一種高精度喂料系統的制作方法
本技術涉及禽類飼養設備,具體涉及一種高精度喂料系統。
背景技術:
1、隨著養殖行業的飼喂方式由傳統向高效化邁進,養殖方式也從粗獷的人工向自動化智能化過渡。現有技術中,高效化的多層籠養雞場常采用行車系統進行飼喂,傳統行車沒有專門設置位置檢測功能,無法很好地定位行車,且下料過程中無法根據下料箱內的料量即時調整出料速度,此外傳統行車也無法檢測運動過程中是否出現打滑。前述原因均會使得傳統行車在工作過程中的給料精度較低。
技術實現思路
1、本實用新型實施例提供一種下料裝置、下料行車及喂料系統,以解決現有技術中為多層籠的養雞場設計的行車系統,其給料精度較低的問題。
2、為實現上述目的,本實用新型實施例采取以下的技術方案:
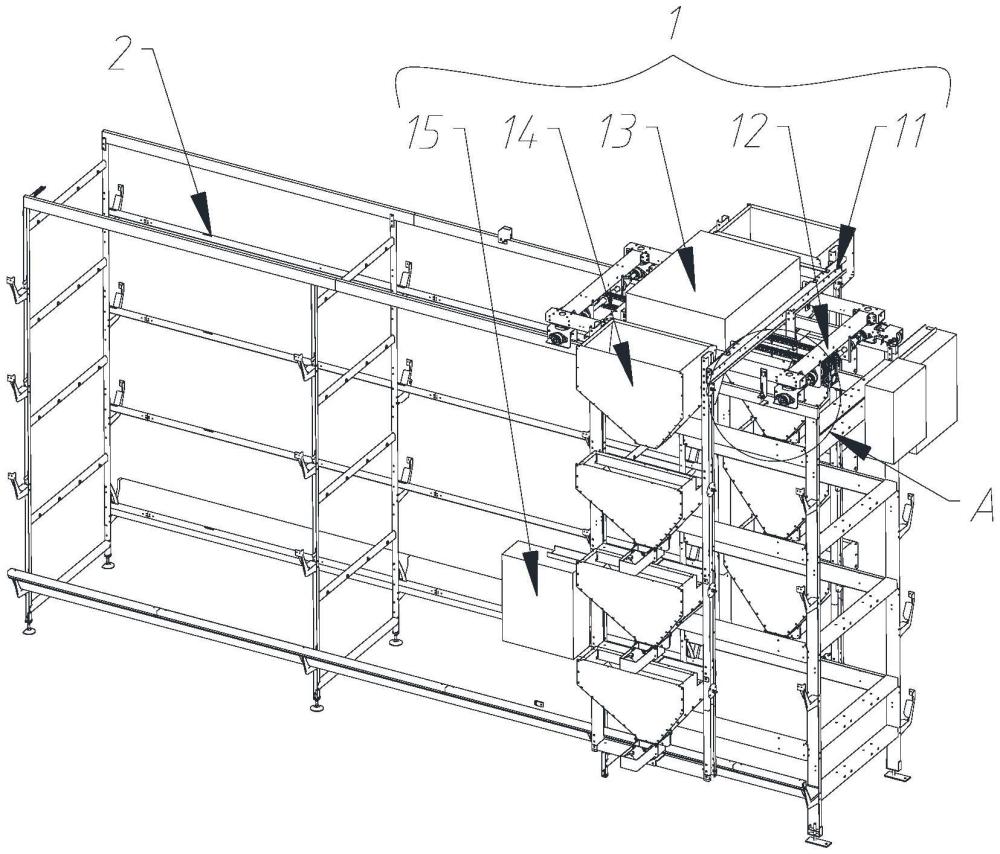
3、一種高精度喂料系統,包括下料行車和飼養籠架,下料行車可滑動地安裝在飼養籠架上,飼養籠架在縱向上劃分有多層;
4、下料行車包括行車架、驅動模組、下料箱和操作控制單元,驅動模組用于驅動下料行車沿飼養籠架運動,且行車架由驅動模組承載,行車架上縱向設置有與飼養籠架的各層對應的多個下料箱,操作控制單元用于供操作員控制下料行車,且操作控制單元內安裝有用于儲存程序的plc;
5、下料行車上設置有與操作控制單元電連接的定位接近開關,在飼養籠架上沿下料行車的運動軌跡中的原點、工作位點以及折返點設置了多個定位塊,定位接近開關到達各定位塊處時均會觸發給出相應電信號并傳遞給操作控制單元,操作控制單元內還安裝有編碼器,定位接近開關觸發并給出的電信號由編碼器記錄;
6、行車架上用于支撐下料箱的支撐位置處安裝有與操作控制單元電連接的稱重傳感器,稱重傳感器用于感知下料箱的重量變化,下料箱包括料斗和出料絞龍,操作控制單元以稱重傳感器的信號為依據控制出料絞龍的轉速;
7、驅動模組包括驅動架和安裝在驅動架底部的與飼養籠架接觸的驅動輪,驅動輪滾動驅使驅動模組運動,驅動架上連接安裝有無動力的可轉動的測試輪,測試輪通過彈簧與飼養籠架接觸并壓緊,驅動模組還包括用于檢測測試輪轉動的運動感應器,運動感應器與操作控制單元電連接。
8、進一步地,所述高精度喂料系統還包括配供電單元,配供電單元安裝在行車架的頂部,配供電單元與操作控制單元電連接。
9、進一步地,所述下料箱還包括出料電機,出料電機驅動出料絞龍,出料電機與操作控制單元電連接,出料電機為步進電機。
10、進一步地,所述行車架為“門”字形,行車架的兩側在縱向上相對應地設置有多個支撐條,由支撐條承載各個下料箱。
11、進一步地,所述支撐條直接支撐于下料箱的底部,或者支撐條懸掛支撐于下料箱中的料斗的側面中部。
12、進一步地,驅動架的下方安裝有輸出軸;
13、輸出軸上固定安裝有驅動其轉動的驅動電機,驅動輪安裝于輸出軸的兩端;
14、驅動電機為伺服電機。
15、進一步地,所述驅動架呈框型,驅動架的兩端下方各自安裝有輸出軸,兩個輸出軸之間通過傳動鏈連接實現同步轉動,驅動電機安裝在其中一個輸出軸上。
16、進一步地,所述測試輪外包覆安裝有輪殼,測試輪能在輪殼內轉動,輪殼與驅動架可轉動地連接,彈簧連接在輪殼與驅動架之間。
17、進一步地,所述運動感應器為光電感應器,運動感應器安裝在輪殼上,且朝向測試輪的側面,測試輪的側面設置有輻條或者貼條。
18、進一步地,所述運動感應器為加速度感應器,運動感應器安裝在測試輪上。
19、本實用新型的有益效果為:
20、本實用新型實施例提供的下料裝置,通過在下料行車上設置定位接近開關、在飼養籠架上設置定位塊來對下料行車的各個關鍵工作點位進行標記,并記錄定位接近開關觸發信息,使得下料行車的運動過程中能對工作位置準確定位;通過在下料箱和承載下料箱的行車架之間設置稱重傳感器來獲知料斗內料量并即時調整出料電機轉速,提升下料箱內的出料量的精確性;通過在驅動模組內設置用于檢測驅動輪是否出現打滑的測試輪,保證了下料行車的運動過程的動力傳輸可靠性;通過上述三個方面進行改進,使得本實用新型實施例提供的高精度喂料系統具有較高的給料精度。
技術特征:
1.一種高精度喂料系統,其特征在于,包括下料行車(1)和飼養籠架(2),下料行車(1)可滑動地安裝在飼養籠架(2)上,飼養籠架(2)在縱向上劃分有多層;
2.根據權利要求1所述的高精度喂料系統,其特征在于,所述高精度喂料系統還包括配供電單元(13),配供電單元(13)安裝在行車架(11)的頂部,配供電單元(13)與操作控制單元(15)電連接。
3.根據權利要求1所述的高精度喂料系統,其特征在于,所述下料箱(14)還包括出料電機(143),出料電機驅動出料絞龍(142),出料電機(143)與操作控制單元(15)電連接,出料電機(143)為步進電機。
4.根據權利要求1所述的高精度喂料系統,其特征在于,所述行車架(11)為“門”字形,行車架(11)的兩側在縱向上相對應地設置有多個支撐條(111),由支撐條(111)承載各個下料箱(14)。
5.根據權利要求4所述的高精度喂料系統,其特征在于,所述支撐條(111)直接支撐于下料箱(14)的底部,或者支撐條(111)懸掛支撐于下料箱(14)中的料斗(141)的側面中部。
6.根據權利要求1所述的高精度喂料系統,其特征在于,驅動架(121)的下方安裝有輸出軸(122);
7.根據權利要求6所述的高精度喂料系統,其特征在于,所述驅動架(121)呈框型,驅動架(121)的兩端下方各自安裝有輸出軸(122),兩個輸出軸(122)之間通過傳動鏈(123)連接實現同步轉動,驅動電機(124)安裝在其中一個輸出軸(122)上。
8.根據權利要求1所述的高精度喂料系統,其特征在于,所述測試輪(125)外包覆安裝有輪殼(1251),測試輪(125)能在輪殼(1251)內轉動,輪殼(1251)與驅動架(121)可轉動地連接,彈簧(1252)連接在輪殼(1251)與驅動架(121)之間。
9.根據權利要求8所述的高精度喂料系統,其特征在于,所述運動感應器(1253)為光電感應器,運動感應器(1253)安裝在輪殼(1251)上且朝向測試輪(125)的側面,測試輪(125)的側面設置有輻條或者貼條。
10.根據權利要求8所述的高精度喂料系統,其特征在于,所述運動感應器(1253)為加速度感應器,運動感應器(1253)安裝在測試輪(125)上。
技術總結
本技術提供一種高精度喂料系統,包括下料行車和飼養籠架,下料行車包括行車架、驅動模組、下料箱和操作控制單元;下料行車上設置有定位接近開關,在飼養籠架上設置了多個定位塊,定位接近開關到達各定位塊處時均會觸發給出相應電信號并傳遞給操作控制單元;行車架上用于支撐下料箱的支撐位置處安裝有感知下料箱的重量變化的稱重傳感器,下料箱包括料斗和出料絞龍,以稱重傳感器的信號為依據控制出料絞龍的轉速;驅動模組包括驅動架和驅動輪,驅動架上連接安裝有無動力的可轉動的測試輪,測試輪通過彈簧與飼養籠架接觸并壓緊,驅動模組還包括用于檢測測試輪轉動的運動感應器。本技術提供的高精度喂料系統,具有較高的給料精度。
技術研發人員:趙明華,梁啟新,麥焯偉,呂曉能,黎振雄,梁煜勝,李臻,梁浩
受保護的技術使用者:南牧裝備科技有限公司
技術研發日:20240620
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!