用于減少雜散光反射的系統和方法與流程
背景技術:
技術實現思路
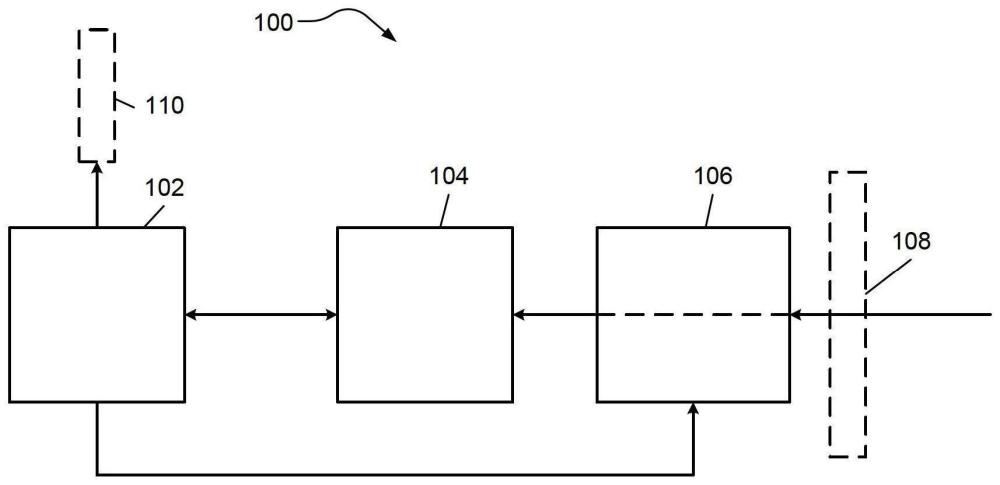
1、一種載具系統,包括位于載具內的相機模塊、定位在相機模塊的視場中的線性偏振器模塊、以及與相機模塊和線性偏振器模塊通信的控制模塊。相機模塊被配置成獲取描繪了載具外部景物(scenery)的圖像幀,并且將所述圖像幀傳輸到載具的感知管線。控制模塊被配置成從相機模塊接收圖像幀,分析所述圖像幀以標識是否存在反射,以及響應于標識出所述圖像幀中的反射,選擇性地激活線性偏振器模塊以從由相機模塊捕獲的后續圖像幀中移除反射。
2、在其他特征中,控制模塊被配置成針對一個或多個靜態像素來掃描所述圖像幀,以標識是否存在反射。
3、在其他特征中,控制模塊被配置成基于所述圖像幀的位片分析(bit?sliceanalysis)來驗證所述一個或多個靜態像素與反射相關聯。
4、在其他特征中,控制模塊被配置成修改相機模塊的對比度值和亮度值,以增加由相機模塊經由激活的線性偏振器模塊捕獲的所述后續圖像幀的質量。
5、在其他特征中,控制模塊被配置成:獲得具有反射的接收到的圖像幀的對比度值和亮度值,以及基于接收到的圖像幀的對比度值和亮度值來修改相機模塊的對比度值和亮度值。
6、在其他特征中,控制模塊被配置成停用線性偏振器模塊。
7、在其他特征中,控制模塊被配置成響應于在激活線性偏振器模塊之后由相機模塊捕獲的所定義數量的連續圖像幀而停用線性偏振器模塊。
8、在其他特征中,所定義數量的連續圖像幀是六十個連續圖像幀。
9、在其他特征中,所述系統進一步包括被定位成與相機模塊鄰近的擋風玻璃(windshield)。所述擋風玻璃包括表面以及施加到所述表面的涂層。
10、在其他特征中,相機模塊被配置成經由所述擋風玻璃來獲取描繪了載具外部景物的圖像幀。
11、在其他特征中,所述涂層被配置成減少由于反射引起的所述圖像幀的強度損失。
12、一種從位于載具內的相機模塊所捕獲的圖像幀中移除反射的方法,包括:從相機模塊接收圖像幀,分析所述圖像幀以標識是否存在反射,響應于標識出所述圖像幀中的反射,選擇性地激活定位在相機模塊的視場中的線性偏振器模塊,以從由相機模塊捕獲的后續圖像幀中移除反射,以及將所述后續圖像幀傳輸到載具的感知管線,以便在載具的控制中使用。
13、在其他特征中,分析所述圖像幀包括針對一個或多個靜態像素來掃描所述圖像幀,以標識是否存在反射。
14、在其他特征中,分析所述圖像幀包括基于所述圖像幀的位片分析來驗證所述一個或多個靜態像素與反射相關聯。
15、在其他特征中,所述方法進一步包括修改相機模塊的對比度值和亮度值,以增加由相機模塊經由激活的線性偏振器模塊捕獲的所述后續圖像幀的質量。
16、在其他特征中,所述方法進一步包括獲得具有反射的圖像幀的對比度值和亮度值。
17、在其他特征中,修改相機模塊的對比度值和亮度值包括基于所獲得的對比度值和亮度值來修改相機模塊的對比度值和亮度值。
18、在其他特征中,所述方法進一步包括停用線性偏振器模塊。
19、在其他特征中,停用線性偏振器模塊包括響應于在激活線性偏振器模塊之后由相機模塊捕獲的所定義數量的連續圖像幀而停用線性偏振器模塊。
20、在其他特征中,所定義數量的連續圖像幀是六十個連續圖像幀。
21、一種載具系統,包括位于載具內的相機模塊、定位在相機模塊的視場中的線性偏振器模塊、以及與相機模塊和線性偏振器模塊通信的控制模塊。相機模塊被配置成獲取描繪了載具外部景物的圖像幀,并且將所述圖像幀傳輸到載具的感知管線。控制模塊被配置成從相機模塊接收第一圖像幀,選擇性地激活線性偏振器模塊并且從相機模塊接收第二圖像幀,分析第一圖像幀和第二圖像幀以標識第一圖像幀中是否存在反射,以及響應于標識出反射,從第一圖像幀中移除反射。
22、在其他特征中,控制模塊被配置成通過修改第一圖像幀中的像素來從第一圖像幀中移除反射。
23、在其他特征中,所述系統進一步包括被定位成與相機模塊鄰近的擋風玻璃。所述擋風玻璃包括表面以及施加到所述表面的涂層。
24、在其他特征中,相機模塊被配置成經由所述擋風玻璃來獲取描繪了載具外部景物的圖像幀。
25、在其他特征中,所述涂層被配置成減少由于反射所致的所述圖像幀的強度損失。
26、本公開提供了以下實施例:
27、1.一種用于載具的系統,所述系統包括:
28、位于載具內的相機模塊,相機模塊被配置成獲取描繪了載具外部景物的圖像幀,并且將所述圖像幀傳輸到載具的感知管線;
29、定位在相機模塊的視場中的線性偏振器模塊;以及
30、與相機模塊和線性偏振器模塊通信的控制模塊,控制模塊被配置成:
31、從相機模塊接收圖像幀;
32、分析所述圖像幀以標識是否存在反射;以及
33、響應于標識出所述圖像幀中的反射,選擇性地激活線性偏振器模塊以從由相機模塊捕獲的后續圖像幀中移除反射。
34、2.根據實施例1所述的系統,其中控制模塊被配置成針對一個或多個靜態像素來掃描所述圖像幀,以標識是否存在反射。
35、3.根據實施例2所述的系統,其中控制模塊被配置成基于所述圖像幀的位片分析來驗證所述一個或多個靜態像素與反射相關聯。
36、4.根據實施例2所述的系統,其中控制模塊被配置成修改相機模塊的對比度值和亮度值,以增加由相機模塊經由激活的線性偏振器模塊捕獲的所述后續圖像幀的質量。
37、5.根據實施例4所述的系統,其中控制模塊被配置成:
38、獲得具有反射的接收到的圖像幀的對比度值和亮度值;以及
39、基于接收到的圖像幀的對比度值和亮度值來修改相機模塊的對比度值和亮度值。
40、6.根據實施例1所述的系統,其中控制模塊被配置成停用線性偏振器模塊。
41、7.根據實施例6所述的系統,其中控制模塊被配置成響應于在激活線性偏振器模塊之后由相機模塊捕獲的所定義數量的連續圖像幀而停用線性偏振器模塊。
42、8.根據實施例7所述的系統,其中所定義數量的連續圖像幀是六十個連續圖像幀。
43、9.根據實施例1所述的系統,進一步包括被定位成與相機模塊鄰近的擋風玻璃,所述擋風玻璃包括表面以及施加到所述表面的涂層,其中:
44、相機模塊被配置成經由所述擋風玻璃來獲取描繪了載具外部景物的圖像幀;以及
45、所述涂層被配置成減少由于反射所致的所述圖像幀的強度損失。
46、10.一種從位于載具內的相機模塊所捕獲的圖像幀中移除反射的方法,所述方法包括:
47、從相機模塊接收圖像幀;
48、分析所述圖像幀以標識是否存在反射;
49、響應于標識出所述圖像幀中的反射,選擇性地激活定位在相機模塊的視場中的線性偏振器模塊,以從由相機模塊捕獲的后續圖像幀中移除反射;以及
50、將所述后續圖像幀傳輸到載具的感知管線,以便在載具的控制中使用。
51、11.根據實施例10所述的方法,其中分析所述圖像幀包括針對一個或多個靜態像素來掃描所述圖像幀,以標識是否存在反射。
52、12.根據實施例11所述的方法,其中分析所述圖像幀包括基于所述圖像幀的位片分析來驗證所述一個或多個靜態像素與反射相關聯。
53、13.根據實施例10所述的方法,進一步包括修改相機模塊的對比度值和亮度值,以增加由相機模塊經由激活的線性偏振器模塊捕獲的所述后續圖像幀的質量。
54、14.根據實施例13所述的方法,進一步包括獲得具有反射的圖像幀的對比度值和亮度值,其中修改相機模塊的對比度值和亮度值包括基于所獲得的對比度值和亮度值來修改相機模塊的對比度值和亮度值。
55、15.根據實施例10所述的方法,進一步包括停用線性偏振器模塊。
56、16.根據實施例15所述的方法,其中停用線性偏振器模塊包括響應于在激活線性偏振器模塊之后由相機模塊捕獲的所定義數量的連續圖像幀而停用線性偏振器模塊。
57、17.根據實施例16所述的方法,其中所定義數量的連續圖像幀是六十個連續圖像幀。
58、18.一種用于載具的系統,所述系統包括:
59、位于載具內的相機模塊,相機模塊被配置成獲取描繪了載具外部景物的圖像幀,并且將所述圖像幀傳輸到載具的感知管線;
60、定位在相機模塊的視場中的線性偏振器模塊;以及
61、與相機模塊和線性偏振器模塊通信的控制模塊,控制模塊被配置成:
62、從相機模塊接收第一圖像幀;
63、選擇性地激活線性偏振器模塊并且從相機模塊接收第二圖像幀;
64、分析第一圖像幀和第二圖像幀,以標識第一圖像幀中是否存在反射;以及
65、響應于標識出反射,從第一圖像幀中移除反射。
66、19.根據實施例18所述的系統,其中控制模塊被配置成通過修改第一圖像幀中的像素來從第一圖像幀中移除反射。
67、20.根據實施例18所述的系統,進一步包括被定位成與相機模塊鄰近的擋風玻璃,所述擋風玻璃包括表面以及施加到所述表面的涂層,其中:
68、相機模塊被配置成經由所述擋風玻璃來獲取描繪了載具外部景物的圖像幀;以及
69、所述涂層被配置成減少由于反射所致的所述圖像幀的強度損失。
70、本公開的進一步的適用性領域將從詳細描述、權利要求和附圖變得明顯。該詳細描述和具體示例僅意圖出于說明目的,而不是意圖限制本公開的范圍。
- 還沒有人留言評論。精彩留言會獲得點贊!