一種基于大數據的智慧園區安防數據預警方法及系統與流程
本發明涉及安防預警,具體為一種基于大數據的智慧園區安防數據預警方法及系統。
背景技術:
1、隨著園區的規模擴大與功能多樣化,園區內人車混合通行,缺乏紅綠燈等交通管制設施,導致人車之間缺乏明確的通行規則和秩序,極易發生碰撞、刮蹭等事故。傳統的安防措施如保安巡邏等難以有效應對復雜的人車交通狀況,難以保障園區內人員和車輛的安全。
2、現階段,針對園區安防預警方面,通常采用動態視頻檢測結合人工判斷進行異常識別,這種方法存在一定弊端。一方面,現有技術中的動態檢測只是簡單進行像素閾值對比判斷,無法準確區分人車正常行駛和交通事故的區別。只是依靠動態檢測則容易產生大量誤報警情況,容易影響管理人員的工作積極性。另一方面,攝像頭拍攝范圍與局部清晰度存在反比關系,出于減少監控盲區的考慮,通常默認選擇最大拍攝范圍。這也導致即使是發生交通事故也無法清晰的觀察到局部畫面的具體細節,無法提前進行風險預警也就不能及時調整拍攝角度和光學焦距來放大事故畫面,由此造成后續的提證困難以及事故無法清晰定責。所以現階段需要一種更加智能、高效的安防數據預警技術方案,來解決上述問題。
技術實現思路
1、本發明的目的在于提供一種基于大數據的智慧園區安防數據預警方法及系統,以解決上述背景技術中提出的問題。
2、為了解決上述技術問題,本發明提供一種基于大數據的智慧園區安防數據預警方法,包括以下步驟:
3、s100、采集園區的交通路線圖以及車輛的歷史日志,通過安裝在園區內的監控設備實時采集視頻圖像。
4、s200、分析視頻圖像中的車輛和行人并定義目標對象,根據車輛對象的歷史記錄計算行為系數,預測車輛對象和行人對象的移動軌跡,劃分關注區并計算風險系數。
5、s300、通過關注區的風險系數以及像素變化情況計算異動指數,根據異動指數定義風險區并調整監控設備的拍攝角度和焦距變化,提高風險區的畫面占比。
6、s400、安防監控室通過可視化界面實時展示各監控設備的視頻圖像,突出顯示風險區的實時視頻圖像,自動預警至管理人員進行處理。
7、在s100中,交通路線圖是指用于展示園區內部行駛道路的平面圖。歷史日志是指車輛的進出記錄,進出記錄是指車輛進入園區到離開園區的信息記錄,每條進出記錄包括車牌號和行駛視頻集。行駛視頻集由不同監控設備采集到同一輛車在園區內部不同位置的視頻片段組成;監控設備安裝在園區內行駛道路兩側,用于實時采集行駛道路的視頻圖像。
8、監控設備的視頻畫面中可能會同時出現多臺車輛,根據每臺車輛存在于視頻畫面的時間段分別截取視頻片段。
9、每臺車輛在園區內不同位置行駛時會被不同監控設備所拍攝,對視頻圖像中的車輛對象進行目標識別,以及通過車牌號確認身份信息。
10、根據車牌號將不同監控設備拍攝到的同一臺車輛的視頻片段進行關聯,將每臺車輛進入園區到離開園區這段時間內所產生的多個視頻片段共同組合為行駛視頻集。
11、在s200中,具體步驟如下:
12、s201、采用目標識別算法分析各攝像頭采集的視頻圖像,將行人目標和車輛目標分別作為行人對象和車輛對象,使用yolo算法和svm算法檢測每個車輛對象的車牌并識別車牌號。在交通路線圖中標注各攝像頭所在位置,獲取距離園區出入口最近攝像頭的視頻圖像,分析并標記進入園區的車輛對象。
13、s202、獲取標記車輛對象dxsign的車牌號lpnsign,在歷史日志中檢索車牌號lpnsign對應的全部進出記錄,將這些進出記錄下的行駛視頻集全部拆分為視頻片段。分析視頻片段中標記車輛對象dxsign的行駛情況,將行駛距離除以行駛時長得到行駛速度;根據每條視頻片段所處時間段,以及不同時刻下的行駛速度繪制速度折線圖,每條視頻片段對應一張速度折線圖。
14、時間作為速度折線圖的橫軸,行駛速度作為速度折線圖的縱軸,速度折線圖能夠直觀表示對應視頻片段中標記車輛對象的行駛速度變化情況。
15、s203、設置變速時長c,標注速度折線圖中行駛速度發生變化的時間節點,將行駛速度連續增加或減少,且間隔時長小于c的多個時間節點共同組合為變速區。將變速區下所有時間節點的行駛速度極差除以變速區的持續時長得到變速度,計算速度折線圖中所有變速區的變速度平均值以及持續時長總和ctn,代入公式中計算得到標記車輛對象dxsign的行為系數wxsign:
16、
17、式中,m為標記車輛對象dxsign的視頻片段數量,jln為第n條視頻片段中標記車輛對象dxsign的總行駛距離,ztn為第n條視頻片段的持續時長。分別計算每個標記車輛對象的行為系數。
18、時間節點是指速度折線圖中行駛速度發生增加或減少對應的時間點。變速區內所有時間節點下行駛速度發生改變方向都相同,都為增加或都為減少。行駛速度極差是指車輛行駛速度在變速區對應時間段內的變化量,變速度為變速區的平均加速度。
19、s204、分析每個監控設備當前視頻圖像中標記車輛對象的行駛方向和行駛速度,設置減速時長q,將行駛速度乘以q得到移動距離md。以標記車輛對象當前位置為起點,按照行駛方向在交通路線圖上沿著行駛道路設置距離為md的路線作為預測移動軌跡。分析視頻圖像中預測移動軌跡兩側行人對象的移動方向,根據行人對象的位置以及移動方向建立向量標記向量與預測移動軌跡相交的行人對象。
20、減速時長由管理人員事先設定,具體取值參考車輛行駛過程中從開始剎車到車輛完全停止下來所需的最大時長。預測移動軌跡的長度根據標記車輛對象當前行駛速度和減速時長計算得到,具體形狀由交通路線圖上對應道路形狀所決定。
21、s205、設置距離u,以標記行人對象為中心,u為直徑建立圓形區域,組合相交的圓形區域后作為關注區。統計與關注區相交的預測移動軌跡條數j,獲取這些預測移動軌跡對應標記車輛對象的行為系數,代入公式計算每個關注區的風險系數:
22、
23、式中,fx為風險系數,h為關注區內標記行人對象數量,wxi為與關注區相交的第i條預測移動軌跡對應標記車輛對象的行為系數。
24、在s300中,具體步驟如下:
25、s301、在每臺監控設備的視頻圖像中標注關注區所在位置,使用opencv技術持續抽取視頻圖像中時間連續的單幀圖像,獲取單幀圖像的像素點數psum以及每個關注區的像素點數pfx。
26、使用opencv技術持續抽取視頻圖像中的單幀圖像時,需確保以合適的頻率抽取圖像。既不能頻率過高浪費算力資源造成無效檢測,也不能頻率過低導致視頻重要信息丟失造成檢測精度下降。
27、s302、分析單幀圖像內相比與上一張單幀圖像中顏色發生變化的像素點并標記,統計單幀圖像內所有標記像素點數psch以及每個關注區的標記像素點數pfch,代入公式計算每個關注區的異動指數:
28、
29、式中yz為異動指數,α為常數。
30、s303、設置指數閾值e以及采樣次數k,將連續k張單幀圖像內異動指數都大于e的關注區設為風險區。標記視頻畫面中存在風險區的攝像頭,標記攝像頭自動調整拍攝角度以及焦距,使得所有風險區的圖像最大化占據整個視頻畫面。
31、在s400中,安防監控室通過可視化界面實時展示各監控設備拍攝的視頻畫面,重點標注每個關注區。當關注區變為風險區時,第一時間突出顯示風險區的實時視頻圖像,并將畫面自動預警至管理人員的智能終端設備。
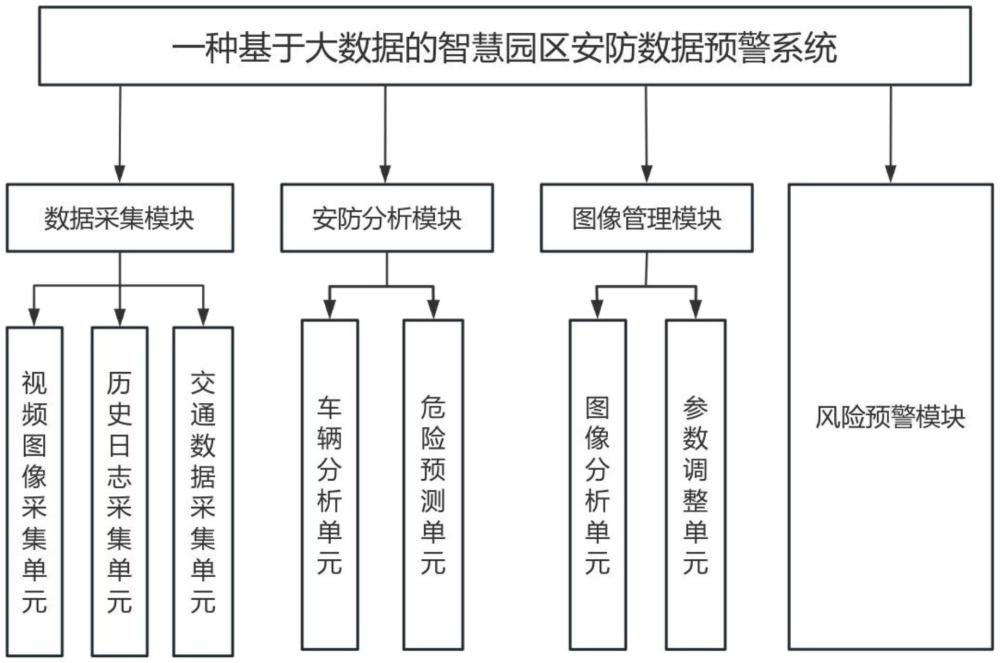
32、一種基于大數據的智慧園區安防數據預警系統,包括數據采集模塊、安防分析模塊、圖像管理模塊和風險預警模塊。
33、數據采集模塊用于采集園區的交通路線圖以及車輛的歷史日志,通過監控設備實時采集園區內視頻圖像。
34、安防分析模塊通過視頻圖像中的車輛和行人定義目標對象,根據車輛對象的歷史記錄計算行為系數,預測車輛對象和行人對象的移動軌跡,劃分關注區并計算風險系數。
35、圖像管理模塊通過像素變化情況計算異動指數,根據異動指數定義風險區并調整監控設備的參數,提高風險區的畫面占比。
36、風險預警模塊用于展示各監控設備的視頻圖像,突出顯示風險區的實時視頻圖像并自動預警。
37、數據采集模塊包括視頻圖像采集單元、歷史日志采集單元和交通數據采集單元。
38、視頻圖像采集單元用于采集視頻圖像,通過安裝在園區內的監控設備實時采集行駛道路的視頻圖像。
39、歷史日志采集單元用于采集車輛的進出記錄,進出記錄是指車輛進入園區到離開園區的信息記錄,每條進出記錄包括車牌號和行駛視頻集。行駛視頻集由不同監控設備采集到同一輛車在園區內部不同位置的視頻片段組成。
40、交通數據采集單元用于采集園區的交通路線圖,交通路線圖是指園區內部行駛道路的平面圖。
41、安防分析模塊包括車輛分析單元和危險預測單元。
42、車輛分析單元用于計算車輛對象的行為系數。
43、首先,識別視頻圖像中的行人對象和車輛對象,并檢測車輛對象車牌號。分析交通路線圖中各攝像頭位置,標記距離園區出入口最近攝像頭的視頻圖像中進入園區的車輛對象。獲取標記車輛對象dxsign的車牌號lpnsign,在歷史日志中檢索車牌號lpnsign對應的全部進出記錄,將這些進出記錄下的行駛視頻集全部拆分為視頻片段。
44、其次,分析視頻片段中標記車輛對象dxsign的行駛速度,根據每條視頻片段所處時間段,以及不同時刻下的行駛速度繪制速度折線圖。設置變速時長c,標注速度折線圖中行駛速度發生變化的時間節點,將行駛速度連續增加或減少,且間隔時長小于c的多個時間節點共同組合為變速區。將變速區下所有時間節點的行駛速度極差除以變速區的持續時長得到變速度,計算速度折線圖中所有變速區的變速度平均值以及持續時長總和ctn。
45、最后,根據公式計算得到標記車輛對象dxsign的行為系數wxsign,其中,m為標記車輛對象dxsign的視頻片段數量,jln為第n條視頻片段中標記車輛對象dxsign的總行駛距離,ztn為第n條視頻片段的持續時長。分別計算每個標記車輛對象的行為系數。
46、危險預測單元用于劃分關注區并計算風險系數。
47、首先,分析每個監控設備當前視頻圖像中標記車輛對象的行駛方向和行駛速度,設置減速時長q,將行駛速度乘以q得到移動距離md。以標記車輛對象當前位置為起點,按照行駛方向在交通路線圖上沿著行駛道路設置距離為md的路線作為預測移動軌跡。
48、其次,分析視頻圖像中預測移動軌跡兩側行人對象的移動方向,根據行人對象的位置以及移動方向建立向量標記向量與預測移動軌跡相交的行人對象。設置距離u,以標記行人對象為中心,u為直徑建立圓形區域,組合相交的圓形區域后作為關注區。
49、最后,統計與關注區相交的預測移動軌跡條數j,獲取這些預測移動軌跡對應標記車輛對象的行為系數,根據公式計算每個關注區的風險系數fx。其中,h為關注區內標記行人對象數量,wxi為與關注區相交的第i條預測移動軌跡對應標記車輛對象的行為系數。
50、圖像管理模塊包括圖像分析單元和參數調整單元。
51、圖像分析單元用于計算每個關注區的異動指數。
52、首先,在每臺監控設備的視頻圖像中標注關注區所在位置,使用0pencv技術持續抽取視頻圖像中時間連續的單幀圖像。
53、其次,獲取單幀圖像的像素點數psum以及每個關注區的像素點數pfx;再分析單幀圖像內相比與上一張單幀圖像中顏色發生變化的像素點并標記。
54、最后,統計單幀圖像內所有標記像素點數psch以及每個關注區的標記像素點數pfch,根據公式計算每個關注區的異動指數。其中,α為常數。
55、參數調整單元用于調整攝像頭參數。設置指數閾值e以及采樣次數k,將連續k張單幀圖像內異動指數都大于e的關注區設為風險區。
56、標記視頻畫面中存在風險區的攝像頭,標記攝像頭自動調整拍攝角度以及焦距,使得所有風險區的圖像最大化占據整個視頻畫面。
57、風險預警模塊通過可視化界面實時展示各監控設備拍攝的視頻畫面,重點標注每個關注區。當關注區變為風險區時,第一時間將畫面預警至管理人員的智能終端設備。
58、與現有技術相比,本發明所達到的有益效果是:
59、高效的異常分析:本技術中通過分析歷史記錄,計算每臺標記車輛對象的行為系數。通過預測車輛對象和行人對象的移動軌跡從而劃分關注區,根據關注區內行人對象數量以及車輛對象的行為系數來計算關注區的風險系數。相比于現有技術對所有監控畫面進行無差別檢測方式更加高效,異常分析更加具有目標性和高效性。
60、智能的危險預測:本技術中通過分析各監控設備視頻圖像中像素變化情況,結合關注區的風險系數計算異動指數。根據異動指數定義風險區并提前調整監控設備的拍攝角度和焦距變化,提高風險區的畫面占比。相比于現有技術對監控畫面進行人工手動調整或者事后調取方式更加高效,危險預測更加具有預見性和精準性。
61、綜上所述,本發明相比于傳統技術具有高效的異常分析和智能的危險預測優勢,能夠提高安防監控預警能力和準確度。
- 還沒有人留言評論。精彩留言會獲得點贊!