一種共中線開繞組異步電機驅動系統及模型預測控制方法
本發明涉及電力電子與電力傳動的,尤其涉及一種共中線開繞組異步電機驅動系統及模型預測控制方法。
背景技術:
1、近年來,隨著新能源汽車、盾構機等技術的快速發展,異步電機因其成本低、可靠性高等優點而得到廣泛應用。為了提高異步電機驅動系統的運行效率、降低轉矩紋波、提高可靠性,開繞組異步電機驅動系統也得到了廣泛的關注和研究。
2、現有的開繞組異步電機驅動系統可以分為獨立直流母線、共直流母線和共中線的三種拓撲形式。文獻[孫丹,林斌,陳敏,等.hev用開繞組永磁同步電機雙逆變器協同控制[j].電機與控制學報,2016,20(02):29-35.]研究了獨立直流母線供電的開繞組永磁同步電機功率與電壓分配策略,文獻[kasoju?bharath?kumar,and?kunisetti?v.praveenkumar.a?reduced?voltage?vector?strategy-based?ptc?of?oew-pmsm?drives[j].ieeetransactions?on?industrial?electronics,vol.71,no.10,pp.11948-11956,oct.2024]研究了獨立直流母線供電的開繞組永磁同步電機模型預測直接轉矩控制方法。然而,這種獨立直流母線開繞組電機驅動系統沒有零序電流,當電機出現單相繞組開路故障時,這種拓撲難以實現故障容錯運行。文獻[孫丹,趙琛,柯偉煌,等.基于重構電壓矢量的共直流母線型開繞組永磁同步電機改進直接轉矩控制[j].電工技術學報,2022,37(07):1644-1653.]研究了共直流母線型開繞組永磁同步電機的改進直接轉矩控制策略,實現了轉矩脈動抑制。文獻[z.zhang,x.wang,d.xiao,y.zhou,m.he?and?z.wang.a?novel?3-d?spacevector?modulation?strategy?for?open-end?winding?pmsm[j].ieee?transactions?onindustrial?electronics,vol.71,no.8,pp.8536-8547,aug.2024]研究了共直流母線型開繞組永磁同步電機的三維空間矢量調制策略,也顯著降低了轉矩紋波。然而,這種共直流母線開繞組電機驅動系統兩個變換器的直流側連接在一起,始終保持相等,無法獨立調節兩個變換器的直流母線電壓值,降低了系統的靈活性。為了既能實現兩個變換器的直流母線電壓獨立可調,又能通過零序電流實現開繞組電機單相開路故障時的容錯控制,文獻[王順,楊淑英,李一,等.共中線開繞組拓撲三維空間矢量脈寬調制策略研究[j].中國電機工程學報,2023,43(03):1163-1177.]、文獻[李一,王付勝,楊淑英,等.基于浮動橋共中線開繞組拓撲的永磁同步電機矢量控制策略研究[j].中國電機工程學報,2022,42(13):4942-4955.]和文獻[楊淑英,胡曉海,符煥,等.基于共中線拓撲的開繞組異步電機控制策略研究[j].中國電機工程學報,2020,40(11):3681-3691.]研究了一種共中線開繞組電機驅動系統拓撲及其矢量控制策略。然而,這種拓撲的中線由兩個變換器的直流母線電容中性點連接在一起構成,當電機出現單相開路故障需要進行容錯運行時,中線上將流過較大的零序電流,這會增大直流母線電容的電流應力,加速直流母線電容的老化。此外,該拓撲難以實現電機的多模式運行、無法通過多模式運行降低電機損耗。
技術實現思路
1、針對現有共中線開繞組電機驅動系統進行容錯運行時會加速直流母線電容老化、難以實現多模式運行并降低損耗的技術問題,本發明提出一種共中線開繞組異步電機驅動系統及模型預測控制方法,基于兩個三相四橋臂變換器實現開繞組異步電機驅動系統兩個變換器直流電壓可獨立調節、同時又保留中線的目標,共中線開繞組異步電機驅動系統增加了開繞組電機驅動系統的控制自由度,模型預測控制方法大大降低了計算復雜度,實現了電機驅動系統的高性能電流控制,且復雜度低。
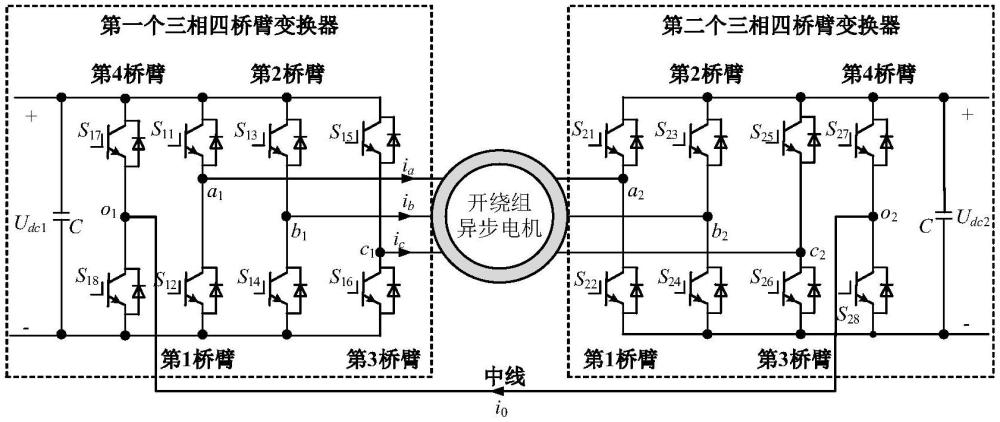
2、為了達到上述目的,本發明的技術方案是這樣實現的:一種共中線開繞組異步電機驅動系統,包括:兩個三相四橋臂變換器和一個開繞組異步電機,兩個三相四橋臂變換器的每個橋臂均由上端功率器件和下端功率器件串聯構成,兩個三相四橋臂變換器的前三個橋臂的上端功率器件和下端功率器件之間作為輸出端分別與開繞組異步電機三相繞組的兩端相連接;兩個三相四橋臂變換器的第四個橋臂的上端功率器件和下端功率器件之間直接連接。
3、優選地,所述上端功率器件和下端功率器件均由全控型電力電子器件和不控型二極管反并聯組成;所述兩個三相四橋臂變換器均包括第一橋臂、第二橋臂、第三橋臂和第四橋臂。
4、所述兩個三相四橋臂變換器的第一橋臂的輸出端分別接到開繞組異步電機定子a相繞組的兩端,兩個三相四橋臂變換器的第二橋臂的輸出端分別接到開繞組異步電機定子b相繞組的兩端,兩個三相四橋臂變換器的第三橋臂的輸出端分別接到開繞組異步電機定子c相繞組的兩端,兩個三相四橋臂變換器的第四橋臂的輸出端直接連接在一起;
5、所述兩個三相四橋臂變換器的4個橋臂的正端各自連在一起并接到各自的直流母線電源的正端,兩個三相四橋臂變換器的4個橋臂的負端各自連在一起,并接到各自的直流母線電源的負端。
6、優選地,所述直流母線電源的正端和負端之間設有電容c,電容c與每個橋臂并聯連接;
7、所述第一個三相四橋臂變換器的第一橋臂的上端功率器件s11和下端功率器件s12串聯連接,上端功率器件s11和下端功率器件s12之間的中點為輸出端;第一個三相四橋臂變換器的第二橋臂的上端功率器件s13和下端功率器件s14串聯連接,上端功率器件s13和下端功率器件s14之間的中點為輸出端;第一個三相四橋臂變換器的第三橋臂的上端功率器件s15和下端功率器件s16串聯連接,上端功率器件s15和下端功率器件s16之間的中點為輸出端;第一個三相四橋臂變換器的第四橋臂的上端功率器件s17和下端功率器件s18串聯連接,上端功率器件s17和下端功率器件s18之間的中點o1為輸出端;所述第二個三相四橋臂變換器的第一橋臂的上端功率器件s21和下端功率器件s22串聯連接,上端功率器件s21和下端功率器件s22之間的中點為輸出端;第二個三相四橋臂變換器的第二橋臂的上端功率器件s23和下端功率器件s24串聯連接,上端功率器件s23和下端功率器件s24的中點為輸出端;第二個三相四橋臂變換器的第三橋臂的上端功率器件s25和下端功率器件s26串聯連接,上端功率器件s25和下端功率器件s26之間的中點為輸出端;第二個三相四橋臂變換器的第四橋臂的上端功率器件s27和下端功率器件s28串聯連接,上端功率器件s27和下端功率器件s28之間的中點o2為輸出端;所述開繞組異步電機的a相定子繞組的兩端a1和a2分別接到第一個三相四橋臂變換器的第一橋臂的輸出端和第二個三相四橋臂變換器的第一橋臂的輸出端;開繞組異步電機b相定子繞組的兩端b1和b2分別接到第一個三相四橋臂變換器的第二橋臂的輸出端和第二個三相四橋臂變換器的第二橋臂的輸出端;開繞組異步電機c相定子繞組的兩端c1和c2分別接到第一個三相四橋臂變換器的第三橋臂的輸出端和第二個三相四橋臂變換器的第三橋臂的輸出端;第一個三相四橋臂變換器的第四橋臂的輸出端o1和第二個三相四橋臂變換器的第四橋臂的輸出端o2直接連在一起;第一個三相四橋臂變換器的4個橋臂正端連接一起并連接到第一直流母線電源的正端,第一個三相四橋臂變換器的4個橋臂負端連接一起并連接到第一直流母線電源的負端;第二個三相四橋臂變換器的4個橋臂正端連接一起并連接到第二直流母線電源的正端,第二個三相四橋臂變換器的4個橋臂負端連接一起并連接到第二直流母線電源的負端。
8、一種共中線開繞組異步電機驅動系統的模型預測控制方法,其步驟如下:
9、步驟s1、定義兩個三相四橋臂變換器的4個橋臂的開關狀態,并根據橋臂上的上下兩個功率器件的導通或關斷狀態確定開關狀態的取值,根據4個橋臂的開關狀態的取值定義16個電壓矢量,分別計算兩個三相四橋臂變換器的16個電壓矢量在αβγ三維靜止坐標系上的電壓值;
10、步驟s2、采樣開繞組異步電機的abc三相定子電流ia、ib、ic,并將定子電流ia、ib、ic換到αβγ三維靜止坐標系上,得到電流iα、iβ、iγ;
11、步驟s3、根據得到的電流iα、iβ和開繞組異步電機的數學模型,計算開繞組異步電機的轉子磁鏈ψrα、ψrβ;
12、步驟s4、根據得到的電流iα、iβ、iγ和開繞組異步電機的轉子磁鏈ψrα、ψrβ,計算αβγ三維靜止坐標系上的電壓參考值uαref、uβref、uγref;
13、步驟s5、根據得到的電壓參考值uαref、uβref和第一個三相四橋臂變換器的8個下標為奇數的電壓矢量對應的αβγ三維靜止坐標系上α軸、β軸上的電壓值,計算得到8個第一代價函數的值;比較8個第一代價函數值的大小,選擇使第一代價函數取最小值的電壓矢量為第一最優電壓矢量;
14、步驟s6、根據得到的電壓參考值uαref、uβref、第一最優電壓矢量對應的α軸、β軸上的電壓值和第二個三相四橋臂變換器的8個下標為奇數的電壓矢量對應的α軸、β軸上的電壓值,計算得到8個第二代價函數的值;比較得到的8個第二代價函數值的大小,選擇使第二代價函數取最小值的第二個三相四橋臂變換器的電壓矢量為第二最優電壓矢量;
15、步驟s7、根據得到的γ軸上的電壓參考值uγref以及第一最優電壓矢量及其相鄰矢量、第二最優矢量及其相鄰矢量所對應的γ軸上的電壓值,計算第三代價函數g3、第四代價函數g4、第五代價函數g5和第六代價函數g6的值;比較第三代價函數g3、第四代價函數g4、第五代價函數g5和第六代價函數g6的值的大小,選擇四個代價函數中取最小值的代價函數所對應的電壓矢量分別作為第一個三相四橋臂變換器和第二個三相四橋臂變換器最終的最優矢量,用于分別控制第一個三相四橋臂變換器和第二個三相四橋臂變換器,從而實現開繞組異步電機的模型預測控制。
16、優選地,所述步驟s1的實現方法為:
17、定義第一個三相四橋臂變換器的第一橋臂對應的開關狀態為sa1,定義第一個三相四橋臂變換器的第二橋臂對應的開關狀態為sb1,定義第一個三相四橋臂變換器的第三橋臂對應的開關狀態為sc1,定義第一個三相四橋臂變換器的第四橋臂對應的開關狀態為s01;
18、當第一個三相四橋臂變換器的第一橋臂的上端功率器件導通、而下端功率器件關斷時,定義開關狀態sa1=1;當第一個三相四橋臂變換器的第一橋臂的上端功率器件關斷、而下端功率器件導通時,定義開關狀態sa1=0;
19、當第一個三相四橋臂變換器的第二橋臂的上端功率器件導通、而下端功率器件關斷時,定義開關狀態sb1=1;當第一個三相四橋臂變換器的第二橋臂的上端功率器件關斷、而下端功率器件導通時,定義開關狀態sb1=0;
20、當第一個三相四橋臂變換器的第三橋臂的上端功率器件導通、而下端功率器件關斷時,定義開關狀態sc1=1;當第一個三相四橋臂變換器的第三橋臂的上端功率器件關斷、而下端功率器件導通時,定義開關狀態sc1=0;
21、當第一個三相四橋臂變換器的第四橋臂的上端功率器件導通、而下端功率器件關斷時,定義開關狀態s01=1;當第一個三相四橋臂變換器的第四橋臂的上端功率器件關斷、而下端功率器件導通時,定義開關狀態s01=0;
22、定義第一個三相四橋臂變換器的16個電壓矢量v1i滿足:
23、當sa1=0,sb1=0,sc1=0,s01=0時,對應的電壓矢量定義為v1_1;
24、當sa1=0,sb1=0,sc1=0,s01=1時,對應的電壓矢量定義為v1_2;
25、當sa1=0,sb1=0,sc1=1,s01=0時,對應的電壓矢量定義為v1_3;
26、當sa1=0,sb1=0,sc1=1,s01=1時,對應的電壓矢量定義為v1_4;
27、當sa1=0,sb1=1,sc1=0,s01=0時,對應的電壓矢量定義為v1_5;
28、當sa1=0,sb1=1,sc1=0,s01=1時,對應的電壓矢量定義為v1_6;
29、當sa1=0,sb1=1,sc1=1,s01=0時,對應的電壓矢量定義為v1_7;
30、當sa1=0,sb1=1,sc1=1,s01=1時,對應的電壓矢量定義為v1_8;
31、當sa1=1,sb1=0,sc1=0,s01=0時,對應的電壓矢量定義為v1_9;
32、當sa1=1,sb1=0,sc1=0,s01=1時,對應的電壓矢量定義為v1_10;
33、當sa1=1,sb1=0,sc1=1,s01=0時,對應的電壓矢量定義為v1_11;
34、當sa1=1,sb1=0,sc1=1,s01=1時,對應的電壓矢量定義為v1_12;
35、當sa1=1,sb1=1,sc1=0,s01=0時,對應的電壓矢量定義為v1_13;
36、當sa1=1,sb1=1,sc1=0,s01=1時,對應的電壓矢量定義為v1_14;
37、當sa1=1,sb1=1,sc1=1,s01=0時,對應的電壓矢量定義為v1_15;
38、當sa1=1,sb1=1,sc1=1,s01=1時,對應的電壓矢量定義為v1_16;其中,i=1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16;
39、定義第二個三相四橋臂變換器的第一橋臂對應的開關狀態為sa2,定義第二個三相四橋臂變換器的第二橋臂對應的開關狀態為sb2,定義第二個三相四橋臂變換器的第三橋臂對應的開關狀態為sc2,定義第二個三相四橋臂變換器的第四橋臂對應的開關狀態為s02;
40、當第二個三相四橋臂變換器的第一橋臂的上端功率器件導通、而下端功率器件關斷時,定義開關狀態sa2=1;當第二個三相四橋臂變換器的第一橋臂的上端功率器件關斷、而下端功率器件導通時,定義開關狀態sa2=0;
41、當第二個三相四橋臂變換器的第二橋臂的上端功率器件導通、而下端功率器件關斷時,定義開關狀態sb2=1;當第二個三相四橋臂變換器的第二橋臂的上端功率器件關斷、而下端功率器件導通時,定義開關狀態sb2=0;
42、當第二個三相四橋臂變換器的第三橋臂的上端功率器件導通、而下端功率器件關斷時,定義開關狀態sc2=1;當第二個三相四橋臂變換器的第三橋臂的上端功率器件關斷、而下端功率器件導通時,定義開關狀態sc2=0;
43、當第二個三相四橋臂變換器的第四橋臂的上端功率器件導通、而下端功率器件關斷時,定義開關狀態s02=1;當第二個三相四橋臂變換器的第四臂的上端功率器件關斷、而下端功率器件導通時,定義開關狀態s02=0;
44、定義第二個三相四橋臂變換器的16個電壓矢量v2_i滿足:
45、當sa2=0,sb2=0,sc2=0,s02=0時,對應的電壓矢量定義為v2_1;
46、當sa2=0,sb2=0,sc2=0,s02=1時,對應的電壓矢量定義為v2_2;
47、當sa2=0,sb2=0,sc2=1,s02=0時,對應的電壓矢量定義為v2_3;
48、當sa2=0,sb2=0,sc2=1,s02=1時,對應的電壓矢量定義為v2_4;
49、當sa2=0,sb2=1,sc2=0,s02=0時,對應的電壓矢量定義為v2_5;
50、當sa2=0,sb2=1,sc2=0,s02=1時,對應的電壓矢量定義為v2_6;
51、當sa2=0,sb2=1,sc2=1,s02=0時,對應的電壓矢量定義為v2_7;
52、當sa2=0,sb2=1,sc2=1,s02=1時,對應的電壓矢量定義為v2_8;
53、當sa2=1,sb2=0,sc2=0,s02=0時,對應的電壓矢量定義為v2_9;
54、當sa2=1,sb2=0,sc2=0,s02=1時,對應的電壓矢量定義為v2_10;
55、當sa2=1,sb2=0,sc2=1,s02=0時,對應的電壓矢量定義為v2_11;
56、當sa2=1,sb2=0,sc2=1,s02=1時,對應的電壓矢量定義為v2_12;
57、當sa2=1,sb2=1,sc2=0,s02=0時,對應的電壓矢量定義為v2_13;
58、當sa2=1,sb2=1,sc2=0,s02=1時,對應的電壓矢量定義為v2_14;
59、當sa2=1,sb2=1,sc2=1,s02=0時,對應的電壓矢量定義為v2_15;
60、當sa2=1,sb2=1,sc2=1,s02=1時,對應的電壓矢量定義為v2_16。
61、優選地,根據定義的第一個三相四橋臂變換器的16個電壓矢量v1_i對應的開關狀態sa1、sb1、sc1和s01的值,計算16個電壓矢量v1_i在αβγ三維靜止坐標系上的電壓值uα1_i、uβ1_i、uγ1_i為:
62、
63、其中,udc1表示第一個三相四橋臂變換器的直流母線電壓,sa1_i、sb1_i、sc1_i和s01_i分別表示第i個電壓矢量v1_i所對應的開關狀態sa1、sb1、sc1和s01的取值,uα1_i表示第i個電壓矢量v1_i在α軸上的電壓值,uβ1_i表示第i個電壓矢量v1_i在β軸上的電壓值,uγ1_i表示第i個電壓矢量v1_i在γ軸上的電壓值;其中,i=1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16;
64、根據定義的第二個三相四橋臂變換器的16個電壓矢量v2_i對應的開關狀態值sa2、sb2、sc2和s02,計算16個電壓矢量v2_i在αβγ三維靜止坐標系上的電壓值uα2_i、uβ2_i、uγ2_i為:
65、
66、其中,udc2表示第二個三相四橋臂變換器的直流母線電壓,sa2_i、sb2_i、sc2_i和s02_i分別表示第i個電壓矢量v2_i所對應的開關狀態sa2、sb2、sc2和s02的值,uα2_i表示第i個電壓矢量v2_i在α軸上的電壓值,uβ2_i表示第i個電壓矢量v2_i在β軸上的電壓值,uγ2_i表示第i個電壓矢量v2_i在γ軸上的電壓值。
67、優選地,所述步驟s2中電流iα、iβ、iγ的計算方法為:
68、
69、其中,ia表示開繞組異步電機的a相定子電流,ib表示開繞組異步電機的b相定子電流,ic表示開繞組異步電機的c相定子電流,iα表示開繞組異步電機的abc三相定子電流在α軸上的分量,iβ表示開繞組異步電機的abc三相定子電流在β軸上的分量,iγ表示開繞組異步電機的abc三相定子電流在γ軸上的分量;
70、所述開繞組異步電機的轉子磁鏈ψrα、ψrβ為:
71、
72、其中,ψrα為開繞組異步電機的轉子磁鏈在α軸上的分量,ψrβ為開繞組異步電機的轉子磁鏈在β軸上的分量,lm表示開繞組異步電機的互感,tr是轉子時間常數,滿足tr=lr/rr,lr表示開繞組異步電機的轉子電感,rr表示開繞組異步電機的轉子電阻,ωr表示開繞組異步電機的轉子角速度,s表示拉普拉斯算子,j表示超前90度;
73、所述αβγ三維靜止坐標系上的電壓參考值uαref、uβref、uγref為:
74、
75、其中,uαref表示α軸上的電壓參考值,uβref表示β軸上的電壓參考值,uγref表示γ軸上的電壓參考值,iαref表示在α軸上的開繞組異步電機的定子電流參考值,iβref表示在β軸上的開繞組異步電機的定子電流參考值,iγref表示在γ軸上的開繞組異步電機的定子電流參考值,ts表示控制周期,a、b、c、d為4個系數。
76、優選地,所述8個第一代價函數g1k的值的計算方法為:
77、g1k=|uαref-uα1_(2*k-1)|+|uβref-uβ1_(2*k-1)|
78、其中,k=1,2,3,4,5,6,7,8,uα1_(2*k-1)和uβ1_(2*k-1)分別表示第一個三相四橋臂變換器的8個下標為奇數的電壓矢量v1_(2*k-1)對應的α軸上的電壓值、β軸上的電壓值;
79、所述8個第二代價函數g2k的值計算方法為:
80、g2k=|uαref-(uα1_(2*m-1)-uα2_(2*k-1))|+|uβref-(uβ1_(2*m-1)-uβ2_(2*k-1))|
81、其中,uα1_(2*m-1)和uβ1_(2*m-1)分別為第一最優電壓矢量v1_(2*m-1)對應的α軸、β軸上的電壓值,uα2_(2*k-1)和uβ2_(2*k-1)分別為第二個三相四橋臂變換器的8個下標為奇數的電壓矢量v2_(2*k-1)對應的α軸、β軸上的電壓值;
82、所述計算第三代價函數g3、第四代價函數g4、第五代價函數g5和第六代價函數g6的值的方法分別為:
83、g3=|uγref-(uγ1_(2*m-1)-uγ2_(2*n-1))|
84、g4=|uγref-(uγ1_2*m-uγ2_(2*n-1))|
85、g5=|uγref-(uγ1_(2*m-1)-uγ2_2*n)|
86、g6=|uγref-(uγ1_2*m-uγ2_2*n)|
87、其中,uγ1_(2*m-1)、uγ1_2*m、uγ2_(2*n-1)、uγ2_2*n分別為第一最優矢量v1_(2*m-1)及其相鄰矢量v1_2*m、第二最優矢量v2_(2*n-1)及其相鄰矢量v2_2*n所對應的γ軸上的電壓值。
88、優選地,選擇使第一代價函數g1k取最小值的電壓矢量v1_(2*k-1)為最優電壓矢量,記為第一最優電壓矢量v1_(2*m-1),其中,(2*m-1)表示使第一代價函數g1k取最小值的電壓矢量的下標,m為1,2,3,4,5,6,7,8之中的某一個值;
89、比較8個第二代價函數g2k值的大小,選擇使第二代價函數g2k取最小值的電壓矢量v2_(2*k-1)為最優電壓矢量,記為第二最優電壓矢量v2_(2*n-1),其中,(2*n-1)表示使第二代價函數g2k取最小值的電壓矢量的下標,n為1,2,3,4,5,6,7,8之中的某一個值;
90、選擇第三代價函數g3、第四代價函數g4、第五代價函數g5和第六代價函數g6中取最小值的代價函數所對應的電壓矢量v1_p和v2_q分別作為第一個三相四橋臂變換器和第二個三相四橋臂變換器最終的最優矢量進行輸出,其中,p表示(2*m-1)和2*m中的一個值,q表示(2*n-1)和2*n中的一個值,m和n均為1,2,3,4,5,6,7,8之中的某一個值。
91、優選地,所述系數σ表示漏磁系數,且滿足ls表示開繞組異步電機的定子電感,rs表示開繞組異步電機的定子電阻,l1s表示開繞組異步電機的定子漏感;
92、所述定子電流參考值iαref、iβref、iγref的計算方法為:
93、
94、其中,idref為開繞組異步電機的勵磁電流參考值,iqref為開繞組異步電機的轉矩電流參考值,i0ref為開繞組異步電機的零序電流參考值,θr為開繞組異步電機轉子磁場的角度。
95、與現有技術相比,本發明的有益效果:本發明所提共中線開繞組異步電機驅動系統既可以實現兩個變換器直流電壓獨立調節,又可以利用兩個變換器的第4個橋臂構造中線,實現零序電流靈活可調,減小了直流母線電容的電流應力,增強了共中線開繞組異步電機驅動系統的控制靈活性,可以實現多模式運行以降低系統損耗。同時,本發明所提低復雜度模型預測控制方法采用先選擇第一個三相四橋臂變換器輸出的第一最優矢量、再選擇第二個三相四橋臂變換器輸出的第二最優矢量、最后再優化零序分量的方法以確定最終的最優矢量的分層迭代原理,可將最優矢量在線尋優次數由256次降低為20次,顯著降低了計算復雜度。
- 還沒有人留言評論。精彩留言會獲得點贊!