基于非均勻彈簧的帶接管承壓設(shè)備的有限元模型建立方法與流程
本發(fā)明涉及帶接管承壓設(shè)備的有限元網(wǎng)格模型的建立方法的,特別是基于非均勻彈簧的帶接管承壓設(shè)備的有限元網(wǎng)格模型建立方法的。
背景技術(shù):
1、特種設(shè)備領(lǐng)域中,筒體、封頭和接管是承壓設(shè)備的常規(guī)組件,通常根據(jù)常規(guī)設(shè)計(jì)標(biāo)準(zhǔn)gb-150或分析設(shè)計(jì)標(biāo)準(zhǔn)gb/t-4732設(shè)計(jì)制造,而在設(shè)計(jì)過程中,通常需要開展有限元分析校核。有限元分析校核需要建立幾何模型、劃分網(wǎng)格、開展計(jì)算、提取應(yīng)力數(shù)據(jù)、依標(biāo)準(zhǔn)評定等一系列步驟,其中,幾何模型建立和網(wǎng)格劃分工作繁雜人工耗時(shí)長,顯著限制了相關(guān)校核的工作效率。在網(wǎng)格劃分方面,由于接管和筒體、封頭連接部位是焊接結(jié)構(gòu),為避免出現(xiàn)應(yīng)力奇異性,特別是在疲勞分析中,需要?jiǎng)澐忠欢ò霃降牡箞A角,如在鍋爐標(biāo)準(zhǔn)gb/t-16508中規(guī)定:應(yīng)用有限元分析驗(yàn)證法時(shí),元件的所有轉(zhuǎn)角處應(yīng)有適當(dāng)?shù)膱A角,且圓角半徑不小于10mm和較厚部分厚度的1/4兩者的較小值。然而,倒圓角顯著改變了接管區(qū)域幾何拓?fù)浣Y(jié)構(gòu),現(xiàn)有技術(shù)一般通過復(fù)雜的人為剖分簡化拓?fù)浣Y(jié)構(gòu),而相關(guān)操作對人員要求高,過程復(fù)雜,通常需要專門的網(wǎng)格劃分軟件(如hypermesh軟件),根據(jù)不同圓角情況通常采用不同的剖分方法,因此,難以實(shí)現(xiàn)程序化和自動(dòng)化,顯著限制了相關(guān)工作效率。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的就是解決現(xiàn)有技術(shù)中的問題,提出基于非均勻彈簧的帶接管承壓設(shè)備的有限元模型建立方法,能夠?qū)崿F(xiàn)由易于劃分的未帶倒圓的參考幾何模型網(wǎng)格通過節(jié)點(diǎn)投影偏置和非均勻剛度彈簧分析生成目標(biāo)模型規(guī)則網(wǎng)格的功能,無需人為剖分,顯著降低了帶倒圓模型網(wǎng)格劃分難度,對相關(guān)領(lǐng)域有一定的參考價(jià)值。
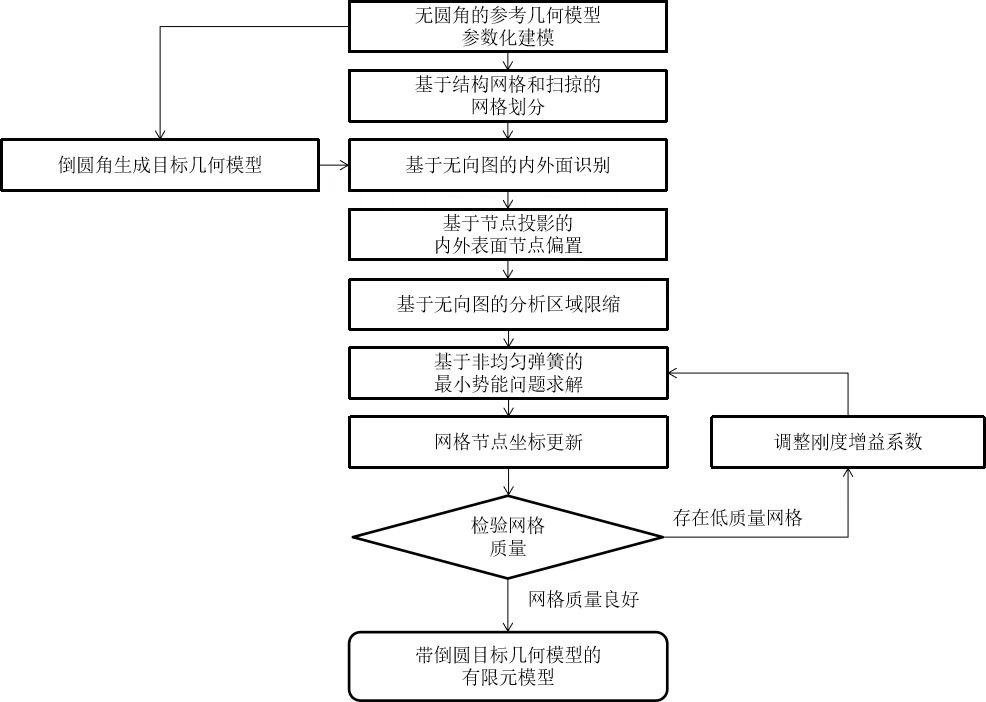
2、為實(shí)現(xiàn)上述目的,本發(fā)明提出了基于非均勻彈簧的帶接管承壓設(shè)備的有限元模型建立方法,包括以下步驟:
3、步驟101,帶接管承壓設(shè)備的參考幾何模型的幾何參數(shù)化和自動(dòng)生成;由程序自動(dòng)化實(shí)現(xiàn)如下步驟;
4、步驟101-1,組件建模和組裝,先依次按參數(shù)化建模方法生成接管、圓筒體和封頭組件;基于兩端截面中心點(diǎn)參數(shù),剛性旋轉(zhuǎn)和平移接管模型和圓筒體模型;基于端部中心點(diǎn)坐標(biāo)、頂部朝向方向矢量,剛性旋轉(zhuǎn)和平移封頭;對所有經(jīng)過剛性旋轉(zhuǎn)和平移的組件進(jìn)行布爾合并;
5、步驟101-2,接管局部區(qū)域的切割,對每一個(gè)接管,基于接管外徑,設(shè)置比例系數(shù),作直徑為的輔助圓柱面切割筒體,形成繞接管的環(huán)形區(qū)域;對每個(gè)接管,作過接管兩端截面中心點(diǎn)且相互垂直的兩個(gè)輔助平面,基于輔助平面切割接管和接管環(huán)形區(qū)域;
6、步驟102,參考幾何模型的內(nèi)外面自動(dòng)識別和參考幾何模型的網(wǎng)格劃分,提取參考幾何模型的全部幾何面,獲得每個(gè)面對應(yīng)的實(shí)體的個(gè)數(shù),即統(tǒng)計(jì)以該面為邊界的實(shí)體的個(gè)數(shù),稱個(gè)數(shù)為1的面為流形面;剔除所有為平面的流形面,對剩余流形面按照相鄰關(guān)系構(gòu)成無向圖;獲得無向圖的連通分支,去除每個(gè)接管的內(nèi)壁面對應(yīng)的連通分支后,剩余的兩個(gè)連通分支即為內(nèi)表面和外表面,由面積大小關(guān)系區(qū)分內(nèi)、外;在接管和環(huán)形區(qū)域劃分結(jié)構(gòu)性網(wǎng)格,剩余區(qū)域沿壁厚生成掃掠網(wǎng)格;
7、步驟103,帶焊接倒圓細(xì)節(jié)的目標(biāo)幾何模型導(dǎo)入和目標(biāo)幾何模型的內(nèi)外面自動(dòng)識別;帶焊接倒圓細(xì)節(jié)的目標(biāo)幾何模型和參考幾何模型相比,僅在焊接倒圓區(qū)域不同且無須劃分網(wǎng)格,可由步驟101中生成的參考幾何模型中添加倒圓特征后獲得;目標(biāo)幾何模型的內(nèi)外面自動(dòng)識別方法與參考幾何模型的內(nèi)外面自動(dòng)識別相同;
8、步驟104,基于節(jié)點(diǎn)投影的網(wǎng)格節(jié)點(diǎn)偏置和基于非均勻彈簧最小勢能原理的網(wǎng)格光順化;
9、其中,基于節(jié)點(diǎn)投影的網(wǎng)格節(jié)點(diǎn)偏置分別獲得參考幾何模型外表面和內(nèi)表面的網(wǎng)格節(jié)點(diǎn);刪除參考幾何模型網(wǎng)格和參考幾何模型之間的關(guān)聯(lián)關(guān)系,生成孤立網(wǎng)格;導(dǎo)入目標(biāo)幾何模型的內(nèi)外幾何表面,將外表面節(jié)點(diǎn)和內(nèi)表面節(jié)點(diǎn)分別按最短距離法投影到目標(biāo)幾何外表面和內(nèi)表面上;記錄投影后的外表面和內(nèi)表面節(jié)點(diǎn)坐標(biāo);
10、基于非均勻彈簧最小勢能原理的網(wǎng)格光順化包括:
11、步驟104-1,分析區(qū)域的限縮,計(jì)算投影前后的所有外表面、內(nèi)表面節(jié)點(diǎn)s的坐標(biāo)差值,設(shè)定閾值,將歐幾里得范數(shù)大于eps的節(jié)點(diǎn)s定義為顯著變形節(jié)點(diǎn)集合;定義包含于同一個(gè)網(wǎng)格單元的兩個(gè)節(jié)點(diǎn)為相鄰節(jié)點(diǎn),并構(gòu)建所有節(jié)點(diǎn)的無向圖g;指定正整數(shù)n,以為起點(diǎn),對g開展廣度優(yōu)先搜索bfs,分別獲得與顯著變形節(jié)點(diǎn)集合距離?n以內(nèi)和恰好距離為n的所有節(jié)點(diǎn),分別記為s′和s′′,分別獲得s′和s′′的相關(guān)單元集合為e′和e′′;取e′和e′′中的全部節(jié)點(diǎn)記為,記e′′的所有相關(guān)節(jié)點(diǎn)為s′′′,取p中在參考幾何模型中屬于流形面的節(jié)點(diǎn),記為p′;取在p′中而不在s中的節(jié)點(diǎn)集合為p′′,記;
12、步驟104-2,構(gòu)建初始彈簧系統(tǒng),遍歷e′中的單元,設(shè)每一個(gè)單元的內(nèi)部節(jié)點(diǎn)編號為,對于任意一對節(jié)點(diǎn),其中,,m為該單元包含的節(jié)點(diǎn)個(gè)數(shù),獲得參考幾何模型中兩節(jié)點(diǎn)之間的距離,在節(jié)點(diǎn)之間,添加初始剛度為的線性彈簧;
13、步驟104-3,基于最小勢能原理的最優(yōu)化計(jì)算,設(shè)線性彈簧的剛度為,設(shè)總勢能為,其中,表示對所有彈簧求和,為迭代步中彈簧的當(dāng)前長度,為初始參考幾何模型中彈簧的原長度,為彈簧兩端節(jié)點(diǎn)編號,是待優(yōu)化的節(jié)點(diǎn)的當(dāng)前三維坐標(biāo),是節(jié)點(diǎn)在參考幾何模型中的三維坐標(biāo),設(shè)置邊界條件:對于節(jié)點(diǎn)?,設(shè)置零值邊界條件,,對于節(jié)點(diǎn),設(shè)置,基于梯度下降法,迭代計(jì)算滿足邊界條件下使最小的;
14、步驟104-4,非均勻剛度增益系數(shù)的添加,基于接管相貫區(qū)域附近的拓?fù)涮攸c(diǎn),取步驟101-1中相貫區(qū)域體的網(wǎng)格單元為,取顯著變形單元集合s的相關(guān)單元為,取集合交集,記為關(guān)鍵網(wǎng)格單元集合;定義共享一個(gè)網(wǎng)格面的兩個(gè)網(wǎng)格單元為相鄰單元;取的相鄰單元集合,取,其中為集合做差運(yùn)算;同理,取的相鄰單元集合,取;分別設(shè)的剛度增益系數(shù)為,將步驟104-2中的由中單元生成的線性彈簧的剛度,增益為初始剛度的倍;作為優(yōu)選,推薦初始取;
15、步驟104-5,調(diào)整增益系數(shù)優(yōu)化網(wǎng)格質(zhì)量,設(shè)定值,以步驟104-3中方法開展計(jì)算,獲得當(dāng)前剛度分布下的最優(yōu)值,以更新節(jié)點(diǎn)坐標(biāo),基于該節(jié)點(diǎn)指標(biāo)下的網(wǎng)格質(zhì)量,修正數(shù)值,反復(fù)迭代,獲得最終的光順化網(wǎng)格。
16、作為優(yōu)選,所述的步驟101中接管由兩端截面中心點(diǎn)三維坐標(biāo)、壁厚、外直徑參數(shù)化表示;圓筒體由兩端截面中心點(diǎn)三維坐標(biāo)、壁厚和外直徑參數(shù)化表示;橢圓形封頭由直邊段高度、壁厚、頂部朝向方向矢量、端部中心點(diǎn)坐標(biāo)、封頭高度、封頭直徑參數(shù)化表示;半球形封頭由內(nèi)直徑、壁厚、頂部朝向方向矢量、端面中心點(diǎn)三維坐標(biāo)參數(shù)化表示。
17、作為優(yōu)選,所述的步驟101-1中布爾合并時(shí)應(yīng)保留內(nèi)部邊界面,對每一個(gè)接管,刪除包含于接管內(nèi)部的附加面。
18、作為優(yōu)選,所述的步驟104-1中取值不大于?mm。
19、作為優(yōu)選,所述的步驟104-1中n取6~10之間的整數(shù)。
20、本發(fā)明基于非均勻彈簧的帶接管承壓設(shè)備的有限元模型建立方法的有益效果:本發(fā)明針對帶焊縫倒圓細(xì)節(jié)結(jié)構(gòu)在有限元?jiǎng)澐志W(wǎng)格時(shí)候,帶焊縫倒圓結(jié)構(gòu)顯著改變了模型的幾何拓?fù)潢P(guān)系,需要人為剖分,無法實(shí)現(xiàn)高效自動(dòng)化的問題,本發(fā)明僅需要對不帶接管焊接倒圓細(xì)節(jié)的參考幾何模型進(jìn)行網(wǎng)格劃分,最終帶倒圓的目標(biāo)幾何模型則由程序通過求解基于非均勻彈簧的一個(gè)最小勢能問題自動(dòng)獲得,避免了對帶倒圓的目標(biāo)幾何模型的人為剖分,顯著提高了帶接管承壓設(shè)備有限元網(wǎng)格模型生成的自動(dòng)化、程序化水平,提高了工作效率;通過引入和彈簧原長成反比的初始剛度(非均勻性的第一個(gè)來源)并設(shè)置三個(gè)彈簧剛度增益系數(shù)(非均勻性的第二個(gè)來源),通過調(diào)整三個(gè)彈簧剛度增益系數(shù),可以交互式地修改網(wǎng)格,進(jìn)一步提升網(wǎng)格質(zhì)量;本發(fā)明提出的建模和網(wǎng)格光順化方法,便于在二次開發(fā)平臺如abaqus?python等中完成開發(fā)和軟件封裝,便于后期直接調(diào)用;本發(fā)明提出的基于無向圖的內(nèi)外表面識別方法,可實(shí)現(xiàn)參考幾何模型和目標(biāo)幾何模型的內(nèi)外表面的自動(dòng)識別,無需人為操作;本發(fā)明提出的基于梯度下降法的非均勻彈簧系統(tǒng)的最小勢能問題的求解方法,避免了矩陣方程的求解,可方便地通過c語言動(dòng)態(tài)鏈接庫等形式編譯實(shí)現(xiàn),運(yùn)算速度快;本發(fā)明提出的分析區(qū)域限縮方法縮小了需要網(wǎng)格光順化的區(qū)域,僅需對顯著變形節(jié)點(diǎn)附近的區(qū)域開展網(wǎng)格光順化計(jì)算,進(jìn)一步提高了計(jì)算效率。
21、本發(fā)明的特征及優(yōu)點(diǎn)將通過實(shí)施例結(jié)合附圖進(jìn)行詳細(xì)說明。
- 還沒有人留言評論。精彩留言會(huì)獲得點(diǎn)贊!