一種基于LoS-MIMO信道認(rèn)知的自適應(yīng)傳輸方法與流程
背景技術(shù):
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明針對(duì)現(xiàn)有系統(tǒng)中存在的上述不足,提供一種基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法。
2、本發(fā)明提供一種基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,包括:
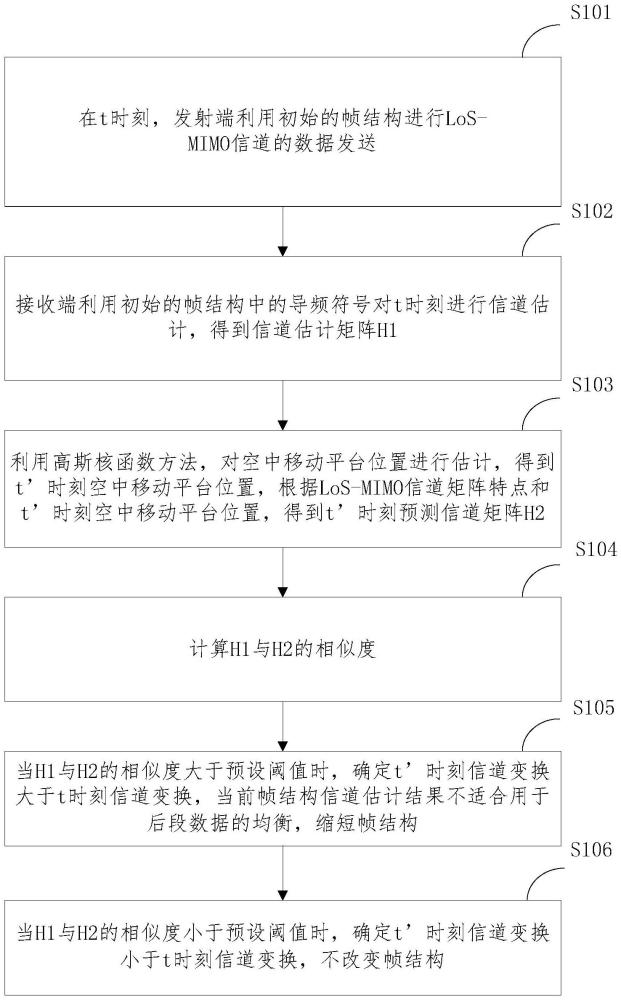
3、在t時(shí)刻,發(fā)射端利用初始的幀結(jié)構(gòu)進(jìn)行l(wèi)os-mimo信道的數(shù)據(jù)發(fā)送;
4、接收端利用初始的幀結(jié)構(gòu)中的導(dǎo)頻符號(hào)對(duì)t時(shí)刻進(jìn)行信道估計(jì),得到信道估計(jì)矩陣h1;
5、利用高斯核函數(shù)方法,對(duì)空中移動(dòng)平臺(tái)位置進(jìn)行估計(jì),得到t′時(shí)刻空中移動(dòng)平臺(tái)位置,根據(jù)los-mimo信道矩陣特點(diǎn)和t′時(shí)刻空中移動(dòng)平臺(tái)位置,得到t′時(shí)刻預(yù)測(cè)信道矩陣h2;
6、計(jì)算h1與h2的相似度;
7、當(dāng)h1與h2的相似度大于預(yù)設(shè)閾值η時(shí),確定t′時(shí)刻信道變換大于t時(shí)刻信道變換,當(dāng)前幀結(jié)構(gòu)信道估計(jì)結(jié)果不適合用于后段數(shù)據(jù)的均衡,縮短所述幀結(jié)構(gòu);
8、當(dāng)h1與h2的相似度小于預(yù)設(shè)閾值η時(shí),確定t′時(shí)刻信道變換小于t時(shí)刻信道變換,不改變所述幀結(jié)構(gòu)。
9、優(yōu)選的,計(jì)算h1與h2的相似度,包括:
10、按照以下公式計(jì)算h1與h2的相似度:
11、det(h2-1h1-i)
12、其中,i為單位矩陣,所述信道估計(jì)矩陣h1與所述預(yù)測(cè)信道矩陣h2完全相同時(shí),det(h2-1h1-i)=0。
13、優(yōu)選的,接收端利用初始的幀結(jié)構(gòu)中的導(dǎo)頻符號(hào)對(duì)t時(shí)刻進(jìn)行信道估計(jì),得到信道估計(jì)矩陣h1之后,還包括:
14、對(duì)信道估計(jì)矩陣h1列向量進(jìn)行相關(guān)性計(jì)算,若相關(guān)性低于設(shè)定閾值,采用高碼率高階調(diào)制方式,若相關(guān)性高于設(shè)定閾值,采用低碼率低階調(diào)制方式。
15、優(yōu)選的,初始的幀結(jié)構(gòu)包括多個(gè)子幀,一個(gè)子幀包含多個(gè)時(shí)刻,幀結(jié)構(gòu)的幀頭部分包含幀頭同步信息和控制信息,子幀包括1個(gè)導(dǎo)頻符號(hào)和20個(gè)業(yè)務(wù)信息符號(hào)。
16、優(yōu)選的,接收端利用初始的幀結(jié)構(gòu)中的導(dǎo)頻符號(hào)對(duì)t時(shí)刻進(jìn)行信道估計(jì),得到信道估計(jì)矩陣h1,包括:
17、針對(duì)傳輸距離范圍和角度范圍,在los-mimo固定天線間隔為d的情況下,以發(fā)端天線為x軸水平面建立直角坐標(biāo)系,對(duì)第一根收發(fā)天線間夾角θ、第一根收發(fā)天線間距離r、接收天線與y軸的夾角將其在[θmin,θmax]、[rmin,rmax]、范圍內(nèi)分割為多個(gè)候選點(diǎn);
18、利用格點(diǎn)搜索方法,對(duì)θ,r進(jìn)行搜索,其優(yōu)化函數(shù)表示為:其中p為導(dǎo)頻矩陣,y是接收信號(hào),h是待估計(jì)的信道;
19、以為目標(biāo),對(duì)候選點(diǎn)進(jìn)行選擇優(yōu)化,根據(jù)優(yōu)化后的結(jié)果得到信道估計(jì)矩陣h1。
20、優(yōu)選的,根據(jù)優(yōu)化后的結(jié)果得到信道估計(jì)矩陣h1,包括:
21、將優(yōu)化得到的第一根收發(fā)天線間夾角、第一根收發(fā)天線間距離、接收天線與y軸的夾角帶入以下公式,得到接收天線n2與發(fā)送天線n1間的距離
22、
23、其中,d1是第n1根發(fā)天線與第一根發(fā)天線間距離,d1=(n1-1)d,d2是第n2根收天線與第一根收天線間距離,d2=(n2-1)d;
24、信道估計(jì)矩陣h1的信道元素表示為:j為復(fù)數(shù),fc表示載波頻率。
25、優(yōu)選的,利用高斯核函數(shù)方法,對(duì)下一導(dǎo)頻符號(hào)前t′時(shí)刻空中移動(dòng)平臺(tái)位置進(jìn)行估計(jì),得到t′時(shí)刻空中移動(dòng)平臺(tái)位置,包括:
26、空中移動(dòng)平臺(tái)的msi位置信息發(fā)端和收端空中移動(dòng)平臺(tái)的位置分別表示為xt=(xt,yt,zt)和xr=(xr,yr,zr);空中移動(dòng)平臺(tái)位置x坐標(biāo)預(yù)測(cè)的輸入輸出分別是過(guò)去的x坐標(biāo)信息ix={xr(t-t),...,xr(t-1)}和未來(lái)的x坐標(biāo)信息ox={xr(t),...,xr(t+tf)},其中,tf表示從時(shí)刻t開(kāi)始向后預(yù)測(cè)的時(shí)刻數(shù),t表示從時(shí)刻t開(kāi)始向前采用的歷史信息時(shí)刻數(shù);位置x坐標(biāo)的輸出與輸入之間的關(guān)系表示為ox=f(ix),其中f是潛在的高斯函數(shù);空中移動(dòng)平臺(tái)位置x坐標(biāo)歷史信息構(gòu)成的大小為k的訓(xùn)練集記為包含x坐標(biāo)未來(lái)信息的大小為s的測(cè)試集記為訓(xùn)練集的輸入和輸出分別聚合為矩陣i=[ix,1,...,ix,k]t知o=[ox,1,...,ox,k]t;
27、選取空中移動(dòng)平臺(tái)位置預(yù)測(cè)的核函數(shù)為k=k1+k2,其中,k1為線性核函數(shù),k2為平方指數(shù)核函數(shù);
28、在特定數(shù)據(jù)集上通過(guò)最大化邊緣似然函數(shù)得到核函數(shù)的最優(yōu)的超參數(shù)估計(jì)其中,θgp為超參數(shù);
29、由此能夠得到訓(xùn)練后的輸出分布和具體測(cè)試集上輸出未來(lái)的空中移動(dòng)平臺(tái)位置x坐標(biāo)的預(yù)測(cè)分布其中,為預(yù)測(cè)分布的均值,為預(yù)測(cè)分布的方差,ox*、ix*表示測(cè)試集的輸出;
30、未來(lái)的空中移動(dòng)平臺(tái)x坐標(biāo)通過(guò)預(yù)測(cè)分布的均值估計(jì),即ox={xr(t),...,xr(t+tf)}聚合成的矩陣ox=[ox,1,...,ox,k]t的估計(jì)值為
31、將其中未來(lái)t′時(shí)刻x坐標(biāo)估計(jì)值記為y坐標(biāo)和z坐標(biāo)的預(yù)測(cè)方法與之同理,則得到和未來(lái)t′時(shí)刻空中移動(dòng)平臺(tái)位置預(yù)測(cè)值為
32、優(yōu)選的,根據(jù)los-mimo信道矩陣特點(diǎn)和t′時(shí)刻空中移動(dòng)平臺(tái)位置,得到t′時(shí)刻預(yù)測(cè)信道矩陣h2,包括:
33、根據(jù)和t′時(shí)刻空中移動(dòng)平臺(tái)位置預(yù)測(cè)值得到t′時(shí)刻預(yù)測(cè)信道結(jié)果h2。
34、優(yōu)選的,縮短所述幀結(jié)構(gòu),包括:
35、減少業(yè)務(wù)信息符號(hào)數(shù)量或減少單位時(shí)間傳輸?shù)淖訋臄?shù)量。
36、優(yōu)選的,所述方法還包括:
37、縮短幀結(jié)構(gòu)后,若設(shè)定時(shí)間段內(nèi),所述相似度保持小于預(yù)設(shè)閾值η,則增加幀結(jié)構(gòu)長(zhǎng)度。
38、本發(fā)明利用高斯核函數(shù)對(duì)未來(lái)時(shí)隙空中移動(dòng)平臺(tái)位置預(yù)測(cè)從而得到未來(lái)時(shí)刻信道矩陣信息,將其與利用導(dǎo)頻信息進(jìn)行信道估計(jì)得到的當(dāng)前狀態(tài)信道信息對(duì)比,根據(jù)兩信道之間的相似程度,對(duì)發(fā)送端幀結(jié)構(gòu)進(jìn)行優(yōu)化。實(shí)現(xiàn)信道質(zhì)量好、信道變換慢情況下采用長(zhǎng)幀結(jié)構(gòu)傳輸,提升傳輸速率。在信道質(zhì)量差、信道變換快情況下采用短幀結(jié)構(gòu)傳輸,確保傳輸可靠性。
技術(shù)特征:
1.一種基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,計(jì)算h1與h2的相似度,包括:
3.根據(jù)權(quán)利要求1所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,接收端利用初始的幀結(jié)構(gòu)中的導(dǎo)頻符號(hào)對(duì)t時(shí)刻進(jìn)行信道估計(jì),得到信道估計(jì)矩陣h1之后,還包括:
4.根據(jù)權(quán)利要求1所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,初始的幀結(jié)構(gòu)包括多個(gè)子幀,一個(gè)子幀包含多個(gè)時(shí)刻,幀結(jié)構(gòu)的幀頭部分包含幀頭同步信息和控制信息,子幀包括1個(gè)導(dǎo)頻符號(hào)和20個(gè)業(yè)務(wù)信息符號(hào)。
5.根據(jù)權(quán)利要求1所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,接收端利用初始的幀結(jié)構(gòu)中的導(dǎo)頻符號(hào)對(duì)t時(shí)刻進(jìn)行信道估計(jì),得到信道估計(jì)矩陣h1,包括:
6.根據(jù)權(quán)利要求5所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,根據(jù)優(yōu)化后的結(jié)果得到信道估計(jì)矩陣h1,包括:
7.根據(jù)權(quán)利要求1所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,利用高斯核函數(shù)方法,對(duì)下一導(dǎo)頻符號(hào)前t′時(shí)刻空中移動(dòng)平臺(tái)位置進(jìn)行估計(jì),得到t′時(shí)刻空中移動(dòng)平臺(tái)位置,包括:
8.根據(jù)權(quán)利要求7所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,根據(jù)los-mimo信道矩陣特點(diǎn)和t′時(shí)刻空中移動(dòng)平臺(tái)位置,得到t′時(shí)刻預(yù)測(cè)信道矩陣h2,包括:
9.根據(jù)權(quán)利要求1所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,縮短所述幀結(jié)構(gòu),包括:
10.根據(jù)權(quán)利要求1所述的基于los-mimo信道認(rèn)知的自適應(yīng)傳輸方法,其特征在于,所述方法還包括:
技術(shù)總結(jié)
本發(fā)明公開(kāi)了一種基于LoS?MIMO信道認(rèn)知的自適應(yīng)傳輸方法,包括:在t時(shí)刻,發(fā)射端利用初始的幀結(jié)構(gòu)進(jìn)行LoS?MIMO信道的數(shù)據(jù)發(fā)送;接收端利用初始的幀結(jié)構(gòu)中的導(dǎo)頻符號(hào)對(duì)t時(shí)刻進(jìn)行信道估計(jì),得到信道估計(jì)矩陣H<subgt;1</subgt;;利用高斯核函數(shù)方法,對(duì)空中移動(dòng)平臺(tái)位置進(jìn)行估計(jì),得到t′時(shí)刻空中移動(dòng)平臺(tái)位置,根據(jù)LoS?MIMO信道矩陣特點(diǎn)和t′時(shí)刻空中移動(dòng)平臺(tái)位置,得到t′時(shí)刻預(yù)測(cè)信道矩陣H<subgt;2</subgt;;計(jì)算H<subgt;1</subgt;與H<subgt;2</subgt;的相似度;當(dāng)H<subgt;1</subgt;與H<subgt;2</subgt;的相似度大于預(yù)設(shè)閾值η時(shí),確定t′時(shí)刻信道變換大于t時(shí)刻信道變換,當(dāng)前幀結(jié)構(gòu)信道估計(jì)結(jié)果不適合用于后段數(shù)據(jù)的均衡,縮短幀結(jié)構(gòu)。實(shí)現(xiàn)信道質(zhì)量好、信道變換慢情況下采用長(zhǎng)幀結(jié)構(gòu)傳輸,提升傳輸速率。在信道質(zhì)量差、信道變換快情況下采用短幀結(jié)構(gòu)傳輸,確保傳輸可靠性。
技術(shù)研發(fā)人員:楊健,張永亮,尚佳棟,許文俊,賈步云,唐晨亮,趙誠(chéng),高暉,張凱
受保護(hù)的技術(shù)使用者:北京遙感設(shè)備研究所
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!