一種智能搬運(yùn)AGV定位通訊方法及系統(tǒng)與流程
本發(fā)明涉及智能物流,具體涉及一種智能搬運(yùn)agv定位通訊方法及系統(tǒng)。
背景技術(shù):
1、隨著自動(dòng)化技術(shù)的不斷發(fā)展,agv(自動(dòng)導(dǎo)引車)在倉(cāng)儲(chǔ)、物流等領(lǐng)域的應(yīng)用日益廣泛,為了實(shí)現(xiàn)agv的高效協(xié)同作業(yè),系統(tǒng)需要實(shí)時(shí)獲取和傳輸agv的位置信息,以確保其準(zhǔn)確定位和順利運(yùn)行。
2、然而,在大規(guī)模agv系統(tǒng)中,傳統(tǒng)的位置信息傳輸方式存在顯著的挑戰(zhàn)。首先,agv在工作過(guò)程中會(huì)產(chǎn)生大量的實(shí)時(shí)定位數(shù)據(jù),頻繁傳輸全量數(shù)據(jù)會(huì)導(dǎo)致網(wǎng)絡(luò)負(fù)擔(dān)過(guò)重,從而影響系統(tǒng)響應(yīng)速度和數(shù)據(jù)傳輸效率;其次,agv間的定位信息更新通常以全量數(shù)據(jù)形式進(jìn)行傳輸,忽略了數(shù)據(jù)變化的特點(diǎn),造成了不必要的冗余傳輸,浪費(fèi)了通信資源。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明中提供了一種智能搬運(yùn)agv定位通訊方法及系統(tǒng),從而有效解決背景技術(shù)中所指出的問(wèn)題。
2、為了達(dá)到上述目的,本發(fā)明所采用的技術(shù)方案是:
3、一種智能搬運(yùn)agv定位通訊方法,包括:
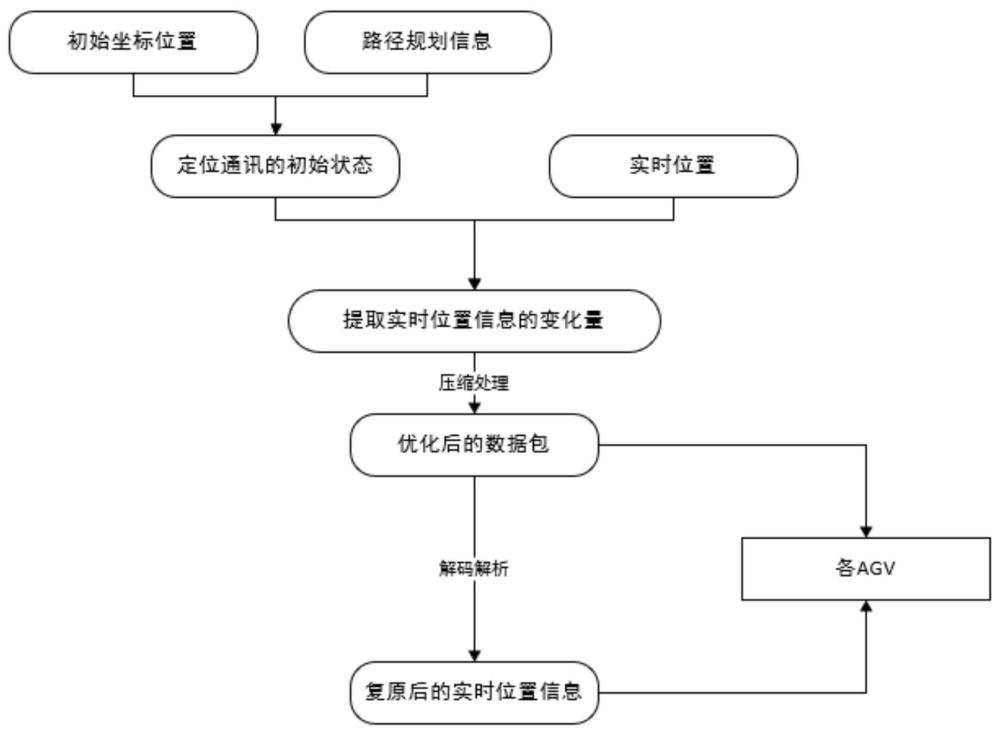
4、獲取各agv?的初始坐標(biāo)位置和路徑規(guī)劃信息,建立定位通訊的初始狀態(tài);
5、實(shí)時(shí)獲取各所述agv的實(shí)時(shí)位置,并利用增量更新算法提取實(shí)時(shí)位置信息的變化量;
6、對(duì)增量數(shù)據(jù)進(jìn)行壓縮處理,生成優(yōu)化后的數(shù)據(jù)包,并通過(guò)無(wú)線通訊鏈路將壓縮后的增量數(shù)據(jù)實(shí)時(shí)傳輸至各agv;
7、對(duì)增量數(shù)據(jù)包進(jìn)行解碼和解析,復(fù)原各agv的實(shí)時(shí)位置信息,并通過(guò)無(wú)線通訊共享解析后的位置信息至各agv。
8、進(jìn)一步地,獲取各agv?的初始坐標(biāo)位置和路徑規(guī)劃信息,建立定位通訊的初始狀態(tài),包括:
9、確定各agv的初始坐標(biāo)及方向信息,作為初始化的參考數(shù)據(jù);
10、為各agv預(yù)設(shè)路徑規(guī)劃信息,所述路徑規(guī)劃信息包括任務(wù)目標(biāo)、行駛路線及關(guān)鍵路徑點(diǎn),得到各agv初步的任務(wù)執(zhí)行指令;
11、將初始化的所述參考數(shù)據(jù)和路徑規(guī)劃數(shù)據(jù)同步至中央控制系統(tǒng),并進(jìn)行數(shù)據(jù)校準(zhǔn)。
12、進(jìn)一步地,利用增量更新算法提取實(shí)時(shí)位置信息的變化量,包括:
13、將實(shí)時(shí)位置信息與上一次傳輸?shù)奈恢眯畔⑦M(jìn)行比較,計(jì)算坐標(biāo)和方向的變化量,生成位置增量數(shù)據(jù);
14、對(duì)所述位置增量數(shù)據(jù)進(jìn)行閾值判定,篩選出超過(guò)通訊閾值的變化量;
15、將符合閾值的變化量數(shù)據(jù)格式化為增量數(shù)據(jù)包,并附帶時(shí)間戳和agv標(biāo)識(shí)信息。
16、進(jìn)一步地,將符合閾值的變化量數(shù)據(jù)格式化為增量數(shù)據(jù)包,并附帶時(shí)間戳和agv標(biāo)識(shí)信息,包括:
17、收集復(fù)合預(yù)定閾值條件的增量數(shù)據(jù),并統(tǒng)計(jì)每個(gè)增量值在各agv中出現(xiàn)的頻率,生成頻率表;
18、基于所述頻率表,采用霍夫曼算法構(gòu)建二叉樹(shù),并根據(jù)頻率合并低頻增量值節(jié)點(diǎn),生成霍夫曼樹(shù);
19、從霍夫曼樹(shù)的根節(jié)點(diǎn)開(kāi)始向下分配二進(jìn)制編碼,形成霍夫曼編碼表;
20、使用霍夫曼編碼表將增量數(shù)據(jù)轉(zhuǎn)換為對(duì)應(yīng)的霍夫曼編碼,并將編碼后的數(shù)據(jù)進(jìn)行壓縮,準(zhǔn)備通過(guò)無(wú)線通訊鏈路進(jìn)行傳輸。
21、進(jìn)一步地,對(duì)增量數(shù)據(jù)進(jìn)行壓縮處理,生成優(yōu)化后的數(shù)據(jù)包,并通過(guò)無(wú)線通訊鏈路將壓縮后的增量數(shù)據(jù)實(shí)時(shí)傳輸至各agv,包括:
22、采用循環(huán)冗余技術(shù),將壓縮編碼結(jié)果與校驗(yàn)碼、時(shí)間戳和agv標(biāo)識(shí)信息整合,組裝為完整數(shù)據(jù)包;
23、基于無(wú)線通訊協(xié)議,為各agv分配獨(dú)立的通訊信道,建立與各agv之間的無(wú)線通訊鏈路,利用所述無(wú)線通訊鏈路,將優(yōu)化后的數(shù)據(jù)包實(shí)時(shí)傳輸至各目標(biāo)agv。
24、進(jìn)一步地,基于無(wú)線通訊協(xié)議,為各agv分配獨(dú)立的通訊信道,建立與各agv之間的無(wú)線通訊鏈路,包括:
25、基于所述無(wú)線通訊協(xié)議,為各agv分配唯一的信道標(biāo)識(shí);
26、采用對(duì)稱加密算法,對(duì)各所述通訊信道進(jìn)行加密處理,并基于動(dòng)態(tài)秘鑰管理機(jī)制,定期更新加密秘鑰;
27、通過(guò)信道認(rèn)證和信號(hào)驗(yàn)證,對(duì)所述無(wú)線通訊鏈路進(jìn)行初始化,并完成所述無(wú)線通訊鏈路的構(gòu)建。
28、進(jìn)一步地,所述對(duì)稱加密算法為aes算法。
29、進(jìn)一步地,對(duì)增量數(shù)據(jù)包進(jìn)行解碼和解析,復(fù)原各agv的實(shí)時(shí)位置信息,并通過(guò)無(wú)線通訊共享解析后的位置信息至各agv,包括:
30、基于接收到的增量數(shù)據(jù)包,提取其中的霍夫曼編碼數(shù)據(jù)、時(shí)間戳以及agv標(biāo)識(shí)信息;
31、利用預(yù)設(shè)的霍夫曼編碼表,對(duì)霍夫曼編碼數(shù)據(jù)進(jìn)行解碼,恢復(fù)增量數(shù)據(jù);
32、根據(jù)所述時(shí)間戳和agv標(biāo)識(shí)信息,將所述增量數(shù)據(jù)還原為完整的實(shí)時(shí)位置信息,包括當(dāng)前位置坐標(biāo)和方向信息;
33、將解析后的實(shí)時(shí)位置信息通過(guò)無(wú)線通訊鏈路廣播至各agv,進(jìn)行實(shí)時(shí)共享。
34、一種智能搬運(yùn)agv定位通訊系統(tǒng),所述系統(tǒng)包括:
35、初始狀態(tài)建立模塊,獲取各agv?的初始坐標(biāo)位置和路徑規(guī)劃信息,建立定位通訊的初始狀態(tài);
36、變化量提取模塊,實(shí)時(shí)獲取各所述agv的實(shí)時(shí)位置,并利用增量更新算法提取實(shí)時(shí)位置信息的變化量;
37、增量數(shù)據(jù)傳輸模塊,對(duì)增量數(shù)據(jù)進(jìn)行壓縮處理,生成優(yōu)化后的數(shù)據(jù)包,并通過(guò)無(wú)線通訊鏈路將壓縮后的增量數(shù)據(jù)實(shí)時(shí)傳輸至各agv;
38、增量數(shù)據(jù)解析模塊,對(duì)增量數(shù)據(jù)包進(jìn)行解碼和解析,復(fù)原各agv的實(shí)時(shí)位置信息,并通過(guò)無(wú)線通訊共享解析后的位置信息至各agv。
39、進(jìn)一步地,初始狀態(tài)建立模塊包括:
40、參考數(shù)據(jù)確定單元,確定各agv的初始坐標(biāo)及方向信息,作為初始化的參考數(shù)據(jù);
41、執(zhí)行指令獲取單元,為各agv預(yù)設(shè)路徑規(guī)劃信息,所述路徑規(guī)劃信息包括任務(wù)目標(biāo)、行駛路線及關(guān)鍵路徑點(diǎn),得到各agv初步的任務(wù)執(zhí)行指令;
42、數(shù)據(jù)校準(zhǔn)單元,將初始化的所述參考數(shù)據(jù)和路徑規(guī)劃數(shù)據(jù)同步至中央控制系統(tǒng),并進(jìn)行數(shù)據(jù)校準(zhǔn)。
43、通過(guò)本發(fā)明的技術(shù)方案,可實(shí)現(xiàn)以下技術(shù)效果:
44、有效解決了agv定位通訊中的數(shù)據(jù)傳輸效率問(wèn)題,減少了傳輸量,提升了定位數(shù)據(jù)通訊的實(shí)時(shí)性與準(zhǔn)確性。
技術(shù)特征:
1.一種智能搬運(yùn)agv定位通訊方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的智能搬運(yùn)agv定位通訊方法,其特征在于,獲取各agv?的初始坐標(biāo)位置和路徑規(guī)劃信息,建立定位通訊的初始狀態(tài),包括:
3.根據(jù)權(quán)利要求1所述的智能搬運(yùn)agv定位通訊方法,其特征在于,利用增量更新算法提取實(shí)時(shí)位置信息的變化量,包括:
4.根據(jù)權(quán)利要求3所述的智能搬運(yùn)agv定位通訊方法,其特征在于,將符合閾值的變化量數(shù)據(jù)格式化為增量數(shù)據(jù)包,并附帶時(shí)間戳和agv標(biāo)識(shí)信息,包括:
5.根據(jù)權(quán)利要求1所述的智能搬運(yùn)agv定位通訊方法,其特征在于,對(duì)增量數(shù)據(jù)進(jìn)行壓縮處理,生成優(yōu)化后的數(shù)據(jù)包,并通過(guò)無(wú)線通訊鏈路將壓縮后的增量數(shù)據(jù)實(shí)時(shí)傳輸至各agv,包括:
6.根據(jù)權(quán)利要求5所述的智能搬運(yùn)agv定位通訊方法,其特征在于,基于無(wú)線通訊協(xié)議,為各agv分配獨(dú)立的通訊信道,建立與各agv之間的無(wú)線通訊鏈路,包括:
7.根據(jù)權(quán)利要求6所述的智能搬運(yùn)agv定位通訊方法,其特征在于,所述對(duì)稱加密算法為aes算法。
8.根據(jù)權(quán)利要求1所述的智能搬運(yùn)agv定位通訊方法,其特征在于,對(duì)增量數(shù)據(jù)包進(jìn)行解碼和解析,復(fù)原各agv的實(shí)時(shí)位置信息,并通過(guò)無(wú)線通訊共享解析后的位置信息至各agv,包括:
9.一種智能搬運(yùn)agv定位通訊系統(tǒng),其特征在于,所述系統(tǒng)包括:
10.根據(jù)權(quán)利要求9所述的智能搬運(yùn)agv定位通訊系統(tǒng),其特征在于,初始狀態(tài)建立模塊包括:
技術(shù)總結(jié)
本發(fā)明涉及智能物流技術(shù)領(lǐng)域,具體涉及一種智能搬運(yùn)AGV定位通訊方法及系統(tǒng),方法包括:獲取各AGV的初始坐標(biāo)位置和路徑規(guī)劃信息,建立定位通訊的初始狀態(tài);實(shí)時(shí)獲取各AGV的實(shí)時(shí)位置,并利用增量更新算法提取實(shí)時(shí)位置信息的變化量;對(duì)增量數(shù)據(jù)進(jìn)行壓縮處理,生成優(yōu)化后的數(shù)據(jù)包,并通過(guò)無(wú)線通訊鏈路將壓縮后的增量數(shù)據(jù)實(shí)時(shí)傳輸至各AGV;對(duì)增量數(shù)據(jù)包進(jìn)行解碼和解析,復(fù)原各AGV的實(shí)時(shí)位置信息,并通過(guò)無(wú)線通訊共享解析后的位置信息至各AGV。通過(guò)本發(fā)明,有效解決了AGV定位通訊中的數(shù)據(jù)傳輸效率問(wèn)題,減少了傳輸量,提升了定位數(shù)據(jù)通訊的實(shí)時(shí)性與準(zhǔn)確性。
技術(shù)研發(fā)人員:劉茜,高慎遠(yuǎn),陸曉青,張欣燃,曾佑林
受保護(hù)的技術(shù)使用者:常州奧比利智能科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!