一種高精度移動(dòng)物體跟蹤AI攝像頭的實(shí)施方法及系統(tǒng)與流程
本發(fā)明屬于人工智能的,涉及了一種高精度移動(dòng)物體跟蹤ai攝像頭的實(shí)施方法及系統(tǒng)。
背景技術(shù):
1、隨著計(jì)算機(jī)視覺和人工智能技術(shù)的飛速發(fā)展,移動(dòng)物體跟蹤技術(shù)廣泛應(yīng)用于安防監(jiān)控、智能交通、體育訓(xùn)練、人機(jī)交互的多個(gè)領(lǐng)域,傳統(tǒng)的移動(dòng)物體跟蹤技術(shù)面臨諸多挑戰(zhàn)。由于環(huán)境復(fù)雜多變,光照條件、遮擋、運(yùn)動(dòng)模糊等因素會(huì)嚴(yán)重影響跟蹤精度和魯棒性,不同傳感器的數(shù)據(jù)融合問題也是制約跟蹤性能的關(guān)鍵因素。
2、傳統(tǒng)方法在處理這些問題時(shí),往往采用固定權(quán)重的傳感器數(shù)據(jù)融合策略,無法根據(jù)實(shí)時(shí)環(huán)境變化動(dòng)態(tài)調(diào)整各傳感器的優(yōu)先級(jí),從而導(dǎo)致跟蹤誤差較大。傳統(tǒng)的移動(dòng)物體跟蹤算法在預(yù)測(cè)目標(biāo)物體未來運(yùn)動(dòng)軌跡時(shí),往往缺乏足夠的上下文信息和環(huán)境感知能力,難以準(zhǔn)確預(yù)測(cè)復(fù)雜場(chǎng)景下的物體運(yùn)動(dòng)軌跡。
3、基于上述問題,傳統(tǒng)的方法在跟蹤誤差較大時(shí),缺乏有效的修正流程策略。
技術(shù)實(shí)現(xiàn)思路
1、為了解決上述的問題,本發(fā)明提供了一種高精度移動(dòng)物體跟蹤ai攝像頭的實(shí)施方法及系統(tǒng)。
2、第一方面,本發(fā)明提供了一種高精度移動(dòng)物體跟蹤ai攝像頭的實(shí)施方法,采用如下技術(shù)方案:
3、一種高精度移動(dòng)物體跟蹤ai攝像頭的實(shí)施方法,包括以下步驟:
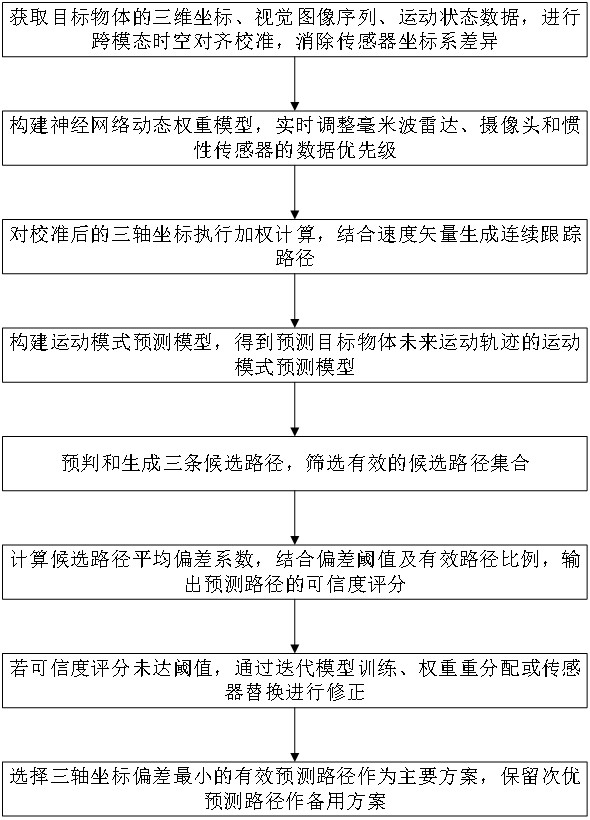
4、s1、獲取目標(biāo)物體的三維坐標(biāo)、視覺圖像序列、運(yùn)動(dòng)狀態(tài)數(shù)據(jù),進(jìn)行跨模態(tài)時(shí)空對(duì)齊校準(zhǔn),消除傳感器坐標(biāo)系差異;
5、s2、構(gòu)建神經(jīng)網(wǎng)絡(luò)動(dòng)態(tài)權(quán)重模型,實(shí)時(shí)調(diào)整毫米波雷達(dá)、攝像頭和慣性傳感器的數(shù)據(jù)優(yōu)先級(jí);
6、s3、對(duì)校準(zhǔn)后的三軸坐標(biāo)執(zhí)行加權(quán)計(jì)算,結(jié)合速度矢量生成連續(xù)跟蹤路徑;
7、s4、構(gòu)建運(yùn)動(dòng)模式預(yù)測(cè)模型,得到預(yù)測(cè)目標(biāo)物體未來運(yùn)動(dòng)軌跡的運(yùn)動(dòng)模式預(yù)測(cè)模型;
8、s5、預(yù)判和生成三條候選路徑,篩選有效的候選路徑集合;
9、s6、計(jì)算候選路徑平均偏差系數(shù),結(jié)合偏差閾值及有效路徑比例,輸出預(yù)測(cè)路徑的可信度評(píng)分;
10、s7、若可信度評(píng)分未達(dá)閾值,通過迭代模型訓(xùn)練、權(quán)重重分配或傳感器替換進(jìn)行修正;
11、s8、選擇三軸坐標(biāo)偏差最小的有效預(yù)測(cè)路徑作為主要方案,保留次優(yōu)預(yù)測(cè)路徑作備用方案。
12、本發(fā)明進(jìn)一步的方案,步驟s1,包括以下步驟:
13、s11、獲取目標(biāo)物體的三維位置坐標(biāo)、速度信息,捕捉目標(biāo)物體的視覺圖像序列,記錄目標(biāo)物體的自身運(yùn)動(dòng)狀態(tài)數(shù)據(jù);
14、具體的,利用毫米波雷達(dá)發(fā)射連續(xù)變化的頻率波,接收物體反射的信號(hào)的原理,獲取目標(biāo)物體的三維坐標(biāo)和徑向速度;利用高速攝像頭捕捉目標(biāo)物體的視覺圖像序列,利用防抖慣性傳感器,記錄目標(biāo)物體的自身運(yùn)動(dòng)狀態(tài)數(shù)據(jù);
15、具體的,防抖慣性傳感器安裝于目標(biāo)物體的時(shí)候,記錄目標(biāo)物體真實(shí)的橫向加速度、位移增量;
16、s12、針對(duì)雷達(dá)點(diǎn)云數(shù)據(jù)、視覺圖像的像素?cái)?shù)據(jù)、防抖慣性傳感器測(cè)算位移增量執(zhí)行空間對(duì)齊校準(zhǔn);
17、具體的,通過統(tǒng)一的時(shí)間信號(hào),毫米波雷達(dá)、高速攝像頭、防抖慣性傳感器的數(shù)據(jù)時(shí)間差不超過1毫秒,確保毫米波雷達(dá)、高速攝像頭、防抖慣性傳感器同時(shí)采集數(shù)據(jù);
18、基于雷達(dá)點(diǎn)云的三維坐標(biāo)、視覺圖像的二維像素坐標(biāo)、防抖慣性傳感器測(cè)算位移增量坐標(biāo),通過提取共同特征點(diǎn)建立跨模態(tài)關(guān)聯(lián),盡量解決雷達(dá)、相機(jī)坐標(biāo)系、位移增量坐標(biāo)系的空間位姿差異的問題;結(jié)合目標(biāo)物體的關(guān)鍵點(diǎn),雷達(dá)點(diǎn)云坐標(biāo)(x,y,z)、相機(jī)圖像坐標(biāo)系(u,v)、位移增量坐標(biāo)系(a,b)的映射關(guān)系轉(zhuǎn)換為齊次變換矩陣,通過最小二乘法優(yōu)化消除匹配誤差。
19、本發(fā)明進(jìn)一步的方案,步驟s2,包括以下步驟:
20、集成光照傳感器、氣象感知單元獲取當(dāng)前的光照強(qiáng)度、能見度;基于毫米波雷達(dá)輸出的速度信息、防抖慣性傳感器的自身運(yùn)動(dòng)狀態(tài)數(shù)據(jù),計(jì)算目標(biāo)物體的運(yùn)動(dòng)速度;然后建立動(dòng)態(tài)權(quán)重分配模型,用以計(jì)算毫米波雷達(dá)的測(cè)量數(shù)據(jù)、高速攝像頭的測(cè)量數(shù)據(jù)、防抖慣性傳感器的測(cè)量數(shù)據(jù)的動(dòng)態(tài)權(quán)重系數(shù),動(dòng)態(tài)權(quán)重分配通過實(shí)時(shí)地調(diào)整不同傳感器的優(yōu)先級(jí)。
21、本發(fā)明進(jìn)一步的方案,步驟s3,包括以下步驟:
22、s31、根據(jù)時(shí)空對(duì)齊數(shù)據(jù)中提取雷達(dá)點(diǎn)云坐標(biāo)、圖像的像素坐標(biāo)、位移增量坐標(biāo),以及步驟s2測(cè)得動(dòng)態(tài)權(quán)重參數(shù),執(zhí)行三軸坐標(biāo)加權(quán)計(jì)算;
23、具體的,防抖慣性傳感器測(cè)算的位移增量坐標(biāo)()、雷達(dá)點(diǎn)云坐標(biāo)()、圖像的像素坐標(biāo)();結(jié)合動(dòng)態(tài)權(quán)重參數(shù):防抖慣性傳感器的權(quán)重系數(shù)為,毫米波雷達(dá)的權(quán)重系數(shù)為,高速攝像頭的權(quán)重系數(shù)為,滿足;
24、對(duì)x、y、z三軸分別執(zhí)行加權(quán)計(jì)算,滿足如下公式:
25、
26、
27、
28、s32、將毫米波雷達(dá)利用空間坐標(biāo)系轉(zhuǎn)換成速度矢量,加權(quán)后的三軸坐標(biāo)數(shù)據(jù)、毫米波雷達(dá)測(cè)得的速度矢量()結(jié)合,生成包含三維坐標(biāo)和速度矢量的跟蹤路徑。
29、本發(fā)明進(jìn)一步的方案,步驟s4,包括以下步驟:
30、基于生成的跟蹤路徑,截取連續(xù)100幀的歷史運(yùn)動(dòng)數(shù)據(jù)作為模型訓(xùn)練基礎(chǔ),每幀數(shù)據(jù)包含目標(biāo)物體的三維坐標(biāo)()、速度矢量()、加速度(),確保100幀數(shù)據(jù)覆蓋至少10秒的運(yùn)動(dòng)時(shí)間窗口,用于捕捉目標(biāo)完整的運(yùn)動(dòng)規(guī)律;
31、將單幀的歷史有效運(yùn)動(dòng)數(shù)據(jù)中的三維坐標(biāo)()、速度矢量()、加速度()組合成九維特征向量,形成時(shí)間序列的歷史訓(xùn)練集;采用lstm網(wǎng)絡(luò)訓(xùn)練并生成運(yùn)動(dòng)模式預(yù)測(cè)模型,以前70幀的九維特征向量作為輸入,以后30幀的三維坐標(biāo)作為輸出,利用歷史訓(xùn)練集訓(xùn)練所述雙層lstm網(wǎng)絡(luò),得到預(yù)測(cè)目標(biāo)物體未來運(yùn)動(dòng)軌跡的運(yùn)動(dòng)模式預(yù)測(cè)模型;
32、采集目標(biāo)物體的當(dāng)前運(yùn)動(dòng)數(shù)據(jù)中的三維坐標(biāo)()、速度矢量()、加速度()組合成九維特征向量;將九維特征向量輸入運(yùn)動(dòng)模式預(yù)測(cè)模型,得到目標(biāo)物體的未來運(yùn)動(dòng)軌跡。
33、本發(fā)明進(jìn)一步的方案,步驟s5,包括以下步驟:
34、根據(jù)運(yùn)動(dòng)模式預(yù)測(cè)模型預(yù)測(cè)目標(biāo)物體的未來運(yùn)動(dòng)軌跡,輸入目標(biāo)物體最近3秒運(yùn)動(dòng)數(shù)據(jù)至所述運(yùn)動(dòng)模式預(yù)測(cè)模型,得到目標(biāo)物體的未來0.5秒運(yùn)動(dòng)軌跡;結(jié)合目標(biāo)物體的未來0.5秒運(yùn)動(dòng)軌跡和實(shí)時(shí)環(huán)境數(shù)據(jù)生成三條候選路徑方案;
35、其中,三條候選路徑方案對(duì)應(yīng)慣性延續(xù)預(yù)測(cè)、鄰近特征匹配預(yù)測(cè)、場(chǎng)景地圖預(yù)判預(yù)測(cè)的三種策略;
36、將獲取毫米波雷達(dá)和視覺傳感器的實(shí)際檢測(cè)位置,將三條候選路徑方案的預(yù)測(cè)坐標(biāo)分別與實(shí)際檢測(cè)坐標(biāo)進(jìn)行逐點(diǎn)比對(duì);
37、x/y平面偏差以圖像的像素為單位,計(jì)算候選路徑與實(shí)際檢測(cè)結(jié)果的x/y平面總偏差,滿足如下公式,
38、
39、其中,表示候選路徑與實(shí)際檢測(cè)結(jié)果的x/y平面總偏差,表示候選路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)在x軸方向的差值,表示候選路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)在y軸方向的差值;
40、x/y平面偏差以圖像的像素為單位,x/y平面總偏差的最大允許偏差閾值為5像素;z軸偏差以米為單位,z軸偏差的最大允許偏差閾值為0.3米;判斷候選路徑是否符合閾值條件,標(biāo)記未超出閾值條件的有效候選路徑,構(gòu)建有效的候選路徑方案集合。
41、本發(fā)明進(jìn)一步的方案,步驟s6,包括以下步驟:
42、結(jié)合有效的候選路徑方案集合,計(jì)算候選預(yù)測(cè)路徑方案的平均偏差系數(shù),滿足如下公式,
43、
44、其中,表示平均偏差系數(shù),表示有效候選路徑的數(shù)量,表示第條候選路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)在x軸方向的差值,表示第條路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)在y軸方向的差值,表示第條路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)在z軸的差值,表示第條路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)的總偏差,表示實(shí)際檢測(cè)值的方差;
45、結(jié)合候選預(yù)測(cè)路徑方案的平均偏差系數(shù),計(jì)算候選預(yù)測(cè)路徑方案的可信度評(píng)分,滿足如下公式,
46、
47、其中,表示可信度評(píng)分,表示有效候選路徑的數(shù)量,表示總候選路徑的數(shù)量,表示平均偏差系數(shù),表示系統(tǒng)預(yù)設(shè)的允許偏差閾值,通常由實(shí)驗(yàn)室多次推算得到的結(jié)果。
48、本發(fā)明進(jìn)一步的方案,步驟s7,包括以下步驟:
49、設(shè)定候選預(yù)測(cè)路徑方案的可信度評(píng)分閾值比較候選預(yù)測(cè)路徑方案的可信度評(píng)分與可信度評(píng)分閾值之間的大小;
50、若是可信度評(píng)分,判定預(yù)測(cè)軌跡為可靠;
51、若是可信度評(píng)分,判定預(yù)測(cè)軌跡不可靠,執(zhí)行修正請(qǐng)求,選用合適的補(bǔ)償方案,包括替換或升級(jí)新的傳感器、重新分配動(dòng)態(tài)權(quán)重、迭代預(yù)測(cè);
52、其中,迭代預(yù)測(cè),重新采集新的歷史訓(xùn)練集,訓(xùn)練并生成修正后的運(yùn)動(dòng)模式預(yù)測(cè)模型;
53、重新分配動(dòng)態(tài)權(quán)重,重新分配毫米波雷達(dá)、高速攝像頭、防抖慣性傳感器的動(dòng)態(tài)權(quán)重系數(shù),生成修正后的預(yù)測(cè)軌跡;
54、替換或升級(jí)新的傳感器,檢測(cè)到傳感器數(shù)據(jù)異常,替換或升級(jí)新的傳感器,基于新組合重新生成修正后的預(yù)測(cè)軌跡;
55、重新修正后的預(yù)測(cè)路徑,重新進(jìn)行可信度評(píng)分,若是可信度評(píng)分,判定預(yù)測(cè)路徑為可靠;若是可信度評(píng)分,判定預(yù)測(cè)軌跡不可靠則執(zhí)行第二次修正請(qǐng)求;若是連續(xù)三次修正失敗,單次修正最多觸發(fā)3次迭代,執(zhí)行重新初始化流程的操作。
56、本發(fā)明進(jìn)一步的方案,步驟s8,包括以下步驟:
57、計(jì)算有效的候選路徑方案集合中的各個(gè)方案與實(shí)際位置的誤差,選擇誤差最小的方案為主要路徑,保留次優(yōu)的方案為備用路徑;計(jì)算每個(gè)有效的候選路徑方案與實(shí)際檢測(cè)位置的三軸坐標(biāo)偏差絕對(duì)值,
58、
59、其中,是三軸坐標(biāo)偏差絕對(duì)值,是候選路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)在x軸方向的差值,是路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)在y軸方向的差值,是路徑預(yù)測(cè)坐標(biāo)與實(shí)際檢測(cè)坐標(biāo)在z軸的差值;
60、預(yù)設(shè)定誤差數(shù)值的最大偏差閾值,比較誤差數(shù)值與最大偏差閾值之間的大小;
61、若是的時(shí)候,選擇誤差最小的方案為主要路徑,保留次優(yōu)的方案為備用路徑;當(dāng)目標(biāo)物體處于復(fù)雜運(yùn)動(dòng)狀態(tài)時(shí),保留兩個(gè)備用路徑;
62、若是的時(shí)候,執(zhí)行重新初始化流程的操作。
63、第二方面,本發(fā)明提供了一種高精度移動(dòng)物體跟蹤ai攝像頭的實(shí)施系統(tǒng),采用如下的技術(shù)方案:
64、數(shù)據(jù)采集模塊,用于獲取目標(biāo)物體的三維坐標(biāo)、視覺圖像序列、運(yùn)動(dòng)狀態(tài)數(shù)據(jù),進(jìn)行跨模態(tài)時(shí)空對(duì)齊校準(zhǔn)異;
65、動(dòng)態(tài)權(quán)重模型構(gòu)建模塊,用于構(gòu)建神經(jīng)網(wǎng)絡(luò)動(dòng)態(tài)權(quán)重模型,實(shí)時(shí)調(diào)整毫米波雷達(dá)、攝像頭和慣性傳感器的數(shù)據(jù)優(yōu)先級(jí);
66、加權(quán)計(jì)算模塊,用于對(duì)校準(zhǔn)后的三軸坐標(biāo)執(zhí)行加權(quán)計(jì)算,結(jié)合速度矢量生成連續(xù)跟蹤路徑;
67、運(yùn)動(dòng)模式預(yù)測(cè)模型構(gòu)建模塊,用于得到預(yù)測(cè)目標(biāo)物體未來運(yùn)動(dòng)軌跡的運(yùn)動(dòng)模式預(yù)測(cè)模型;
68、候選路徑生成和篩選模塊,用于預(yù)判和生成三條候選路徑,篩選有效的候選路徑集合;
69、可信度評(píng)分計(jì)算模塊,用于計(jì)算候選路徑平均偏差系數(shù),結(jié)合偏差閾值及有效路徑比例,輸出預(yù)測(cè)路徑的可信度評(píng)分;
70、流程修正模塊,若可信度評(píng)分未達(dá)閾值,通過迭代模型訓(xùn)練、權(quán)重重分配或傳感器替換進(jìn)行修正;
71、有效預(yù)測(cè)路徑選擇模塊,用于選擇三軸坐標(biāo)偏差最小的有效預(yù)測(cè)路徑作為主要方案,保留次優(yōu)預(yù)測(cè)路徑作備用方案。
72、綜上所述,本發(fā)明包括以下有益技術(shù)效果:
73、1.通過毫米波雷達(dá)、高速攝像頭、防抖慣性傳感器的跨模態(tài)數(shù)據(jù)時(shí)空對(duì)齊,結(jié)合光照、氣象、運(yùn)動(dòng)速度的自適應(yīng)權(quán)重分配模型,雨霧、低光照或高速場(chǎng)景下優(yōu)先選擇可靠性最高的傳感器數(shù)據(jù);
74、2.基于lstm網(wǎng)絡(luò)構(gòu)建的運(yùn)動(dòng)模式預(yù)測(cè)模型,通過歷史九維特征向量學(xué)習(xí)目標(biāo)運(yùn)動(dòng)規(guī)律,并結(jié)合慣性延續(xù)、鄰近特征匹配和場(chǎng)景地圖語義預(yù)判生成多策略候選路徑,通過動(dòng)態(tài)偏差閾值篩選與可信度評(píng)分機(jī)制,系統(tǒng)能自動(dòng)優(yōu)選最貼合實(shí)際軌跡的預(yù)測(cè)路徑;
75、3.當(dāng)可信度評(píng)分未達(dá)標(biāo)時(shí),系統(tǒng)觸發(fā)多重實(shí)時(shí)修正策略,包括傳感器動(dòng)態(tài)權(quán)重迭代調(diào)整、lstm模型增量訓(xùn)練優(yōu)化,以及傳感器故障時(shí)的快速替換;利用三次迭代容錯(cuò)和初始化機(jī)制,有效避免累積誤差,確保在高速突變或傳感器異常等極端工況下仍能維持連續(xù)跟蹤。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!