自由度的情況下提高輪胎模型輸入精度,進(jìn)而提高二自由度車輛模型的穩(wěn)態(tài)及動(dòng)態(tài)響應(yīng)仿真精度。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!