構(gòu)網(wǎng)型柔直系統(tǒng)穩(wěn)定性提升的方法、系統(tǒng)、設(shè)備和介質(zhì)與流程
本發(fā)明屬于高壓輸電,具體涉及一種構(gòu)網(wǎng)型柔直系統(tǒng)穩(wěn)定性提升的方法、系統(tǒng)、設(shè)備和介質(zhì)。
背景技術(shù):
1、與陸上風(fēng)電相比送端風(fēng)電具有資源豐富、發(fā)電利用小時(shí)數(shù)高、不占用土地、不消耗水資源和適宜大規(guī)模開發(fā)的優(yōu)點(diǎn)。基于模塊化多電平換流器的高壓直流技術(shù)(modularmultilevel?converter-high?voltage?direct?current,mmc-hvdc)是一種適合海上風(fēng)電場(chǎng)的遠(yuǎn)距離輸電技術(shù)。為了向不使用鎖相環(huán)(phase?locked?loop,pll)的電力系統(tǒng)提供支持,新能源發(fā)電系統(tǒng)和柔直的各種構(gòu)網(wǎng)型控制方法已被提出,包括下垂控制、功率同步控制,虛擬同步機(jī)/虛擬同步發(fā)電機(jī),匹配控制和虛擬振蕩控制等,虛擬同步機(jī)的動(dòng)態(tài)功率解耦可以增強(qiáng)系統(tǒng)的穩(wěn)定性。這些方法已有文獻(xiàn)進(jìn)行充分的評(píng)估和討論。并有分析表明,風(fēng)機(jī)和模塊化多電平柔性直流輸電系統(tǒng)(mmc-hvdc)應(yīng)用在弱電網(wǎng)中采用構(gòu)網(wǎng)型控制更具優(yōu)勢(shì)。
2、目前,與風(fēng)機(jī)側(cè)換流站相連的風(fēng)機(jī)運(yùn)行狀態(tài)受天氣影響較為多變、不確定性強(qiáng),而交流電網(wǎng)運(yùn)行工況也同樣較為復(fù)雜,而現(xiàn)有技術(shù)中對(duì)于風(fēng)電場(chǎng)的調(diào)控策略較為單一,在風(fēng)電場(chǎng)與電網(wǎng)協(xié)同工作時(shí)存在的多種不確定因素將會(huì)引起的功率、電壓的頻繁突變的情況,缺少靈活多樣的調(diào)控策略,在風(fēng)電場(chǎng)復(fù)雜工作場(chǎng)景中,柔直系統(tǒng)為網(wǎng)側(cè)電網(wǎng)提供平穩(wěn)的頻率支撐仍存在著進(jìn)一步優(yōu)化的空間。
技術(shù)實(shí)現(xiàn)思路
1、為克服上述現(xiàn)有技術(shù)的不足,本發(fā)明提出一種構(gòu)網(wǎng)型柔直系統(tǒng)穩(wěn)定性提升的方法,包括:
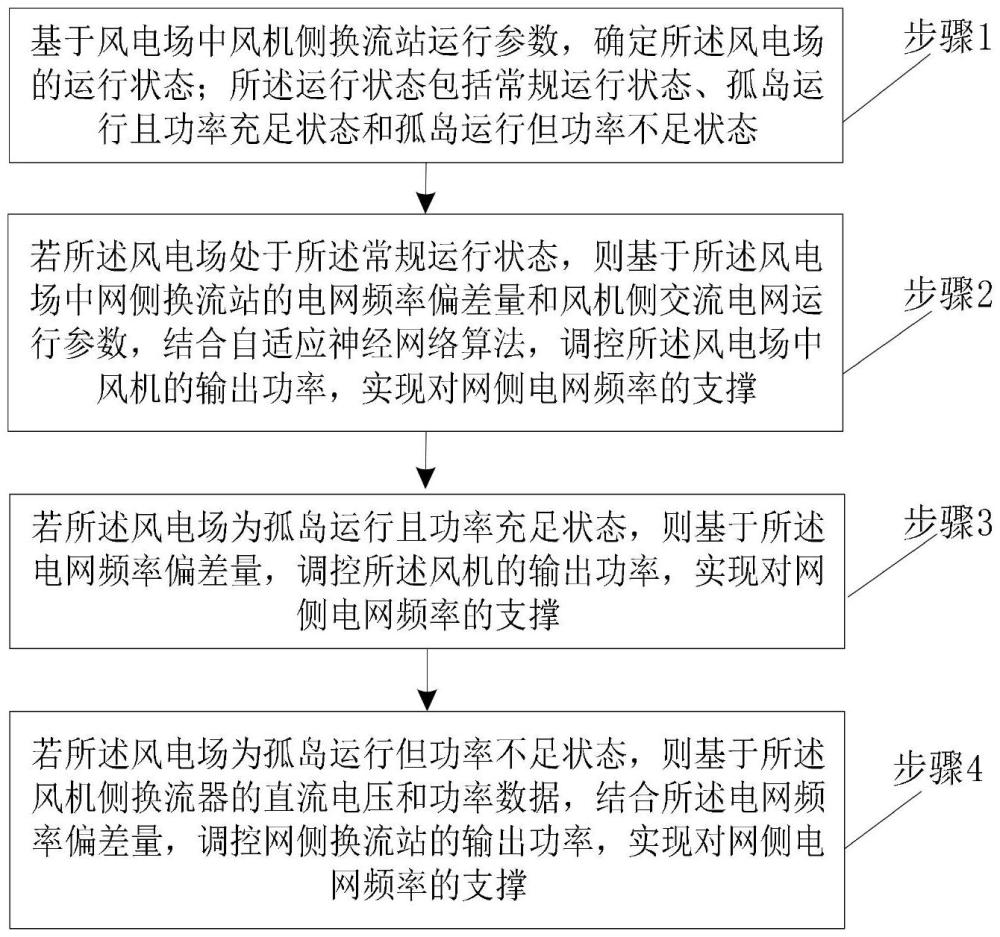
2、基于風(fēng)電場(chǎng)中風(fēng)機(jī)側(cè)換流站運(yùn)行參數(shù),確定所述風(fēng)電場(chǎng)的運(yùn)行狀態(tài);所述運(yùn)行狀態(tài)包括常規(guī)運(yùn)行狀態(tài)、孤島運(yùn)行且功率充足狀態(tài)和孤島運(yùn)行但功率不足狀態(tài);
3、若所述風(fēng)電場(chǎng)處于所述常規(guī)運(yùn)行狀態(tài),則基于所述風(fēng)電場(chǎng)中網(wǎng)側(cè)換流站的電網(wǎng)頻率偏差量和風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),結(jié)合自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,調(diào)控所述風(fēng)電場(chǎng)中風(fēng)機(jī)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐;
4、若所述風(fēng)電場(chǎng)為孤島運(yùn)行且功率充足狀態(tài),則基于所述電網(wǎng)頻率偏差量,調(diào)控所述風(fēng)機(jī)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐;
5、若所述風(fēng)電場(chǎng)為孤島運(yùn)行但功率不足狀態(tài),則基于所述風(fēng)機(jī)側(cè)換流器的直流電壓和功率數(shù)據(jù),結(jié)合所述電網(wǎng)頻率偏差量,調(diào)控網(wǎng)側(cè)換流站的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
6、優(yōu)選的,所述風(fēng)機(jī)側(cè)換流站運(yùn)行參數(shù)包括:風(fēng)機(jī)側(cè)頻率數(shù)據(jù)、直流電壓和功率;所述基于風(fēng)電場(chǎng)中風(fēng)機(jī)側(cè)換流站運(yùn)行參數(shù),確定所述風(fēng)電場(chǎng)的運(yùn)行狀態(tài),包括:
7、基于所述風(fēng)機(jī)側(cè)頻率數(shù)據(jù),計(jì)算風(fēng)機(jī)側(cè)頻率變化量;
8、基于所述風(fēng)機(jī)側(cè)頻率變化量和預(yù)設(shè)閾值,判斷所述風(fēng)機(jī)側(cè)變化量是否小于預(yù)設(shè)閾值;若是,則所述風(fēng)電場(chǎng)處于常規(guī)運(yùn)行狀態(tài);否則,所述風(fēng)電場(chǎng)處于孤島運(yùn)行狀態(tài);
9、當(dāng)所述風(fēng)電場(chǎng)處于孤島運(yùn)行狀態(tài)時(shí),判斷所述風(fēng)機(jī)的功率能否維持柔直系統(tǒng)的直流電壓,當(dāng)維持時(shí),所述風(fēng)電場(chǎng)處于孤島運(yùn)行且功率充足狀態(tài),否則所述風(fēng)電場(chǎng)處于孤島運(yùn)行但功率不足狀態(tài)。
10、優(yōu)選的,所述基于所述風(fēng)電場(chǎng)中網(wǎng)側(cè)換流站的電網(wǎng)頻率偏差量和風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),結(jié)合自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,調(diào)控所述風(fēng)電場(chǎng)中風(fēng)機(jī)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐,包括:
11、基于所述風(fēng)電場(chǎng)中網(wǎng)側(cè)換流站的電網(wǎng)頻率偏差量和風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),采用自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,確定自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量,并將所述自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量發(fā)送至所述風(fēng)電場(chǎng)中的風(fēng)機(jī);
12、將所述電網(wǎng)頻率偏差量輸入預(yù)先構(gòu)建的映射模型,獲取風(fēng)機(jī)輸出功率參考值,并將所述風(fēng)機(jī)輸出功率參考值發(fā)送至所述風(fēng)機(jī),其中,所述映射模型是基于電網(wǎng)頻率偏差量歷史數(shù)據(jù)和對(duì)應(yīng)的風(fēng)機(jī)輸出功率歷史數(shù)據(jù)構(gòu)建的;
13、在所述風(fēng)機(jī)中,基于所述自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量和所述風(fēng)機(jī)輸出功率參考值,調(diào)控風(fēng)機(jī)輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
14、優(yōu)選的,所述基于所述風(fēng)電場(chǎng)中網(wǎng)側(cè)換流站的電網(wǎng)頻率偏差量和風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),采用自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,確定自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量,包括:
15、基于所述風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),通過自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,識(shí)別風(fēng)機(jī)側(cè)交流電網(wǎng)工況,并確定與風(fēng)機(jī)側(cè)交流電網(wǎng)工況對(duì)應(yīng)的自適應(yīng)工況控制系數(shù);
16、在所述網(wǎng)側(cè)換流站中,將所述電網(wǎng)頻率偏差量通過低通濾波,得到濾波后的電網(wǎng)頻率偏差;基于所述濾波后的電網(wǎng)頻率偏差和所述自適應(yīng)工況控制系數(shù),采用頻率電壓變換算法,計(jì)算得到頻率疊加直流電壓值,并將所述疊加直流電壓值發(fā)送至所述風(fēng)機(jī)側(cè)換流站;
17、在所述風(fēng)機(jī)側(cè)換流站中,基于所述頻率疊加直流電壓和所述自適應(yīng)工況控制系數(shù),采用頻率感應(yīng)算法,計(jì)算得到自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量。
18、優(yōu)選的,所述基于所述風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),通過自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,識(shí)別風(fēng)機(jī)側(cè)交流電網(wǎng)工況,并確定與風(fēng)機(jī)側(cè)交流電網(wǎng)工況對(duì)應(yīng)的自適應(yīng)工況控制系數(shù),包括:
19、基于所述風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),通過預(yù)先訓(xùn)練的工況分析神經(jīng)網(wǎng)絡(luò)模型,對(duì)風(fēng)機(jī)側(cè)交流電網(wǎng)工況進(jìn)行識(shí)別,獲取當(dāng)前風(fēng)機(jī)側(cè)交流電網(wǎng)工況,所述風(fēng)機(jī)側(cè)交流電網(wǎng)工況包括:正常工況、欠頻工況、過頻工況和阻抗異常工況;
20、將所述當(dāng)前風(fēng)機(jī)側(cè)交流電網(wǎng)工況和當(dāng)前換流器控制參數(shù),輸入自適應(yīng)參數(shù)生成模型,獲取與風(fēng)機(jī)側(cè)交流電網(wǎng)工況對(duì)應(yīng)的自適應(yīng)工況控制系數(shù),所述自適應(yīng)工況控制系數(shù)包括:自適應(yīng)頻率-直流電壓調(diào)節(jié)系數(shù)和自適應(yīng)直流電壓-頻率調(diào)節(jié)系數(shù)。
21、優(yōu)選的,所述基于所述自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量和所述風(fēng)機(jī)輸出功率參考值,調(diào)控風(fēng)機(jī)輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐,包括:
22、基于所述自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量和當(dāng)前風(fēng)機(jī)輸出功率,根據(jù)構(gòu)網(wǎng)型控制策略算法,計(jì)算得到風(fēng)機(jī)輸出功率值;
23、將所述風(fēng)機(jī)輸出功率值和所述風(fēng)機(jī)輸出功率參考值之差與預(yù)設(shè)閾值進(jìn)行比較,若小于預(yù)設(shè)閾值,則基于所述風(fēng)機(jī)輸出功率值對(duì)風(fēng)機(jī)進(jìn)行調(diào)控;若大于預(yù)設(shè)閾值,則基于所述風(fēng)機(jī)輸出功率參考值對(duì)風(fēng)機(jī)輸出功率進(jìn)行調(diào)控,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
24、優(yōu)選的,所述基于所述風(fēng)機(jī)側(cè)換流器的直流電壓和功率數(shù)據(jù),結(jié)合所述電網(wǎng)頻率偏差量,調(diào)控網(wǎng)側(cè)換流站的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐,包括:
25、在所述風(fēng)機(jī)側(cè)換流站中,基于所述風(fēng)機(jī)的輸出功率、所述風(fēng)機(jī)側(cè)換流器的直流電壓和功率數(shù)據(jù),計(jì)算所述風(fēng)機(jī)側(cè)換流器的功率補(bǔ)償量;基于所述功率補(bǔ)償量和電壓給定值,通過比例積分控制器控制所述風(fēng)機(jī)側(cè)換流器的功率輸出,以維持直流電壓穩(wěn)定;
26、在所述網(wǎng)側(cè)換流站中,基于所述風(fēng)機(jī)側(cè)換流站的功率輸出和所述電網(wǎng)頻率偏差量,采取直流電壓控制策略,通過比例積分控制器對(duì)所述網(wǎng)側(cè)換流器的輸出進(jìn)行調(diào)制,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
27、優(yōu)選的,所述基于所述電網(wǎng)頻率偏差量,調(diào)控所述風(fēng)機(jī)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐,包括:
28、在所述網(wǎng)側(cè)換流站,將所述電網(wǎng)頻率偏差量通過低通濾波,得到濾波后的電網(wǎng)頻率偏差;基于所述濾波后的電網(wǎng)頻率偏差和預(yù)設(shè)直流電壓控制系數(shù),采用頻率電壓變換算法,計(jì)算得到疊加電壓,并將所述疊加電壓發(fā)送至所述風(fēng)機(jī)側(cè)換流站;
29、在所述風(fēng)機(jī)側(cè)換流站中,基于所述疊加電壓值,基于預(yù)設(shè)頻率控制系數(shù),采用頻率感應(yīng)算法,計(jì)算得到風(fēng)機(jī)側(cè)頻率偏差量,并將所述風(fēng)機(jī)側(cè)頻率偏差量發(fā)送至所述風(fēng)機(jī);
30、在所述風(fēng)機(jī)中,基于所述風(fēng)機(jī)側(cè)頻率偏差量調(diào)控所述風(fēng)電場(chǎng)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
31、基于同一發(fā)明構(gòu)思,本發(fā)明還提供一種構(gòu)網(wǎng)型柔直系統(tǒng)穩(wěn)定性提升的系統(tǒng),包括:
32、運(yùn)行狀態(tài)判斷模塊:具體用于基于風(fēng)電場(chǎng)中風(fēng)機(jī)側(cè)換流站運(yùn)行參數(shù),確定所述風(fēng)電場(chǎng)的運(yùn)行狀態(tài);所述運(yùn)行狀態(tài)包括常規(guī)運(yùn)行狀態(tài)、孤島運(yùn)行且功率充足狀態(tài)和孤島運(yùn)行但功率不足狀態(tài);
33、復(fù)合型策略控制模塊:具體用于當(dāng)所述風(fēng)電場(chǎng)處于所述常規(guī)運(yùn)行狀態(tài),則基于所述風(fēng)電場(chǎng)中網(wǎng)側(cè)換流站的電網(wǎng)頻率偏差量和風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),結(jié)合自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,調(diào)控所述風(fēng)電場(chǎng)中風(fēng)機(jī)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐;
34、構(gòu)網(wǎng)型策略控制模塊:具體用于當(dāng)所述風(fēng)電場(chǎng)為孤島運(yùn)行且功率充足狀態(tài),則基于所述電網(wǎng)頻率偏差量,調(diào)控所述風(fēng)機(jī)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐;
35、功率不足策略控制模塊:具體用于當(dāng)所述風(fēng)電場(chǎng)為孤島運(yùn)行但功率不足狀態(tài),則基于所述風(fēng)機(jī)側(cè)換流器的直流電壓和功率數(shù)據(jù),結(jié)合所述電網(wǎng)頻率偏差量,調(diào)控網(wǎng)側(cè)換流站的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
36、優(yōu)選的,所述運(yùn)行狀態(tài)判斷模塊包括:
37、頻率變化計(jì)算單元:用于基于所述風(fēng)機(jī)側(cè)頻率數(shù)據(jù),計(jì)算風(fēng)機(jī)側(cè)頻率變化量;
38、孤島判斷單元:用于基于所述風(fēng)機(jī)側(cè)頻率變化量和預(yù)設(shè)閾值,判斷所述風(fēng)機(jī)側(cè)變化量是否小于預(yù)設(shè)閾值;若是,則所述風(fēng)電場(chǎng)處于常規(guī)運(yùn)行狀態(tài);否則,所述風(fēng)電場(chǎng)處于孤島運(yùn)行狀態(tài);
39、功率判斷單元:用于當(dāng)所述風(fēng)電場(chǎng)處于孤島運(yùn)行狀態(tài)時(shí),判斷所述風(fēng)機(jī)的功率能否維持柔直系統(tǒng)的直流電壓,當(dāng)維持時(shí),所述風(fēng)電場(chǎng)處于孤島運(yùn)行且功率充足狀態(tài),否則所述風(fēng)電場(chǎng)處于孤島運(yùn)行但功率不足狀態(tài)。
40、優(yōu)選的,所述復(fù)合型策略控制模塊包括:
41、自適應(yīng)頻率偏差計(jì)算子模塊:用于基于所述風(fēng)電場(chǎng)中網(wǎng)側(cè)換流站的電網(wǎng)頻率偏差量和風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),采用自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,確定自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量,并將所述自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量發(fā)送至所述風(fēng)電場(chǎng)中的風(fēng)機(jī);
42、功率參考值計(jì)算子模塊:用于將所述電網(wǎng)頻率偏差量輸入預(yù)先構(gòu)建的映射模型,獲取風(fēng)機(jī)輸出功率參考值,并將所述風(fēng)機(jī)輸出功率參考值發(fā)送至所述風(fēng)機(jī),其中,所述映射模型是基于電網(wǎng)頻率偏差量歷史數(shù)據(jù)和對(duì)應(yīng)的風(fēng)機(jī)輸出功率歷史數(shù)據(jù)構(gòu)建的;
43、風(fēng)機(jī)調(diào)控子模塊:用于在所述風(fēng)機(jī)中,基于所述自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量和所述風(fēng)機(jī)輸出功率參考值,調(diào)控風(fēng)機(jī)輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
44、優(yōu)選的,所述自適應(yīng)頻率偏差計(jì)算子模塊包括:
45、自適應(yīng)系數(shù)計(jì)算單元:用于基于所述風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),通過自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,識(shí)別風(fēng)機(jī)側(cè)交流電網(wǎng)工況,并確定與風(fēng)機(jī)側(cè)交流電網(wǎng)工況對(duì)應(yīng)的自適應(yīng)工況控制系數(shù);
46、自適應(yīng)直流電壓計(jì)算單元:用于在所述網(wǎng)側(cè)換流站中,將所述電網(wǎng)頻率偏差量通過低通濾波,得到濾波后的電網(wǎng)頻率偏差;基于所述濾波后的電網(wǎng)頻率偏差和所述自適應(yīng)工況控制系數(shù),采用頻率電壓變換算法,計(jì)算得到頻率疊加直流電壓值,并將所述疊加直流電壓值發(fā)送至所述風(fēng)機(jī)側(cè)換流站;
47、自適應(yīng)頻率計(jì)算單元:用于在所述風(fēng)機(jī)側(cè)換流站中,基于所述頻率疊加直流電壓和所述自適應(yīng)工況控制系數(shù),采用頻率感應(yīng)算法,計(jì)算得到自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量。
48、優(yōu)選的,所述自適應(yīng)系數(shù)計(jì)算單元包括:
49、工況識(shí)別子單元:用于基于所述風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),通過預(yù)先訓(xùn)練的工況分析神經(jīng)網(wǎng)絡(luò)模型,對(duì)風(fēng)機(jī)側(cè)交流電網(wǎng)工況進(jìn)行識(shí)別,獲取當(dāng)前風(fēng)機(jī)側(cè)交流電網(wǎng)工況,所述風(fēng)機(jī)側(cè)交流電網(wǎng)工況包括:正常工況、欠頻工況、過頻工況和阻抗異常工況;
50、自適應(yīng)工況控制系數(shù)計(jì)算子單元:用于將所述當(dāng)前風(fēng)機(jī)側(cè)交流電網(wǎng)工況和當(dāng)前換流器控制參數(shù),輸入自適應(yīng)參數(shù)生成模型,獲取與風(fēng)機(jī)側(cè)交流電網(wǎng)工況對(duì)應(yīng)的自適應(yīng)工況控制系數(shù),所述自適應(yīng)工況控制系數(shù)包括:自適應(yīng)頻率-直流電壓調(diào)節(jié)系數(shù)和自適應(yīng)直流電壓-頻率調(diào)節(jié)系數(shù)。
51、優(yōu)選的,所述風(fēng)機(jī)調(diào)控子模塊包括:
52、輸出功率計(jì)算單元:用于基于所述自適應(yīng)的風(fēng)機(jī)側(cè)頻率偏差量和當(dāng)前風(fēng)機(jī)輸出功率,根據(jù)構(gòu)網(wǎng)型控制策略算法,計(jì)算得到風(fēng)機(jī)輸出功率值;
53、風(fēng)機(jī)調(diào)控單元:用于將所述風(fēng)機(jī)輸出功率值和所述風(fēng)機(jī)輸出功率參考值之差與預(yù)設(shè)閾值進(jìn)行比較,若小于預(yù)設(shè)閾值,則基于所述風(fēng)機(jī)輸出功率值對(duì)風(fēng)機(jī)進(jìn)行調(diào)控;若大于預(yù)設(shè)閾值,則基于所述風(fēng)機(jī)輸出功率參考值對(duì)風(fēng)機(jī)輸出功率進(jìn)行調(diào)控,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
54、優(yōu)選的,所述功率不足策略控制模塊包括:
55、直流電壓控制子模塊:用于在所述風(fēng)機(jī)側(cè)換流站中,基于所述風(fēng)機(jī)的輸出功率、所述風(fēng)機(jī)側(cè)換流器的直流電壓和功率數(shù)據(jù),計(jì)算所述風(fēng)機(jī)側(cè)換流器的功率補(bǔ)償量;基于所述功率補(bǔ)償量和電壓給定值,通過比例積分控制器控制所述風(fēng)機(jī)側(cè)換流器的功率輸出,以維持直流電壓穩(wěn)定;
56、網(wǎng)側(cè)換流器輸出調(diào)制子模塊:在所述網(wǎng)側(cè)換流站中,基于所述風(fēng)機(jī)側(cè)換流站的功率輸出和所述電網(wǎng)頻率偏差量,采取直流電壓控制策略,通過比例積分控制器對(duì)所述網(wǎng)側(cè)換流器的輸出進(jìn)行調(diào)制,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
57、優(yōu)選的,所述構(gòu)網(wǎng)型策略控制模塊包括:
58、網(wǎng)側(cè)電壓計(jì)算子模塊:在所述網(wǎng)側(cè)換流站,將所述電網(wǎng)頻率偏差量通過低通濾波,得到濾波后的電網(wǎng)頻率偏差;基于所述濾波后的電網(wǎng)頻率偏差和預(yù)設(shè)直流電壓控制系數(shù),采用頻率電壓變換算法,計(jì)算得到疊加電壓,并將所述疊加電壓發(fā)送至所述風(fēng)機(jī)側(cè)換流站;
59、風(fēng)機(jī)側(cè)頻率計(jì)算子模塊:在所述風(fēng)機(jī)側(cè)換流站中,基于所述疊加電壓值,基于預(yù)設(shè)頻率控制系數(shù),采用頻率感應(yīng)算法,計(jì)算得到風(fēng)機(jī)側(cè)頻率偏差量,并將所述風(fēng)機(jī)側(cè)頻率偏差量發(fā)送至所述風(fēng)機(jī);
60、風(fēng)機(jī)調(diào)控子模塊:在所述風(fēng)機(jī)中,基于所述風(fēng)機(jī)側(cè)頻率偏差量調(diào)控所述風(fēng)電場(chǎng)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐。
61、基于同一發(fā)明構(gòu)思,本發(fā)明還提供一種電子設(shè)備,包括:至少一個(gè)處理器和存儲(chǔ)器;所述存儲(chǔ)器和處理器通過總線相連;
62、所述存儲(chǔ)器,用于存儲(chǔ)一個(gè)或多個(gè)程序;
63、當(dāng)所述一個(gè)或多個(gè)程序被所述至少一個(gè)處理器執(zhí)行時(shí),實(shí)現(xiàn)如前所述任一項(xiàng)的一種構(gòu)網(wǎng)型柔直系統(tǒng)穩(wěn)定性提升的方法。
64、基于同一發(fā)明構(gòu)思,本發(fā)明還提供一種可讀存儲(chǔ)介質(zhì),其上存有執(zhí)行程序,所述執(zhí)行程序被執(zhí)行時(shí),實(shí)現(xiàn)如前所述任一項(xiàng)的一種構(gòu)網(wǎng)型柔直系統(tǒng)穩(wěn)定性提升的方法。
65、與最接近的現(xiàn)有技術(shù)相比,本發(fā)明具有的有益效果如下:
66、本發(fā)明提供了一種構(gòu)網(wǎng)型柔直系統(tǒng)穩(wěn)定性提升的方法,包括:基于風(fēng)電場(chǎng)中風(fēng)機(jī)側(cè)換流站運(yùn)行參數(shù),確定所述風(fēng)電場(chǎng)的運(yùn)行狀態(tài);所述運(yùn)行狀態(tài)包括常規(guī)運(yùn)行狀態(tài)、孤島運(yùn)行且功率充足狀態(tài)和孤島運(yùn)行但功率不足狀態(tài);若所述風(fēng)電場(chǎng)處于所述常規(guī)運(yùn)行狀態(tài),則基于所述風(fēng)電場(chǎng)中網(wǎng)側(cè)換流站的電網(wǎng)頻率偏差量和風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù),結(jié)合自適應(yīng)神經(jīng)網(wǎng)絡(luò)算法,調(diào)控所述風(fēng)電場(chǎng)中風(fēng)機(jī)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐;若所述風(fēng)電場(chǎng)為孤島運(yùn)行且功率充足狀態(tài),則基于所述電網(wǎng)頻率偏差量,調(diào)控所述風(fēng)機(jī)的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐;若所述風(fēng)電場(chǎng)為孤島運(yùn)行但功率不足狀態(tài),則基于所述風(fēng)機(jī)側(cè)換流器的直流電壓和功率數(shù)據(jù),結(jié)合所述電網(wǎng)頻率偏差量,調(diào)控網(wǎng)側(cè)換流站的輸出功率,實(shí)現(xiàn)對(duì)網(wǎng)側(cè)電網(wǎng)頻率的支撐;本發(fā)明基于與風(fēng)電場(chǎng)并網(wǎng)的風(fēng)機(jī)側(cè)交流電網(wǎng)運(yùn)行參數(shù)和風(fēng)機(jī)運(yùn)行狀態(tài),將風(fēng)電場(chǎng)的運(yùn)行狀態(tài)進(jìn)行劃分,并針對(duì)風(fēng)電場(chǎng)不同的運(yùn)行狀態(tài)采用不同的控制策略,增強(qiáng)了風(fēng)電場(chǎng)控制策略的靈活性、多樣性,進(jìn)一步提升了風(fēng)電場(chǎng)為電網(wǎng)提供頻率支撐時(shí)整體運(yùn)行的穩(wěn)定性。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!