基于混合網(wǎng)絡(luò)和多策略粒子群算法的主噴嘴優(yōu)化方法
本發(fā)明涉及氣流動(dòng)力學(xué)數(shù)據(jù)處理,尤其涉及一種基于混合網(wǎng)絡(luò)和多策略粒子群算法的主噴嘴優(yōu)化方法。
背景技術(shù):
1、主噴嘴是噴氣織機(jī)氣流引緯的關(guān)鍵部件,主噴嘴射流特性直接影響噴氣織機(jī)的效率、能耗和織物的最終質(zhì)量。為了確保噴氣織機(jī)實(shí)現(xiàn)高速氣流引緯,主噴嘴射流需要將緯紗高速、穩(wěn)定的輸送到異形筘中的接力區(qū)域。主噴嘴結(jié)構(gòu)設(shè)計(jì)采取了小喉部截面、異形孔導(dǎo)流槽和大長(zhǎng)徑比的導(dǎo)紗管,滿足“高速度、小流量”的引緯要求。由于,主噴嘴內(nèi)部空間過小且結(jié)構(gòu)復(fù)雜,使用畢托管、熱線式風(fēng)速儀等裝置,難以對(duì)主噴嘴內(nèi)部流場(chǎng)進(jìn)行測(cè)量。因此,采用多物理場(chǎng)計(jì)算流體力學(xué)(cfd)軟件對(duì)主噴嘴內(nèi)部、外部流場(chǎng)進(jìn)行一體化數(shù)值模擬,得到主噴射流中心線上速度及不同截面上的速度特性曲線,揭示主噴嘴結(jié)構(gòu)參數(shù)對(duì)射流速度分布的影響規(guī)律。傳統(tǒng)優(yōu)化方法采用經(jīng)驗(yàn)公式亦或響應(yīng)面優(yōu)化方式,對(duì)復(fù)雜流體的擬合不足和高維變量處理效率低,亦或陷入局部最優(yōu),無法得到最優(yōu)的主噴嘴結(jié)構(gòu)參數(shù)。
技術(shù)實(shí)現(xiàn)思路
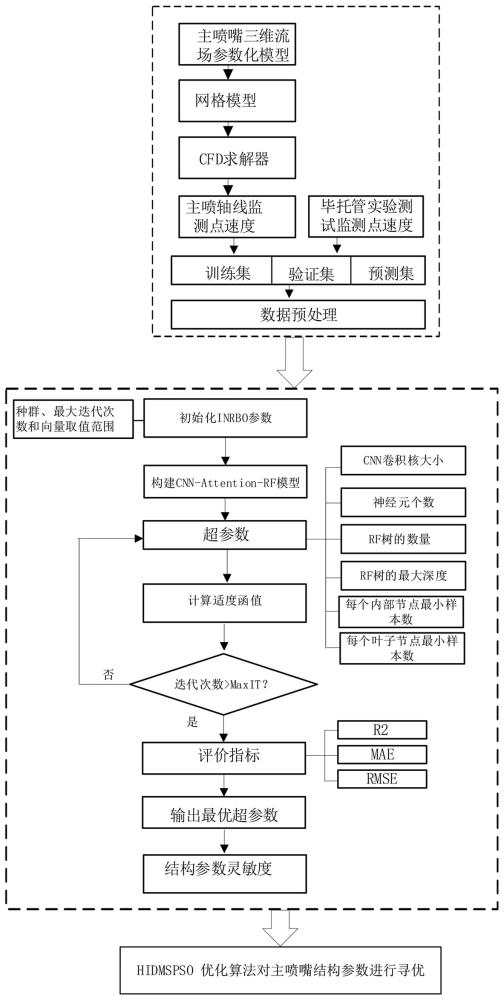
1、本發(fā)明的目的是提供一種基于混合網(wǎng)絡(luò)和多策略粒子群算法的主噴嘴優(yōu)化方法,利用深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)結(jié)合機(jī)器學(xué)習(xí)算法,構(gòu)建一種主噴嘴機(jī)構(gòu)參數(shù)與速度的回歸模型,采用改進(jìn)的inrbo優(yōu)化算法對(duì)cnn-attention-rf回歸模型進(jìn)行超參數(shù)優(yōu)化,通過改進(jìn)的模型預(yù)測(cè)主噴嘴射流沿軸線不同點(diǎn)的速度,繼而使用hidms-pso算法找到代理模型預(yù)測(cè)的最高速度對(duì)應(yīng)的主噴嘴結(jié)構(gòu)參數(shù),提高噴氣織機(jī)引緯效率,降低研發(fā)成本和周期,具有重要的理論意義和工程價(jià)值。
2、為實(shí)現(xiàn)上述目的,本發(fā)明提供了一種基于混合網(wǎng)絡(luò)和多策略粒子群算法的主噴嘴優(yōu)化方法,包括以下步驟:
3、s1、建立主噴嘴的三維流場(chǎng)網(wǎng)絡(luò)模型,選取設(shè)計(jì)參數(shù)的數(shù)據(jù),仿真模擬不同主噴嘴結(jié)構(gòu)對(duì)應(yīng)的三維流場(chǎng)網(wǎng)絡(luò)模型對(duì)應(yīng)的內(nèi)外流場(chǎng)分布規(guī)律,提取中心軸線速度曲線,并設(shè)計(jì)實(shí)驗(yàn)裝置驗(yàn)證中心軸線監(jiān)測(cè)點(diǎn)速度,獲得包含軸線速度和設(shè)計(jì)參數(shù)的數(shù)據(jù)樣本,并對(duì)數(shù)據(jù)樣本進(jìn)行預(yù)處理;
4、s2、構(gòu)建cnn-attention-rf神經(jīng)網(wǎng)絡(luò)模型;
5、s3、基于inrbo算法對(duì)cnn-attention-rf神經(jīng)網(wǎng)絡(luò)模型的超參數(shù)進(jìn)行優(yōu)化;
6、s4、inrbo-cnn-attention-rf模型通過訓(xùn)練預(yù)測(cè)不同結(jié)構(gòu)主噴嘴軸線氣流速度;
7、s5、基于多策略粒子群優(yōu)化算法獲得主噴嘴的最優(yōu)結(jié)構(gòu)參數(shù)。
8、優(yōu)選的,所述s1中,數(shù)據(jù)樣本的獲取具體為:依照主噴嘴設(shè)計(jì)參數(shù)在其對(duì)應(yīng)的取值范圍內(nèi)采用高級(jí)拉丁超立方抽樣取若干個(gè)不同結(jié)構(gòu)數(shù)據(jù),使用計(jì)算流體力學(xué)(cfd)的通用求解器(fluent或star?ccm+)設(shè)置邊界條件、初始條件等具體參數(shù),通過cfd數(shù)值仿真模擬得到不同的主噴嘴射流軸線速度,構(gòu)建深度學(xué)習(xí)的訓(xùn)練集、測(cè)試集樣本。并設(shè)計(jì)畢托管實(shí)驗(yàn)裝置測(cè)試主噴射流軸線速度,對(duì)數(shù)值結(jié)果進(jìn)行驗(yàn)證,構(gòu)建深度學(xué)習(xí)的驗(yàn)證集。
9、優(yōu)選的,所述s2中,cnn-attention-rf神經(jīng)網(wǎng)絡(luò)模型中,卷積神經(jīng)網(wǎng)絡(luò)(cnn)用于對(duì)主噴嘴輸入結(jié)構(gòu)參數(shù)數(shù)據(jù)和輸出軸線射流速度進(jìn)行卷積處理,提取數(shù)據(jù)新特征,增強(qiáng)輸入數(shù)據(jù)與輸出數(shù)據(jù)間的相關(guān)性;注意力機(jī)制(attention)用于對(duì)cnn提取的特征進(jìn)行加權(quán)融合,以便網(wǎng)絡(luò)能夠自動(dòng)關(guān)注對(duì)預(yù)測(cè)更有用的信息;隨機(jī)森林回歸模型(rf)平衡樣本中分布不均勻數(shù)據(jù)的誤差,進(jìn)行回歸預(yù)測(cè)。
10、優(yōu)選的,所述s3中,inrbo算法具體包括以下步驟:
11、1)初始化參數(shù);
12、2)用混沌序列進(jìn)行初始化種群;
13、3)自適應(yīng)慣性權(quán)重計(jì)算,使用動(dòng)態(tài)調(diào)整的慣性權(quán)重;
14、4)應(yīng)用牛頓-拉夫遜搜索策略(nrsr),根據(jù)最優(yōu)解和最差解的差異調(diào)整向量的位置更新;
15、5)判斷隨機(jī)數(shù)是否小于差異因子(df);如果隨機(jī)數(shù)<差異因子則進(jìn)行tao更新,如果隨機(jī)數(shù)≥差異因子則進(jìn)行局部最優(yōu)檢測(cè),當(dāng)局部最優(yōu)檢測(cè)檢測(cè)到最優(yōu)解的改進(jìn)小于預(yù)設(shè)閾值,則增加停滯計(jì)數(shù)器,當(dāng)停滯計(jì)數(shù)器達(dá)到一定次數(shù)時(shí),判定當(dāng)前搜索陷入局部最優(yōu),觸發(fā)混沌擾動(dòng),使用混沌擾動(dòng)logistic映射更新解的位置,對(duì)當(dāng)前位置施加擾動(dòng),使粒子跳出局部最優(yōu)區(qū)域,恢復(fù)全局搜索能力;
16、6)判斷是否迭代終止,如果迭代終止更新收斂曲線記錄最佳,輸出結(jié)果。
17、優(yōu)選的,所述2)中,用混沌序列進(jìn)行初始化種群具體為:
18、使用tent混沌映射初始化向量的位置,通過引入混沌序列,產(chǎn)生更具隨機(jī)性和不可預(yù)測(cè)性的初始化位置,提高算法的探索能力;
19、對(duì)于每個(gè)向量位置,在區(qū)間([0,1])內(nèi)隨機(jī)生成:~uniform(0,1);
20、對(duì)每個(gè)隨機(jī)生成的值應(yīng)用tent映射:;
21、將混沌序列映射到指定的搜索空間范圍:;
22、其中, ub為搜索空間的上界, lb為搜索空間的下界, d是tent映射的參數(shù)。
23、優(yōu)選的,所述3)中,
24、慣性權(quán)重公式:;
25、其中,為當(dāng)前迭代的慣性權(quán)重,為當(dāng)前迭代次數(shù),為最大迭代次數(shù),為慣性權(quán)重的最大值,為慣性權(quán)重的最小值, α為控制sigmoid函數(shù)的陡峭程度, β為控制sigmoid函數(shù)的中心位置。
26、優(yōu)選的,所述4)中,nrsr搜索具體包括:
27、計(jì)算 δx,;
28、計(jì)算第一個(gè)nrsr,
29、,是一個(gè)從標(biāo)準(zhǔn)正態(tài)分布中采樣的隨機(jī)數(shù)。
30、提出三項(xiàng)差分算子,改進(jìn)參數(shù) ρ,將種群引導(dǎo)到正確的方向,提高nrbo算法計(jì)算效率,提出的 ρ參數(shù)的表達(dá)式如下所示:
31、;
32、;
33、;
34、;
35、該式中的 r 1 ,?r 2 ,r 3和 r 4是從總體中隨機(jī)選擇的不同整數(shù),是最好向量位置,是向量當(dāng)前位置,會(huì)被不斷更新。
36、更新位置,;
37、計(jì)算和,;
38、計(jì)算第二個(gè)nrsr,;
39、其中, δx為用于調(diào)整當(dāng)前解的一個(gè)隨機(jī)擾動(dòng),
40、nrsr為一種基于隨機(jī)擾動(dòng)的搜索規(guī)則,
41、分別為通過隨機(jī)權(quán)重組合position、生成新的搜索方向,
42、位置更新為根據(jù)位置的值選擇不同的更新策略,
43、第二個(gè)nrsr為進(jìn)一步調(diào)整搜索方向,增加搜索的多樣性和靈活性。
44、優(yōu)選的,所述s5中,多策略粒子群算法將粒子群分成若干個(gè)單元,每個(gè)單元中包含有一個(gè)主粒子和若干個(gè)從粒子,同一單元內(nèi)的粒子相互交互,并與其他單元進(jìn)行信息交換。
45、優(yōu)選的,多策略粒子群算法的初始種群被劃分為兩個(gè)相等的同構(gòu)亞群和異構(gòu)亞群,同構(gòu)亞群使用經(jīng)典pso算法更新方程,異構(gòu)亞種群形成 n p個(gè)單元結(jié)構(gòu),并采取向內(nèi)移動(dòng)策略或向外移動(dòng)策略,向內(nèi)移動(dòng)策略將粒子引導(dǎo)到同一單元,向外移動(dòng)策略使用不同單元的樣本來引導(dǎo)粒子。
46、優(yōu)選的,所述向內(nèi)移動(dòng)策略利用從所有單元成員獲得的位置信息為粒子提供指導(dǎo),
47、主粒子隨機(jī)選擇下列三個(gè)方程中的任意一個(gè)來更新它們的速度:
48、;
49、;
50、;
51、其中:為主粒子速度,為主粒子在時(shí)刻 t的位置,為第 n個(gè)單元中位置相似度最小的從粒子,是第 n個(gè)單元最適合的從粒子的位置,是所有從粒子在主粒子當(dāng)前單元內(nèi)的平均位置, ω是慣性權(quán)重,常數(shù) c 1和 c 2為加速系數(shù), r 1和 r 2是隨機(jī)向量∈[0,1];
52、從粒子采用以下公式進(jìn)行移動(dòng):
53、;
54、其中,為從粒子速度, p best為粒子在時(shí)刻 t找到的最佳位置,為從粒子位置,為第 n個(gè)單元的主粒子位置;
55、向外移動(dòng)策略為粒子提供來自群體中不同單元的引導(dǎo),同時(shí)保持層次結(jié)構(gòu),
56、主粒子隨機(jī)選擇下列三個(gè)方程中的任意一個(gè)來更新它們的速度:
57、;
58、;
59、;
60、其中,為主粒子速度,為第 n個(gè)單元中粒子的平均位置,為隨機(jī)選擇單元的主粒子位置,是粒子自身單元成員的平均位置;
61、從粒子使用以下速度更新方程向?qū)儆诹硪粋€(gè)單元的相同類型的隨機(jī)從粒子移動(dòng):。
62、本發(fā)明所述的基于混合網(wǎng)絡(luò)和多策略粒子群算法的主噴嘴優(yōu)化方法,利用深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)結(jié)合機(jī)器學(xué)習(xí)算法,構(gòu)建一種主噴嘴機(jī)構(gòu)參數(shù)與速度的回歸模型,采用改進(jìn)的inrbo優(yōu)化算法對(duì)cnn-attention-rf回歸模型進(jìn)行超參數(shù)優(yōu)化,通過改進(jìn)的模型預(yù)測(cè)主噴嘴射流沿軸線不同點(diǎn)的速度,繼而使用hidms-pso算法找到代理模型預(yù)測(cè)的最高速度對(duì)應(yīng)的主噴嘴結(jié)構(gòu)參數(shù),提高噴氣織機(jī)引緯效率,降低研發(fā)成本和周期,具有重要的理論意義和工程價(jià)值。
63、下面通過附圖和實(shí)施例,對(duì)本發(fā)明的技術(shù)方案做進(jìn)一步的詳細(xì)描述。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!