一種基于殘差網(wǎng)絡(luò)的通感一體化波形超分辨率感知方法
本發(fā)明屬于無(wú)線通信,具體涉及到一種通信感知一體化場(chǎng)景下正交頻分復(fù)用系統(tǒng)接收端的多普勒與時(shí)延估計(jì)方法。
背景技術(shù):
1、通信感知一體化技術(shù)(integrated?sensing?and?communication,isac)是第六代移動(dòng)通信技術(shù)(6th?generation?mobile?networks,6g)的六大應(yīng)用場(chǎng)景之一,也是實(shí)現(xiàn)物理世界和數(shù)字世界深入融合的關(guān)鍵技術(shù)。6g對(duì)兼具通信與感知功能的智能系統(tǒng)需求日益迫切。在這一背景下,通信感知一體化成為推動(dòng)通信與感知功能集成與協(xié)同、提升系統(tǒng)頻譜利用效率的關(guān)鍵使能技術(shù),吸引了學(xué)術(shù)界的巨大興趣和廣泛關(guān)注。在6g中,一體化波形設(shè)計(jì)是isac設(shè)計(jì)的核心技術(shù),在現(xiàn)有ofdm(orthogonal?frequency?division?multiplexing,ofdm)移動(dòng)通信系統(tǒng)的制式上增加感知功能,不對(duì)蜂窩系統(tǒng)進(jìn)行大幅修改,是較為直接且成本較低的一種方式。使用ofdm波形的系統(tǒng)具有高分辨率和較強(qiáng)的抗多徑衰落能力,表現(xiàn)出優(yōu)秀的性能。為了實(shí)現(xiàn)并優(yōu)化ofdm系統(tǒng)的感知性能,許多傳統(tǒng)的雷達(dá)感知算法被嘗試應(yīng)用到ofdm系統(tǒng)中。傳統(tǒng)ofdm速度-距離聯(lián)合感知算法最早可追溯到2d-dft,以及同樣用于ofdm系統(tǒng)的超分辨率算法music、capon等。但傳統(tǒng)的超分辨率算法可以達(dá)到的精度受到ofdm信號(hào)時(shí)寬和帶寬的限制。在多目標(biāo)場(chǎng)景中,當(dāng)兩個(gè)目標(biāo)的距離差或速度差小于感知分辨率時(shí),兩個(gè)目標(biāo)在感知譜上對(duì)應(yīng)的感知譜峰會(huì)互相干擾。隨著感知參數(shù)逐漸接近,兩個(gè)譜峰會(huì)逐漸合并,直至傳統(tǒng)的“超分辨率”算法也無(wú)法將其分離。
2、近年來(lái),越來(lái)越多的研究將目光聚焦于機(jī)器學(xué)習(xí)方法在超分辨率估計(jì)工作上的應(yīng)用。傳統(tǒng)的多層感知機(jī)被嘗試應(yīng)用在單快照的到達(dá)角估計(jì)上,實(shí)現(xiàn)了對(duì)多個(gè)目標(biāo)的低復(fù)雜度估計(jì)。在自動(dòng)駕駛領(lǐng)域中對(duì)汽車的二維到達(dá)角估計(jì)問(wèn)題被證明可以表述為塊稀疏恢復(fù)問(wèn)題,并通過(guò)一種稀疏貝葉斯學(xué)習(xí)網(wǎng)絡(luò)解決該問(wèn)題,實(shí)現(xiàn)對(duì)感知參數(shù)的估計(jì)。大規(guī)模多輸入多輸出系統(tǒng)中的信道估計(jì)問(wèn)題也可以通過(guò)引入深度學(xué)習(xí)網(wǎng)絡(luò)在一定程度上得到解決。雖然這些研究展示了機(jī)器學(xué)習(xí)方法在到達(dá)角估計(jì)問(wèn)題上的潛力,也可以應(yīng)用到ofdm感知估計(jì)中,但他們的性能與復(fù)雜度難以得到兼顧。因此,一種在性能與復(fù)雜度中取得有效折衷的感知估計(jì)方法尚待發(fā)掘。
技術(shù)實(shí)現(xiàn)思路
1、針對(duì)現(xiàn)有技術(shù)存在的問(wèn)題,本發(fā)明提出了一種基于殘差網(wǎng)絡(luò)的通感一體化波形超分辨率感知方法。
2、所述基于殘差網(wǎng)絡(luò)的通感一體化波形超分辨率感知方法包括:
3、步驟1:網(wǎng)絡(luò)模型構(gòu)建
4、步驟1.1:第一層神經(jīng)網(wǎng)絡(luò)由普通的卷積層和池化層構(gòu)成,卷積層的卷積核大小為3×3,步長(zhǎng)(stride)為1,輸出通道數(shù)為64,在卷積層后面添加一層批歸一化層,并使用relu函數(shù)作為批歸一化層的輸出函數(shù),最大池化層被放置在relu層后,核大小為3×3,步長(zhǎng)為2;
5、步驟1.2:第二層和第三層神經(jīng)網(wǎng)絡(luò)分別由一個(gè)經(jīng)典的殘差塊構(gòu)成,每個(gè)殘差塊內(nèi)部包含兩層卷積層,每個(gè)卷積層的卷積核大小設(shè)置為3×3,步長(zhǎng)為1,第二層殘差塊的輸出通道為64,第三層殘差塊的輸出通道為128;
6、步驟1.3:第四層和第五層神經(jīng)網(wǎng)絡(luò)則在殘差塊的基礎(chǔ)上添加了注意力機(jī)制,第四、第五層殘差塊的內(nèi)部參數(shù)設(shè)置與前兩層一樣,輸出通道數(shù)量分別設(shè)置為256和512,殘差塊后面被加入了一層senet(squeeze-and-excitation?net),降維比例分別設(shè)置為8和16;
7、步驟1.4:第五層后面通過(guò)一層全局平均池化層對(duì)數(shù)據(jù)進(jìn)行降維,隨后接上一個(gè)全連接層作為輸出層,輸出神經(jīng)元的數(shù)量設(shè)置為其中為感知目標(biāo)的數(shù)量;
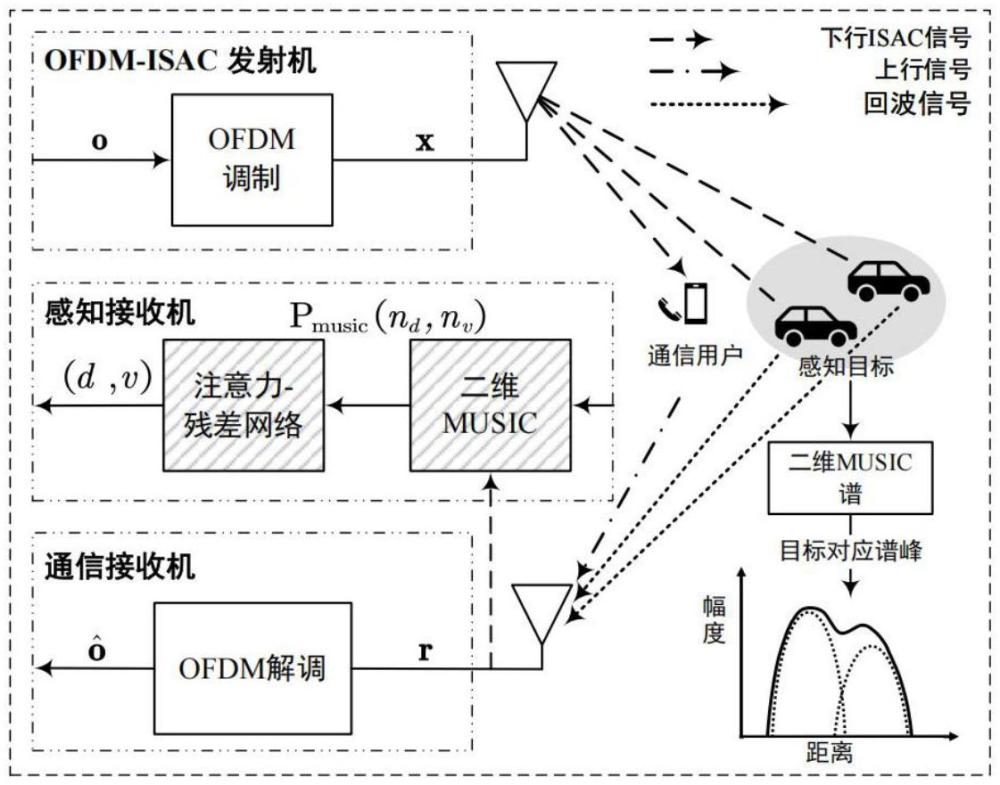
8、步驟2:信號(hào)處理流程
9、步驟2.1:設(shè)置參數(shù)n、m和其中:n為ofdm符號(hào)數(shù),m為子載波數(shù),為調(diào)制階數(shù),信源根據(jù)待傳輸?shù)膬?nèi)容生成長(zhǎng)度為的串行比特?cái)?shù)據(jù)流,并對(duì)該數(shù)據(jù)流進(jìn)行階數(shù)字調(diào)制映射為mn個(gè)星座符號(hào),其中:m=0,...,m-1,n=0,...,n-1;
10、步驟2.2:對(duì)mn個(gè)星座符號(hào)首先通過(guò)串并變換將其擺放在時(shí)間-頻率域網(wǎng)格上,得到時(shí)頻域的待發(fā)送符號(hào),記為a[m,n],發(fā)射端對(duì)a[m,n]的每一行進(jìn)行m點(diǎn)離散逆傅里葉變換(inverse?discrete?fourier?transform,idft)得到離散時(shí)域樣本,再通過(guò)發(fā)射脈沖成型函數(shù)將其轉(zhuǎn)化為連續(xù)的時(shí)域待發(fā)射信號(hào)x(t),如下式(1):
11、
12、式1中,δf為子載波間隔,ts為一個(gè)帶循環(huán)前綴(cyclic?prefix,cp)ofdm符號(hào)的持續(xù)時(shí)間,滿足ts=t+tcp,且t=1/δf為ofdm符號(hào)信息部分的持續(xù)時(shí)間,tcp為cp部分的持續(xù)時(shí)間,gtx(t)為發(fā)射脈沖成型函數(shù);
13、步驟2.3:設(shè)置感知參數(shù)ρk,dk和vk,其中為感知目標(biāo)的數(shù)量,ρk,dk和vk分別為第k個(gè)目標(biāo)對(duì)應(yīng)的信道增益,距離和速度,且有
14、步驟2.4:根據(jù)感知參數(shù)構(gòu)建時(shí)間-時(shí)延域信道沖激響應(yīng)其中δ(·)為狄拉克德?tīng)査瘮?shù),τk和vk分別為第k條徑對(duì)應(yīng)的時(shí)延和多普勒,滿足τk=2dk/c和vk=2vkfc/c,c表示光速,fc表示發(fā)射信號(hào)的中心載頻;
15、步驟2.5:發(fā)射的信號(hào)通過(guò)感知信道到達(dá)感知接收端,接收信號(hào)r(t)通過(guò)發(fā)送信號(hào)x(t)與時(shí)間-時(shí)延域信道沖激響應(yīng)h(t,τ)的積分得到,如下式(2):
16、
17、式(2)中,n(t)為接收機(jī)接收到的加性高斯白噪聲,接收端通過(guò)對(duì)接收信號(hào)以時(shí)間間隔t/m進(jìn)行采樣可以得到離散形式的接收信號(hào),除去采樣數(shù)據(jù)中屬于循環(huán)前綴的部分,并對(duì)每m個(gè)采樣點(diǎn)進(jìn)行dft,即得到時(shí)頻域的接收信號(hào)矩陣y[m,n]:如下式(3)
18、
19、時(shí)頻域接收矩陣看作是發(fā)送符號(hào)a[m,n]乘以信道復(fù)增益再加上噪聲的結(jié)果,則有y=a⊙h(d,v)+n,其中⊙表示哈達(dá)瑪積,h(d,v)為時(shí)間-頻率域的信道沖激響應(yīng)矩陣,和表示待估計(jì)的感知參數(shù)向量,令表示信道增益向量,則h(d,v)進(jìn)一步被拆解為h(d,v)=u(d)diag(γ)b(v)t,其中u(d)和b(v)分別表示由時(shí)延和多普勒對(duì)應(yīng)的相移矩陣,如下式(4):
20、
21、式(4)中,步驟2.6:估計(jì)算法需要接收信號(hào)矩陣中與信道相關(guān)的信息,需要將接收矩陣y以元素級(jí)除法除以發(fā)送符號(hào)a得到待估計(jì)矩陣o:
22、
23、上式(5)中,待估計(jì)矩陣o的行方向包含著每個(gè)目標(biāo)的距離信息,列方向包含著每個(gè)目標(biāo)的速度信息,表示噪聲矩陣;
24、步驟2.7:將o重新排列,令列向量逐一拼接到一起,將距離信息和速度信息擺放在同一個(gè)維度上,定義轉(zhuǎn)向矢量其中:表示克羅內(nèi)克積,則重新排列后的o用如下式(6)表示:
25、
26、式(6)中,表示重新排列后的向量,vec(·)表示列向量化操作;
27、步驟2.8:將q與其共軛轉(zhuǎn)置qh相乘,計(jì)算協(xié)方差矩陣qxx=qqh;
28、步驟2.9:計(jì)算協(xié)方差矩陣qxx的特征值和對(duì)應(yīng)的特征向量,得到qxx的特征值分解qxx=eλeh,其中:λ=diag(λ1,...,λmn),e=[e1,...,emn],λl和el分別是協(xié)方差矩陣qxx的特征值和對(duì)應(yīng)的特征向量;
29、步驟2.10:將計(jì)算得到的特征值進(jìn)行降序排序,使得排序后的特征值序列滿足其中特征向量也同時(shí)按照特征值的順序進(jìn)行重新排列,重新排列后的特征向量矩陣記為
30、步驟2.11:最大的前個(gè)特征值被認(rèn)為是個(gè)目標(biāo)的反射信號(hào)對(duì)應(yīng)的特征值,其余的個(gè)特征值則認(rèn)為是噪聲特征值,根據(jù)協(xié)方差矩陣qxx的特征值分解和排序結(jié)果,接收信號(hào)被分解為信號(hào)子空間和噪聲子空間,子空間分解的結(jié)果用下面的式子表示:
31、
32、式(7)中,和分別表示信號(hào)子空間和噪聲子空間,基于上述的分解操作,二維music譜表示為下式(8):
33、
34、式(8)中,d和v分別表示距離和速度,c(d,v)為步驟2.7中定義的轉(zhuǎn)向矢量,表示噪聲子空間,(·)h表示共軛轉(zhuǎn)置。
35、步驟2.12:設(shè)置參數(shù)nd和nv,分別表示沿距離軸和速度軸方向上對(duì)二維music譜進(jìn)行采樣時(shí)的采樣點(diǎn)數(shù);
36、步驟2.13:根據(jù)步驟b5中描述的轉(zhuǎn)向矢量u(d)和b(v),計(jì)算二維music算法估計(jì)的最大距離范圍drange和最大速度范圍vrange,分別滿足和即有下式(9):
37、
38、步驟2.14:確認(rèn)算法應(yīng)用場(chǎng)景下感知目標(biāo)可以達(dá)到的的最大距離dmax和最大速率vmax,滿足0≤dk≤dmax和-vmax≤vk≤vmax,其中:同時(shí)需要保證保證波形參數(shù)的設(shè)置使得drange≥dmax和vrange≥vmax/2;
39、步驟2.15:根據(jù)上述三個(gè)步驟設(shè)置或計(jì)算的參數(shù),對(duì)二維music譜沿著距離軸和速度軸進(jìn)行采樣,記采樣后的二維離散music譜為pmusic,如下式(10):
40、
41、式(10)中,ηd=0,...,nd,nv=0,...,nv,通常的做法是將每個(gè)采樣點(diǎn)距離軸采樣點(diǎn)和速度軸采樣點(diǎn)分別設(shè)置為drangend/nd和vrange(nv/nv-0.5),使得二維music譜估計(jì)的距離和速度范圍分別為[0,drange]和[-vrange,vrange]/2,其中:速度采樣點(diǎn)的設(shè)置是為了能夠兼顧實(shí)際應(yīng)用中正負(fù)速率的存在。然而距離軸采樣點(diǎn)的設(shè)置使得感知譜峰通常出現(xiàn)在二維music譜的一側(cè),這樣的情況會(huì)使得模型的訓(xùn)練和預(yù)測(cè)效果受到影響,令β=dmax/drange≤1,通過(guò)式(10)距離軸采樣點(diǎn)的設(shè)置能夠使得二維度music譜pmusic中的距離軸上譜峰出現(xiàn)的位置位于[1-β,1+β]nd/2之間,即出現(xiàn)在二維譜中心的概率增大;
42、步驟2.16:將獲得的二維music譜pmusic輸入訓(xùn)練好的模型中,得到歸一化后的感知參數(shù)集和
43、步驟2.17:將獲得的感知參數(shù)集換算為感知目標(biāo)對(duì)應(yīng)的距離和速度,換算方法如下式(11)所示:
44、
45、根據(jù)上式(11)得到感知參數(shù)的估計(jì)結(jié)果和
46、步驟3:模型訓(xùn)練過(guò)程
47、步驟3.1:設(shè)定參數(shù)drange,vrange,dmax,vmax,感知目標(biāo)的數(shù)量設(shè)置為設(shè)定距離模糊度ηd和速度模糊度ηv,表示兩個(gè)目標(biāo)感知參數(shù)的相近程度,生成第一個(gè)感知目標(biāo)對(duì)應(yīng)的距離d1和v1,滿足0≤d1≤dmax和-vmax≤v1≤vmax,第二個(gè)感知目標(biāo)對(duì)應(yīng)的距離和速度根據(jù)模糊度計(jì)算如下式(12):
48、
49、步驟3.2:根據(jù)步驟c1生成訓(xùn)練用的數(shù)據(jù),生成20000個(gè)大小為nd×nv=40×40的2d-music譜作為訓(xùn)練數(shù)據(jù)來(lái)訓(xùn)練模型,訓(xùn)練數(shù)據(jù)中兩個(gè)譜峰的中心位置在music譜上隨機(jī)分布,速度模糊度ηv在0-0.5之間均勻分布,距離模糊度ηd在0-0.9之間均勻分布,同時(shí)5000個(gè)以相同方式生成的2d-music譜數(shù)據(jù)被生成作為驗(yàn)證集,在測(cè)試集中,目標(biāo)的距離模糊度以0.1為步進(jìn),從0增加到0.9,其它參數(shù)與訓(xùn)練集相同,每個(gè)距離模糊度生成5000個(gè)數(shù)據(jù),即測(cè)試集的總大小為50000;
50、步驟3.3:在模型訓(xùn)練過(guò)程中將均方誤差函數(shù)作為損失函數(shù):
51、
52、式(13)中,表示歸一化的感知參數(shù)集,且有下式(14):
53、
54、式(14)中,k=1,2,使用adam優(yōu)化器對(duì)參數(shù)進(jìn)行優(yōu)化;批大小設(shè)置為128;權(quán)重衰減率設(shè)置為0.00001;初始的學(xué)習(xí)率設(shè)置為0.001,當(dāng)驗(yàn)證集誤差在3輪內(nèi)下降幅度不超過(guò)百分之一時(shí),學(xué)習(xí)率除以10;模型總共訓(xùn)練60輪。
55、本發(fā)明所述方法的優(yōu)越技術(shù)效果如下:
56、1.本發(fā)明所述方法,利用殘差網(wǎng)絡(luò)較好的圖像處理能力和注意力機(jī)制的特征選擇能力,對(duì)二維music感知譜圖像進(jìn)行處理,在分離相近目標(biāo)上實(shí)現(xiàn)了更高的精度。
57、2.本發(fā)明所述方法,將感知參數(shù)的估計(jì)問(wèn)題建模為回歸預(yù)測(cè)問(wèn)題,直接輸出感知參數(shù),相較于劃分網(wǎng)格并預(yù)測(cè)譜峰位置的多分類間接估計(jì)方法,本方法的感知性能不受網(wǎng)格分辨率的限制。
58、3.本發(fā)明所述方法,通過(guò)調(diào)整對(duì)二維music譜的采樣方式,使得譜峰對(duì)稱分布在二維譜的中心附近,加速了模型收斂并最終增強(qiáng)了模型性能。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!