基于港口監(jiān)控?cái)?shù)據(jù)分析的安全預(yù)警方法及系統(tǒng)與流程
本發(fā)明涉及港口安全監(jiān)控,尤其是涉及基于港口監(jiān)控?cái)?shù)據(jù)分析的安全預(yù)警方法及系統(tǒng)。
背景技術(shù):
1、隨著全球貿(mào)易的快速發(fā)展,港口作為國(guó)際貿(mào)易的重要樞紐,其安全、高效、環(huán)保運(yùn)行日益受到關(guān)注。然而,傳統(tǒng)的港口監(jiān)控方式已難以滿(mǎn)足現(xiàn)代港口運(yùn)營(yíng)的需求。多源監(jiān)控?cái)?shù)據(jù)的分散與孤島化、數(shù)據(jù)利用率低、安全預(yù)警滯后性以及監(jiān)控手段單一等問(wèn)題日益凸顯,所以亟需一種能夠基于港口監(jiān)控?cái)?shù)據(jù)的安全預(yù)警方法及系統(tǒng)。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的是提供一種能夠基于港口監(jiān)控?cái)?shù)據(jù)分析而進(jìn)行及時(shí)安全預(yù)警的方法及系統(tǒng)。
2、本發(fā)明公開(kāi)了基于港口監(jiān)控?cái)?shù)據(jù)分析的安全預(yù)警方法,包括:
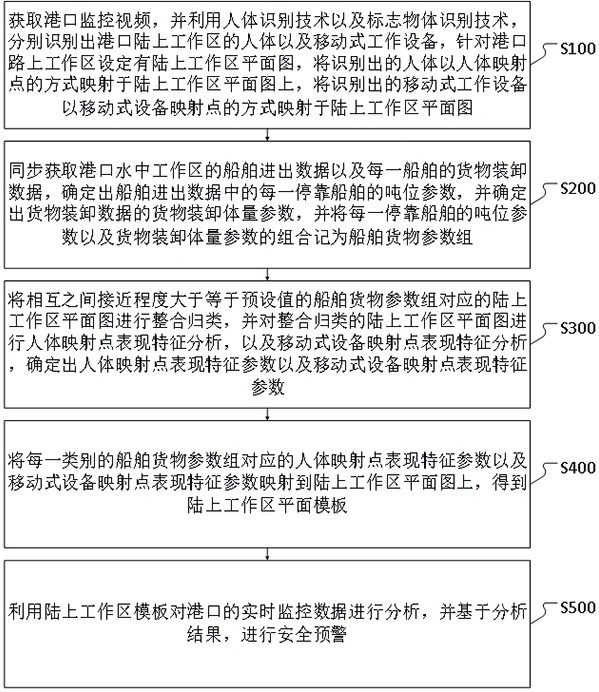
3、獲取港口監(jiān)控視頻,并利用人體識(shí)別技術(shù)以及標(biāo)志物體識(shí)別技術(shù),分別識(shí)別出港口陸上工作區(qū)的人體以及移動(dòng)式工作設(shè)備,針對(duì)港口路上工作區(qū)設(shè)定有陸上工作區(qū)平面圖,將識(shí)別出的人體以人體映射點(diǎn)的方式映射于陸上工作區(qū)平面圖上,將識(shí)別出的移動(dòng)式工作設(shè)備以移動(dòng)式設(shè)備映射點(diǎn)的方式映射于陸上工作區(qū)平面圖;
4、同步獲取港口水中工作區(qū)的船舶進(jìn)出數(shù)據(jù)以及每一船舶的貨物裝卸數(shù)據(jù),確定出船舶進(jìn)出數(shù)據(jù)中的每一停靠船舶的噸位參數(shù),并確定出貨物裝卸數(shù)據(jù)的貨物裝卸體量參數(shù),并將每一停靠船舶的噸位參數(shù)以及貨物裝卸體量參數(shù)的組合記為船舶貨物參數(shù)組;
5、將相互之間接近程度大于等于預(yù)設(shè)值的船舶貨物參數(shù)組對(duì)應(yīng)的陸上工作區(qū)平面圖進(jìn)行整合歸類(lèi),并對(duì)整合歸類(lèi)的陸上工作區(qū)平面圖進(jìn)行人體映射點(diǎn)表現(xiàn)特征分析,以及移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征分析,確定出人體映射點(diǎn)表現(xiàn)特征參數(shù)以及移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征參數(shù);
6、將每一類(lèi)別的船舶貨物參數(shù)組對(duì)應(yīng)的人體映射點(diǎn)表現(xiàn)特征參數(shù)以及移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征參數(shù)映射到陸上工作區(qū)平面圖上,得到陸上工作區(qū)平面模板;
7、利用陸上工作區(qū)模板對(duì)港口的實(shí)時(shí)監(jiān)控?cái)?shù)據(jù)進(jìn)行分析,并基于分析結(jié)果,進(jìn)行安全預(yù)警。
8、在本發(fā)明公開(kāi)的一些實(shí)施例中,利用人體識(shí)別技術(shù)以及標(biāo)志物識(shí)別技術(shù),分別識(shí)別出港口陸上工作區(qū)的人體以及移動(dòng)式工作設(shè)備的方法包括:
9、利用人體識(shí)別技術(shù)對(duì)人體進(jìn)行檢測(cè),包括對(duì)監(jiān)控視頻圖像進(jìn)行邊緣檢測(cè)、形狀分析以及運(yùn)動(dòng)檢測(cè),確定出監(jiān)控視頻圖像中的符合人體特征的圖像區(qū)域,并對(duì)符合人體特征的圖像區(qū)域進(jìn)行標(biāo)記;
10、利用標(biāo)志物識(shí)別技術(shù)對(duì)移動(dòng)式工作設(shè)備進(jìn)行檢測(cè),包括對(duì)監(jiān)控視頻圖像繼進(jìn)行邊緣檢測(cè)、形狀分析以及運(yùn)動(dòng)檢測(cè),確定出監(jiān)控視頻圖像中符合工作設(shè)備特征的圖像區(qū)域,并對(duì)符合工作工作設(shè)備特征的圖像區(qū)域進(jìn)行標(biāo)記。
11、在本發(fā)明公開(kāi)的一些實(shí)施例中,針對(duì)港口陸上工作區(qū)設(shè)定有陸上工作區(qū)平面圖,將識(shí)別出的人體以及移動(dòng)式工作設(shè)備,以映射點(diǎn)的方式映射于陸上工作區(qū)平面圖的方法包括:
12、基于港口的涉設(shè)計(jì)圖紙,構(gòu)建陸上工作區(qū)平面圖,并在陸上工作區(qū)平面圖劃分若干核心工作區(qū),并針對(duì)陸上工作區(qū)平面圖設(shè)定平面圖坐標(biāo)系;
13、對(duì)每一監(jiān)控視頻圖像配置圖像坐標(biāo)系,并確定出監(jiān)控視頻圖像拍攝的區(qū)域與陸上工作區(qū)平面圖的對(duì)應(yīng)關(guān)系,并將圖像坐標(biāo)系和平面圖坐標(biāo)系進(jìn)行對(duì)應(yīng)匹配;
14、確定出監(jiān)控視頻圖像上的人體圖像區(qū)域以及工作設(shè)備圖像區(qū)域,并確定出人體圖像區(qū)域的第一區(qū)域中心點(diǎn)以及工作設(shè)備圖像區(qū)域的第二區(qū)域中心點(diǎn);
15、將第一區(qū)域中心點(diǎn)相對(duì)監(jiān)控視頻圖像中的位置坐標(biāo)轉(zhuǎn)換成陸上工作區(qū)平面圖中的位置坐標(biāo),并以人體映射點(diǎn)的方式在陸上工作區(qū)平面圖上進(jìn)行映射,將第二區(qū)域中心點(diǎn)相對(duì)監(jiān)控視頻圖像中的位置坐標(biāo)轉(zhuǎn)換成陸上工作區(qū)平面圖中的位置坐標(biāo),并以移動(dòng)式設(shè)備映射點(diǎn)的方式在陸上工作區(qū)平面圖上進(jìn)行映射。
16、在本發(fā)明公開(kāi)的一些實(shí)施例中,確定船舶貨物參數(shù)組之間的接近程度的方法包括:
17、針對(duì)港口每一停泊位的船舶的噸位參數(shù)進(jìn)行確定,并按照停泊位之間的序次,對(duì)噸位參數(shù)進(jìn)行排序,并將每一船舶的貨物裝卸體量參數(shù)配置于對(duì)應(yīng)的噸位參數(shù)之后,得到船舶貨物參數(shù)組;
18、基于時(shí)間發(fā)生先后關(guān)系,將船舶貨物參數(shù)組進(jìn)行時(shí)間排序,得到船舶貨物參數(shù)組序列;
19、對(duì)應(yīng)于船舶貨物參數(shù)組序列中的每一船舶位的噸位參數(shù)的變化,構(gòu)建噸位變化曲線,針對(duì)每一船舶位對(duì)應(yīng)的貨物裝卸體量參數(shù)的變化,構(gòu)建貨物裝卸體量變化曲線,對(duì)噸位變化曲線進(jìn)行分析,確定出噸位變化曲線中,噸位參數(shù)變化速率大于等于預(yù)設(shè)值的第一突變區(qū)段,并對(duì)第一突變區(qū)段的中點(diǎn)進(jìn)行標(biāo)記,記為第一突變參考節(jié)點(diǎn),對(duì)貨物裝卸體量變化曲線進(jìn)行分析,確定出貨物裝在體量變化曲線中,裝卸體量參數(shù)變化速率變化速率大于等于預(yù)設(shè)值的第二突變區(qū)段,并對(duì)第二突變區(qū)塊的中點(diǎn)進(jìn)行標(biāo)記,記為第二突變參考節(jié)點(diǎn);
20、針對(duì)第一突變參考節(jié)點(diǎn)之間的距離,構(gòu)建第一節(jié)點(diǎn)間距離序列,針對(duì)第二突變參考節(jié)點(diǎn)之間的距離,構(gòu)建第二節(jié)點(diǎn)間距離序列,并通過(guò)比對(duì)第一節(jié)點(diǎn)間距離序列之間的對(duì)稱(chēng)性以及第二節(jié)點(diǎn)間距離序列之間的對(duì)稱(chēng)性,將相對(duì)應(yīng)的噸位變化曲線以及貨物裝卸體量變化曲線進(jìn)行對(duì)齊,并確定出每一相對(duì)應(yīng)曲線之間的曲線吻合參數(shù),并基于每一相對(duì)應(yīng)曲線的曲線吻合參數(shù),確定出船舶貨物參數(shù)組之間的接近程度。
21、在本發(fā)明公開(kāi)的一些實(shí)施例中,確定相對(duì)應(yīng)曲線之間的曲線吻合參數(shù)的方法包括:
22、確定曲線上的突變區(qū)段以及非突變區(qū)段,并分別針對(duì)突變區(qū)段設(shè)定第一關(guān)注權(quán)重系數(shù),針對(duì)非突變區(qū)塊設(shè)定第二關(guān)注權(quán)重系數(shù);
23、對(duì)曲線的不同位置節(jié)點(diǎn)的縱向差異值,若縱向差異值小于等于預(yù)設(shè)值,則認(rèn)定對(duì)應(yīng)的位置節(jié)點(diǎn)位相吻合位置節(jié)點(diǎn),基于每一區(qū)段的相吻合位置節(jié)點(diǎn)與所有位置節(jié)點(diǎn)的節(jié)點(diǎn)數(shù)量比值,確定區(qū)段的子曲線吻合參數(shù);
24、基于曲線上每一區(qū)段的關(guān)注權(quán)重系數(shù)以及子吻合參數(shù),確定出曲線之間的曲線吻合參數(shù);
25、其中,計(jì)算曲線吻合參數(shù)的表達(dá)式為:
26、;
27、其中,w為曲線吻合參數(shù),為子吻合參數(shù)標(biāo)準(zhǔn)判斷函數(shù),用于判斷子吻合參數(shù)是否符合預(yù)設(shè)標(biāo)準(zhǔn),若符合預(yù)設(shè)標(biāo)準(zhǔn),則輸出1,否則輸出0,為曲線中第i個(gè)區(qū)段對(duì)應(yīng)的相吻合位置節(jié)點(diǎn)數(shù)量,為曲線中第i區(qū)段對(duì)應(yīng)的所有位置節(jié)點(diǎn)數(shù)量,n為曲線中突變區(qū)段以及非突變區(qū)段的總數(shù),為第i個(gè)區(qū)段的關(guān)注權(quán)重系數(shù),c為子吻合參數(shù)吻合調(diào)整常數(shù)。
28、在本發(fā)明公開(kāi)的一些實(shí)施例中,基于每一相對(duì)應(yīng)曲線的曲線吻合參數(shù),確定出船舶貨物參數(shù)組之間的接近程度的方法包括:
29、針對(duì)每一曲線設(shè)定有若干子吻合參數(shù)區(qū)間,每一子吻合參數(shù)區(qū)間對(duì)應(yīng)設(shè)定有子接近程度,通過(guò)判斷出每一曲線的子吻合參數(shù)所屬的子吻合參數(shù)區(qū)間,確定出每一曲線對(duì)應(yīng)的子接近程度,計(jì)算所有曲線的子接近程度的累加和,得到船舶貨物參數(shù)組之間的接近程度。
30、在本發(fā)明公開(kāi)的一些實(shí)施例中,對(duì)整合歸類(lèi)的陸上工作區(qū)平面圖進(jìn)行人體映射點(diǎn)表現(xiàn)特征分析,以及移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征分析的方法包括:
31、建立時(shí)間參考線,對(duì)時(shí)間參考線上不同時(shí)間節(jié)點(diǎn)對(duì)應(yīng)的陸上工作區(qū)平面圖表現(xiàn)狀態(tài)進(jìn)行分析,分析方法包括相對(duì)陸上工作區(qū)平面圖隨機(jī)選定若干隨機(jī)坐標(biāo),并確定出每一隨機(jī)坐標(biāo)附近預(yù)設(shè)范圍內(nèi)的人體映射點(diǎn)的人體映射點(diǎn)數(shù)量,以及移動(dòng)式設(shè)備映射點(diǎn)的移動(dòng)式設(shè)備映射點(diǎn)數(shù)量,計(jì)算出所有隨機(jī)坐標(biāo)的平均人體映射點(diǎn)數(shù)量以及平均移動(dòng)式設(shè)備映射點(diǎn)數(shù)量;
32、確定出每一隨機(jī)坐標(biāo)的人體映射點(diǎn)數(shù)量相比較平均人體映射點(diǎn)數(shù)量的人體映射點(diǎn)倍數(shù),若人體映射點(diǎn)倍數(shù)大于等于預(yù)設(shè)值,則將所述隨機(jī)坐標(biāo)認(rèn)定為人體映射點(diǎn)密集坐標(biāo),確定出每一隨機(jī)坐標(biāo)的移動(dòng)式設(shè)備映射點(diǎn)數(shù)量相比較平均移動(dòng)式設(shè)備映射點(diǎn)數(shù)量的移動(dòng)式設(shè)備映射點(diǎn)倍數(shù),若移動(dòng)式設(shè)備映射點(diǎn)倍數(shù)大于等于預(yù)設(shè)值,則將所述隨機(jī)坐標(biāo)認(rèn)定為移動(dòng)式設(shè)備映射點(diǎn)密集坐標(biāo);
33、將人體映射點(diǎn)密集坐標(biāo)以及對(duì)應(yīng)的人體映射點(diǎn)數(shù)量認(rèn)定為子人體映射點(diǎn)表現(xiàn)特征參數(shù),并將子人體映射點(diǎn)表現(xiàn)特征參數(shù)按照時(shí)間參考線進(jìn)行排序,得到人體映射點(diǎn)表現(xiàn)特征參數(shù),將移動(dòng)式設(shè)備映射點(diǎn)密集坐標(biāo)以及對(duì)應(yīng)的移動(dòng)式設(shè)備映射點(diǎn)數(shù)量的組合認(rèn)定為子移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征參數(shù),并將子移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征參數(shù)按照時(shí)間參考線進(jìn)行排序,得到移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征參數(shù)。
34、在本發(fā)明公開(kāi)的一些實(shí)施例中,將人體映射點(diǎn)表現(xiàn)特征參數(shù)以及移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征參數(shù)映射到陸上工作去平面圖上的方法包括:
35、針對(duì)參考時(shí)間線的每一時(shí)間節(jié)點(diǎn)構(gòu)建有陸上工作區(qū)平面圖,基于不同時(shí)間節(jié)點(diǎn)對(duì)應(yīng)的人體映射點(diǎn)密集坐標(biāo)以及對(duì)應(yīng)的人體映射點(diǎn)數(shù)量,在陸上工作區(qū)平面圖上設(shè)置若干標(biāo)志人體映射點(diǎn),并將人體映射點(diǎn)數(shù)量記錄于對(duì)應(yīng)的標(biāo)志人體映射點(diǎn);
36、基于不同時(shí)間節(jié)點(diǎn)對(duì)應(yīng)的移動(dòng)式設(shè)備映射點(diǎn)密集坐標(biāo)以及對(duì)應(yīng)的移動(dòng)式設(shè)備映射點(diǎn)數(shù)量,在陸上工作區(qū)平面圖上設(shè)置若干標(biāo)志移動(dòng)式設(shè)備映射點(diǎn),并將移動(dòng)式設(shè)備映射點(diǎn)數(shù)量記錄于對(duì)應(yīng)的標(biāo)志移動(dòng)式設(shè)備映射點(diǎn),得到陸上工作區(qū)平面模板。
37、在本發(fā)明公開(kāi)的一些實(shí)施例中,還公開(kāi)有基于港口監(jiān)控?cái)?shù)據(jù)分析的安全預(yù)警系統(tǒng),包括:
38、第一模塊,用于獲取港口監(jiān)控視頻,并利用人體識(shí)別技術(shù)以及標(biāo)志物體識(shí)別技術(shù),分別識(shí)別出港口陸上工作區(qū)的人體以及移動(dòng)式工作設(shè)備,針對(duì)港口路上工作區(qū)設(shè)定有陸上工作區(qū)平面圖,將識(shí)別出的人體以人體映射點(diǎn)的方式映射于陸上工作區(qū)平面圖上,將識(shí)別出的移動(dòng)式工作設(shè)備以移動(dòng)式設(shè)備映射點(diǎn)的方式映射于陸上工作區(qū)平面圖;
39、第二模塊,用于同步獲取港口水中工作區(qū)的船舶進(jìn)出數(shù)據(jù)以及每一船舶的貨物裝卸數(shù)據(jù),確定出船舶進(jìn)出數(shù)據(jù)中的每一停靠船舶的噸位參數(shù),并確定出貨物裝卸數(shù)據(jù)的貨物裝卸體量參數(shù),并將每一停靠船舶的噸位參數(shù)以及貨物裝卸體量參數(shù)的組合記為船舶貨物參數(shù)組;
40、第三模塊,用于將相互之間接近程度大于等于預(yù)設(shè)值的船舶貨物參數(shù)組對(duì)應(yīng)的陸上工作區(qū)平面圖進(jìn)行整合歸類(lèi),并對(duì)整合歸類(lèi)的陸上工作區(qū)平面圖進(jìn)行人體映射點(diǎn)表現(xiàn)特征分析,以及移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征分析,確定出人體映射點(diǎn)表現(xiàn)特征參數(shù)以及移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征參數(shù);
41、第四模塊,用于將每一類(lèi)別的船舶貨物參數(shù)組對(duì)應(yīng)的人體映射點(diǎn)表現(xiàn)特征參數(shù)以及移動(dòng)式設(shè)備映射點(diǎn)表現(xiàn)特征參數(shù)映射到陸上工作區(qū)平面圖上,得到陸上工作區(qū)平面模板;
42、第五模塊,用于利用陸上工作區(qū)模板對(duì)港口的實(shí)時(shí)監(jiān)控?cái)?shù)據(jù)進(jìn)行分析,并基于分析結(jié)果,進(jìn)行安全預(yù)警。
43、本發(fā)明公開(kāi)了基于港口監(jiān)控?cái)?shù)據(jù)分析的安全預(yù)警方法及系統(tǒng),涉及港口安全監(jiān)控技術(shù)領(lǐng)域,從港口監(jiān)控視頻中識(shí)別出陸上工作區(qū)的人體及移動(dòng)式工作設(shè)備,并將其映射至陸上工作區(qū)平面圖上;同步獲取港口水中工作區(qū)的船舶進(jìn)出及貨物裝卸數(shù)據(jù),確定每艘停靠船舶的噸位與貨物裝卸體量,形成船舶貨物參數(shù)組;對(duì)接近程度大于等于預(yù)設(shè)值的船舶貨物參數(shù)組對(duì)應(yīng)的陸上工作區(qū)平面圖進(jìn)行整合歸類(lèi),并分析人體與移動(dòng)式設(shè)備映射點(diǎn)的表現(xiàn)特征,得出特征參數(shù);將這些特征參數(shù)映射回陸上工作區(qū)平面圖,形成平面模板,用于對(duì)港口的實(shí)時(shí)監(jiān)控?cái)?shù)據(jù)進(jìn)行分析,并基于分析結(jié)果進(jìn)行安全預(yù)警,本發(fā)明的上述技術(shù)方案實(shí)現(xiàn)了對(duì)港口的安全預(yù)警,提升了港口運(yùn)轉(zhuǎn)的安全性。
44、下面通過(guò)附圖和實(shí)施例,對(duì)本發(fā)明的技術(shù)方案做進(jìn)一步的詳細(xì)描述。
- 一種基于圖分區(qū)技術(shù)的高速公路...
- 自動(dòng)駕駛車(chē)輛遇障處理方法及裝...
- 車(chē)道多主體動(dòng)態(tài)合作博弈方法、...
- 一種確定車(chē)輛路線的晝夜停車(chē)場(chǎng)...
- 一種基于人工智能的交通氣象信...
- 一種有毒氣體探測(cè)報(bào)警系統(tǒng)及方...
- 一種可燃?xì)怏w報(bào)警器的制作方法
- 一種煤炭班組的數(shù)字化生產(chǎn)運(yùn)行...
- 一種礦山地質(zhì)災(zāi)害自動(dòng)監(jiān)測(cè)預(yù)警...
- 一種船舶輔助檢測(cè)系統(tǒng)的制作方...
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!