一種智能化的高空樹枝修剪裝置及其修剪方法與流程
本發明涉及配網電力運維裝備,尤其涉及一種智能化的高空樹枝修剪裝置及其修剪方法。
背景技術:
1、配電沿線種樹可以美化環境,穩固土壤,預防桿塔傾斜倒塌,保障供電安,還能屏蔽配電設備運行的噪音,阻擋風沙灰塵侵襲設備,但樹枝與配電線路也需要保持安全距離,否則樹木過高、生長過密,在風雨天氣可能觸碰電線,引發線路短路、跳閘、甚至火災等供電故障,為保障電力供應的穩定性,同時為了方便運維人員定期觀察電線的外觀狀況,指導后續開展檢修、更換部件等操作,需要定期對沿線超出安全距離的樹枝進行修剪。
2、目前的高空樹枝修剪均是人工作業,采用高枝鋸、高空修枝剪、油鋸等專業工具,借助升降機、高空作業車進行高空作業,作業人員需近距離接觸高壓電線,稍有不慎就可能觸碰電線,引發觸電事故,每年因修剪樹枝觸碰電線造成的電力工人傷亡事件不在少數,對生命安全構成巨大威脅,工作人員在數米甚至十幾米的高空作業,一旦防護措施不到位、體力不支或者遭遇突發天氣狀況,極易發生高空墜落,造成嚴重傷殘。
3、隨著配電線路里程數不斷增長,沿線需要修剪的樹枝范圍持續擴大,依靠人工修剪,要投入的人力成本居高不下,給供電企業帶來沉重經濟負擔。
4、同時人工修剪速度慢,作業人員的勞動強度大,面對復雜地形、惡劣天氣時,作業人員行動受阻,難以快速響應樹枝修剪需求,遇上緊急的樹障隱患,難以及時排除,影響供電可靠性。
技術實現思路
1、本發明的目的是針對上述背景技術中提出的問題,提供一種智能化的高空樹枝修剪裝置及其修剪方法,包括吊運無人機、沿線行走機器人、電動沖擊高枝鋸、遠程控制平臺。
2、所述的吊運無人機為四旋翼無人機,機身和起落架為一體結構,可垂直起降,機身中部設有安裝板,上面安裝動力系統、控制系統、通信系統,平衡升降滑桿,傳感器、圓形吸附電磁鐵。
3、動力系統的電機由鋰電池提供動力,由電子調速器控制轉速和扭矩,傳遞給四個旋翼產生升力和推力,控制系統具備姿態控制、航向控制、高度控制、自動飛行、防撞系統、北斗定位等功能,通信系統與遠程控制系統進行數據傳輸。傳感器安裝在平衡升降滑桿上端,實時監測飛行姿態、高度和位置信息,圓形吸附電磁鐵安裝在平衡升降滑桿底端,用于吸附沿線行走機器人頂部的圓形鐵塊;圓形電磁鐵兩側設有伸縮桿,可伸出起防墜保險作用,平衡升降滑桿由四根碳纖維輕質管和鋼絲組成,在卷揚電機作用下,鋼絲收卷帶動碳纖維管沿安裝板上的滑套軸向滑移,當需要吸附連接沿線行走機器人時,平衡升降滑桿下降至最低位,圓形吸附電磁鐵伸出起落架外側,便于對接,防止碰撞。
4、飛行時平衡升降滑桿上升至最高位,輔助飛行平衡,頂端的傳感器監測飛行狀態,無人機飛行至架空電線上方,平衡升降滑桿下降,將沿線行走機器人放置在架空電線上,再上升飛離。
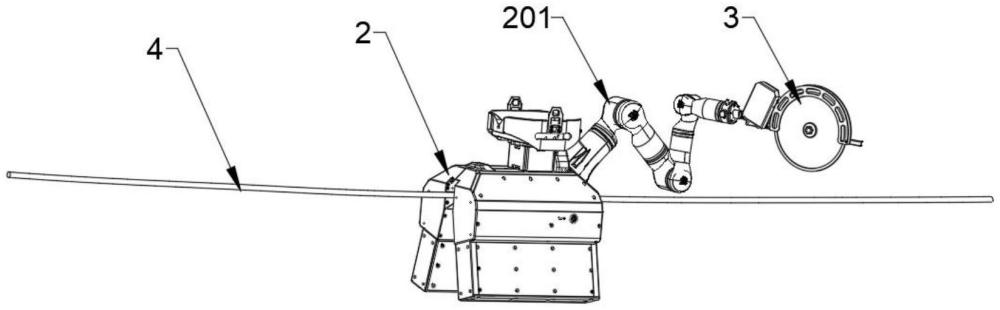
5、所述的沿線行走機器人包括沿線行走裝置,固定在裝置側上方的機械臂,以及數據采集模塊、機器人控制模塊和電源模塊。
6、進一步的,沿線行走裝置包括截面∧型機架、吊裝組件,v型滾輪、伺服電機、配重塊,吊裝組件安裝在∧型機架正上方,底部為用于吊裝吸附的圓形鐵塊,鐵塊上方為倒錐形喇叭口圓盒,引導無人機吊裝接口進行定位對接,喇叭口上方兩側裝有帶孔插板,無人機吊裝接口吸附對接后兩側伸出橫桿,插入插板的孔中,防止斷電等因素造成吸附力不足而使沿線行走機器人掉落,喇叭口圓盒內安裝有北斗空間位置發生器,用于控制無人機精準吊裝。
7、兩個v型滾輪平行安裝在∧型機架內部的頂端,在兩個伺服電機的驅動下在架空電線正上方同步滾動,實現沿線行走。
8、∧型機架兩側的下端安裝配重塊,在重力作用下,沿線行走機器人在架空電線上作業不會發生側翻。
9、所述的機械臂包括多組旋轉關節和電機驅動系統,旋轉關節讓機械臂連桿繞軸轉動,實現全角度姿態變化和伸縮運動,帶動前端的電動沖擊高枝鋸完成作業范圍內的全部鋸切操作。
10、電源模塊通過電機驅動系統為關節運動提供動力,伺服電機精準控制關節的轉角、轉速與扭矩。
11、∧型機架上方一側安裝數據采集模塊和機器人控制模塊,數據采集模塊包括射像頭和數據傳感器,捕捉環境圖像,輔助定位、識別物體,感知接觸力。
12、機器人控制模塊與遠程控制平臺通過無線信號傳輸連接,接收平臺指令,調控驅動系統,讓機械臂實現智能化的精準切割作業。
13、所述的電動沖擊高枝鋸,包括作業機構和位于其上的鋸切控制模塊和充電電池。
14、進一步的,所述作業機構包括鋸座、鋸切電機、沖擊傳動機構和圓盤切割鋸片。
15、所述的鋸座底端安裝法蘭盤與沿線行走裝置的機械臂連接,前端一側安裝圓盤切割鋸片,并配制鋸片護罩,保證鋸片的使用安全,另一側安裝電機,電池驅動電機旋轉,并通過沖擊傳動機構將旋轉傳遞至圓盤鋸片轉動,實施切割作業。
16、進一步的,所述的沖擊傳動機構包括鋸切電機的傳動軸a、壓縮彈簧、沖擊結構固定座、沖擊傳動機構、傳動軸b、傳動錐齒輪組。
17、在作業時,鋸切電機通過傳動軸a輸出扭矩,并通過沖擊結構固定座內的沖擊傳動機構,和上方的傳動軸b、將扭矩傳遞至傳動錐齒輪組,帶動鋸片轉動。
18、當樹枝硬度高而出現卡鋸時,壓縮彈簧、沖擊結構固定座和沖擊傳動機構三者相互旋轉并產生內部撞擊,使圓盤切割鋸片震動,促使鋸片脫離樹枝的束縛。
19、所述的鋸切控制模塊為驅動電路、調速電路與通信接口,遠程控制平臺依據預設程序,分析所有收集的數據,算出電機該有的轉速和轉向,并發出對應的控制指令,通信接口接收指令,用于控制電機作業。
20、所述的遠程控制平臺包括微處理器、存儲器、顯示屏、信號發射器、信號接收器、輸入輸出接口、操作手柄組件和按鈕等。
21、信號接收器接收無人機通信系統,沿線行走機器人控制模塊和電動沖擊高枝鋸鋸切控制模塊發出的信號,通過微處理器進行分析計算,人工操作手柄組件和按鈕并發出相關指令,通過信號發射器進行傳輸,所有信息保存在存儲器內,并通過顯示屏上進行人機信息交互。
22、本發明還提供了一種智能化的高空樹枝修剪方法,包括如下步驟:
23、s1、電動沖擊高枝鋸固定安裝
24、使用緊固螺栓,將電動沖擊高枝鋸安裝在沿線行走機器人機械臂的前端,吸附的圓形鐵塊朝上。
25、s2、沿線行走機器人吊裝
26、遠程操控吊運無人機起飛,飛行至沿線行走機器人正上方懸停,將平衡升降滑桿下降至最低位,圓形吸附電磁鐵伸出起落架外側,與沿線行走機器人的圓形鐵塊吸附對接,電磁鐵兩側的伸縮桿伸出插入插板孔內,防止故障墜落。
27、平衡升降滑桿上升至最高位,將沿線行走機器人吊至起落架內,再上升飛行,至架空電線正上方懸停。平衡升降滑桿下降至最低位,將沿線行走機器人放置在架空電線上,兩個滾輪與架空電線接觸,縮回伸縮桿,電磁鐵斷電解吸。
28、吊運無人機飛離架空電線,平衡升降滑桿上升至最高位,并停回地面。
29、s3、操控沿線行走機器人
30、按數據采集模塊的信息,確定沿線行走機器人所在的架空電線兩側樹枝的修剪范圍,根據遠程控制平臺顯示屏的3d圖像制定剪切方案。
31、s4、電動沖擊高枝鋸作業
32、開啟電動沖擊高枝鋸,進行樹枝鋸切操作,待完成修剪范圍的全部鋸切,沿線行走機器人沿線前進或后退,根據數據采集模塊的信息,重新確定修剪范圍并開啟作業。
33、s5、更換線路
34、操控吊運無人機飛行至沿線行走機器人正上方,按s2將沿線行走機器人吊運至其他需要樹枝修剪的架空電線上,按上述s3、s4重新開啟作業。
35、s6、沿線行走機器人吊回地面
36、作業全部完成后,操控吊運無人機將沿線行走機器人吊回地面,將電動沖擊高枝鋸拆離存放。
37、本發明的有益效果:
38、1、采用沿線行走機器人沿線作業,避免作業人員高空近距離接觸高壓電線引發觸電事故,防止高空墜落,保障作業人員的生命安全,降低勞動強度,提高配網檢修的自動化水平。
39、2、采用吊運無人機進行高空吊裝,代替升降機、高空作業車裁人作業,可以提高作業效率,減少出行裝備,更利于野外復雜地形的樹枝修剪作業。如遇惡劣天氣環境,可以快速響應緊急樹障救援,確保供電可靠性。
40、3、傳感器技術成熟,圖像傳感器精度高,能夠精準測出樹枝的修剪范圍,生成高精度的3d模型,精確測定樹枝位置,指導電動沖擊高枝鋸精確鋸切作業。
41、4、遠程監控、實時數據傳輸,智能控制精準,可進一步采用人工智能算法賦能,使沿線行走機器人能完成自動化修剪。
42、5、電動沖擊高枝鋸的驅動機構采用了沖擊傳動機構,當樹枝較硬卡鋸時,鋸體會沖擊震動使切割鋸片擺脫束縛,順利完成作業。
- 還沒有人留言評論。精彩留言會獲得點贊!