一種基于圖像處理算法的智能攝像頭系統與優化方法與流程
本發明涉及攝像頭智能系統,尤其涉及一種基于圖像處理算法的智能攝像頭系統與優化方法。
背景技術:
1、在當今數字化和智能化的時代,攝像頭在眾多領域得到了廣泛的應用,如安防監控、智能交通、工業檢測、智能家居等。傳統的攝像頭主要實現圖像的采集和簡單的存儲功能,已難以滿足日益增長的復雜應用需求,對智能攝像頭系統的研發變得至關重要。
2、在安防監控領域,隨著城市規模的不斷擴大和安全需求的日益提高,監控范圍不斷拓展,監控目標也更加多樣化。傳統攝像頭只能進行固定視角的拍攝,無法根據監控場景的變化自動調整參數,對于異常事件的檢測和預警能力有限。當遇到復雜的光照條件,如強光直射、逆光、夜間低光照等情況時,拍攝的圖像往往會出現過曝、欠曝、模糊等問題,導致監控效果大打折扣,難以準確識別目標對象。
3、智能交通系統中,攝像頭用于車輛檢測、交通流量統計、違章行為抓拍等。然而,現有的攝像頭在處理高速移動的車輛和復雜的交通場景時,容易出現目標丟失、識別錯誤等問題。同時,不同時間段和天氣條件下的光照變化,也會對圖像質量產生顯著影響,影響交通數據的準確性和可靠性。
4、工業檢測方面,對產品質量的檢測要求越來越高。傳統攝像頭難以精確識別產品的細微缺陷和特征,無法滿足高精度檢測的需求。而且在工業生產環境中,可能存在灰塵、振動等干擾因素,進一步降低了攝像頭的工作性能。
5、智能家居領域,攝像頭用于家庭安防、老人兒童看護等。但傳統攝像頭缺乏智能化的交互能力,不能根據用戶的需求和場景自動調整拍攝模式和參數,無法提供個性化的服務。
6、在圖像處理算法方面,雖然已經有很多成熟的算法,但單一的算法往往只能解決特定的問題,難以應對復雜多變的實際場景。例如,簡單的圖像去噪算法在去除噪聲的同時可能會模糊圖像的邊緣信息;傳統的目標識別算法在面對復雜背景和相似目標時,識別準確率較低。
7、此外,現有的智能攝像頭系統缺乏有效的反饋機制和自適應調整能力,不能根據圖像質量和實際需求實時調整攝像頭的參數。同時,對采集到的大量圖像數據缺乏有效的存儲和分析手段,無法充分挖掘數據中的潛在價值,為系統的優化和決策提供支持。
8、綜上所述,開發一種基于圖像處理算法的智能攝像頭系統與優化方法具有重要的現實意義,能夠有效解決現有攝像頭系統存在的問題,提高攝像頭的智能化水平和應用效果。
技術實現思路
1、本發明提出的基于圖像處理算法的智能攝像頭系統,以解決上述現有技術中提到的問題。
2、為了實現上述目的,本發明采用了如下技術方案:一種基于圖像處理算法的智能攝像頭系統,包括:
3、圖像采集模塊:采用圖像傳感器實時采集圖像數據,在不同光照條件下采集圖像;
4、圖像預處理模塊:對采集的圖像進行去噪、增強和歸一化處理,去噪采用雙邊濾波算法,增強采用直方圖均衡化算法,歸一化公式為,i為原始圖像像素值,imin和imax分別為圖像像素的最小值和最大值;
5、特征提取模塊:運用局部二值模式(lbp)和方向梯度直方圖(hog)算法提取圖像的紋理和形狀特征,生成特征向量f;
6、目標識別模塊:對特征向量f進行分類識別,確定圖像中的目標對象及其類別c;模型包括卷積層、池化層和全連接層,卷積層通過卷積核提取圖像的深層次特征,池化層對特征圖進行降維處理,全連接層將提取的特征映射到目標類別;
7、決策模塊:根據目標識別結果,結合預設規則和策略生成決策指令d,預設規則和策略考慮目標對象的類別、數量、位置、運動狀態因素,當目標對象數量超過閾值時,調整攝像頭的拍攝范圍;
8、反饋控制模塊:根據決策指令d對攝像頭參數進行調整,調整公式為pnew=pold+δp,pold為原參數值,δp為根據決策指令計算得到的參數調整量。
9、進一步的,還包括:
10、光照補償模塊:實時檢測環境光照強度l,光照補償模塊采用光照傳感器測量環境光照強度,當光照強度不滿足預設范圍[lmin,lmax]時,通過公式對圖像進行光照補償,i為原始圖像像素值,lref為參考光照強度。
11、進一步的,還包括:
12、異常檢測模塊:通過計算圖像的熵值h檢測圖像中的異常區域,異常檢測模塊對圖像進行分塊處理,分別計算每個圖像塊的熵值,熵值計算公式為,p(i)為圖像中灰度值為i的像素出現的概率;當熵值h超出預設閾值hthreshold時,判定圖像存在異常;對于異常區域,系統進行標記、放大觀察和觸發報警機制。
13、進一步的,目標識別模塊中的卷積神經網絡(cnn)采用預訓練模型,通過遷移學習進行微調;預訓練模型在圖像數據集上進行訓練,學習圖像特征和模式;遷移學習過程中,將預訓練模型的參數作為初始值,在目標數據集上進行微調;訓練過程中采用交叉熵損失函數,為真實標簽,為預測標簽。
14、進一步的,決策模塊中的預設規則和策略采用模糊邏輯算法,模糊邏輯算法將目標對象的類別c、大小s和位置p因素進行模糊化處理,映射到不同的模糊集合中;通過預設的模糊推理規則,根據輸入的模糊變量生成相應的決策指令d。
15、進一步的,反饋控制模塊具備自適應調整能力,通過監測調整后的圖像效果,根據圖像質量評估指標動態調整參數調整量δp;采用圖像清晰度評估函數具體為拉普拉斯方差法和對比度評估函數,實時評估圖像質量,當圖像質量不滿足要求時,自動調整攝像頭參數。
16、進一步的,還包括:
17、數據存儲與分析模塊:存儲采集的圖像數據、特征向量、目標識別結果和決策指令信息,數據存儲與分析模塊采用硬盤或云存儲設備,通過數據分析算法,具體為聚類分析和關聯規則挖掘,發現數據中的潛在模式和規律。
18、進一步的,還包括:
19、圖像采集步驟:采用圖像傳感器實時采集圖像數據,圖像傳感器具備4k的分辨率和60fps的幀率;
20、圖像預處理步驟:對采集的圖像進行去噪、增強和歸一化處理,歸一化公式為,去噪采用雙邊濾波算法,增強采用直方圖均衡化算法;
21、特征提取步驟:運用局部二值模式(lbp)和方向梯度直方圖(hog)算法提取圖像的紋理和形狀特征,生成特征向量f;
22、目標識別步驟:基于深度學習模型,具體為卷積神經網絡(cnn),對特征向量f進行分類識別,確定圖像中的目標對象及其類別c,cnn模型采用預訓練和遷移學習的方法進行訓練;
23、決策步驟:根據目標識別結果,結合預設的規則和策略,生成決策指令d,預設規則和策略采用模糊邏輯算法;
24、反饋控制步驟:根據決策指令d對攝像頭的參數具體為焦距、光圈、拍攝角度進行調整,調整公式為pnew=pold+δp。
25、進一步的,在圖像預處理步驟之前,還包括實時檢測環境光照強度l;采用光照傳感器進行檢測,當光照強度不滿足預設范圍[lmin,lmax]時,通過公式對圖像進行光照補償。
26、進一步的,在目標識別步驟之后,還包括計算圖像的熵值h來檢測圖像中的異常區域;對圖像進行分塊處理,分別計算每個圖像塊的熵值,熵值計算公式為,當熵值h超出預設閾值hthreshold時,判定圖像存在異常,并觸發相應的處理機制,具體為標記、放大觀察和報警。
27、與現有的技術相比,本發明的有益效果是:
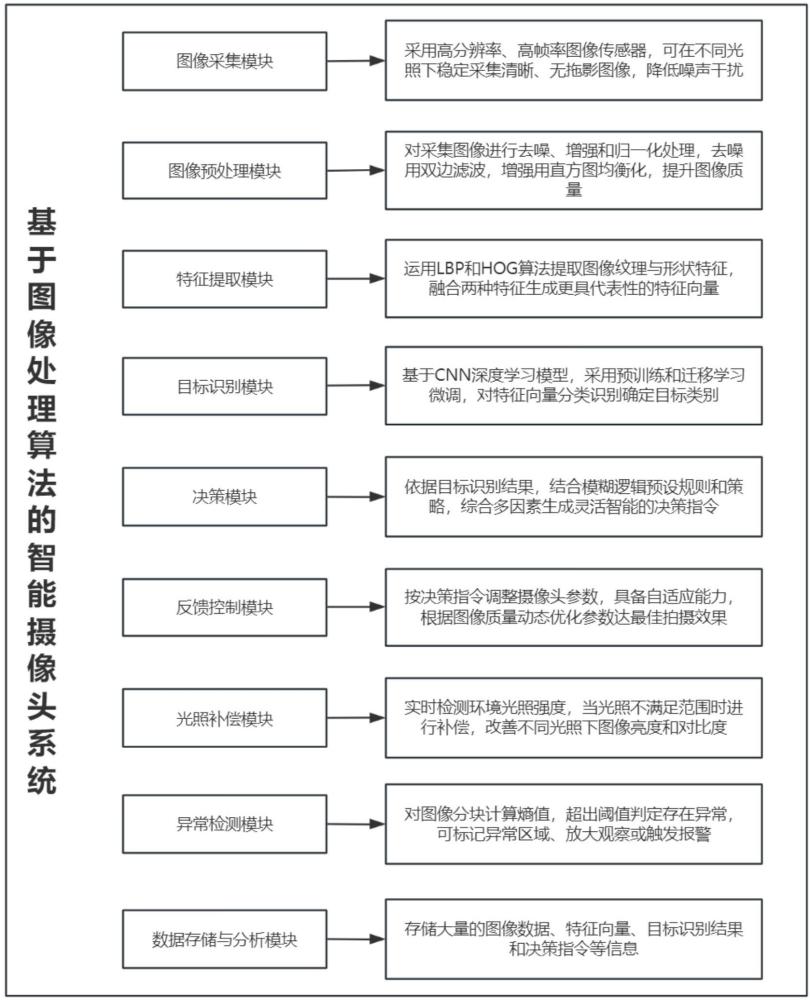
28、在圖像采集和預處理方面,采用高分辨率圖像傳感器,能夠在不同光照條件下穩定采集清晰、無拖影的圖像。圖像預處理模塊運用雙邊濾波和直方圖均衡化算法,結合歸一化處理,有效去除噪聲、增強對比度,提高圖像質量,為后續的特征提取和目標識別提供了良好的數據基礎。
29、光照補償模塊實時檢測環境光照強度,通過光照補償公式對圖像進行處理,可改善不同光照條件下的圖像亮度和對比度,避免過曝、欠曝等問題,確保在強光、弱光、逆光等復雜環境下都能拍攝到清晰、準確的圖像。
30、特征提取模塊融合局部二值模式(lbp)和方向梯度直方圖(hog)算法,提取圖像的紋理和形狀特征,生成更具代表性的特征向量,提高了目標識別的準確率。目標識別模塊基于深度學習的卷積神經網絡(cnn),采用預訓練和遷移學習的方法,能夠快速、準確地識別圖像中的目標對象及其類別。
31、決策模塊采用模糊邏輯算法,結合預設的規則和策略,根據目標識別結果生成靈活、智能的決策指令。反饋控制模塊根據決策指令對攝像頭的參數進行精確調整,并具備自適應調整能力,可根據圖像質量評估指標動態優化參數,確保拍攝效果始終滿足需求。
32、異常檢測模塊通過計算圖像的熵值檢測異常區域,當熵值超出預設閾值時及時判定異常并觸發相應機制,提高了系統的安全性和可靠性。
33、數據存儲與分析模塊對采集的圖像數據、特征向量、目標識別結果和決策指令等信息進行存儲和分析,運用聚類分析和關聯規則挖掘等算法,發現數據中的潛在模式和規律,為系統的優化和決策提供有力依據,實現了智能攝像頭系統的持續改進和升級。
- 還沒有人留言評論。精彩留言會獲得點贊!