一種提示最佳啟動時間的羽毛球高遠球輔助訓練系統
本發明涉及體育訓練設備,尤其涉及一種提示最佳啟動時間的羽毛球高遠球輔助訓練系統。
背景技術:
1、羽毛球作為一項集速度、技巧和策略于一體的高強度競技運動,近年來在全球范圍內得到了廣泛的普及和發展。高水平的羽毛球比賽不僅要求運動員具備出色的體能和技術,還需在瞬間做出精準的判斷和動作協調,尤其是在執行高遠球等關鍵擊球動作時,正確的啟動時機對擊球效果至關重要。
2、在傳統的羽毛球訓練中,運動員主要依賴教練的現場指導和自身的經驗積累來優化擊球動作和時機。然而,這種訓練方式存在諸多局限性。首先,教練的觀察和反饋往往受限于主觀因素,難以全面、客觀地捕捉運動員在高速運動中的每一個細微動作。其次,運動員在實際比賽中面臨的動態變化和壓力環境,使得依賴主觀判斷的訓練效果難以完全轉化為實戰能力。
3、為了彌補傳統訓練方法的不足,市場上出現了一些輔助訓練設備和系統。這些設備通常通過攝像頭、傳感器等技術手段,對運動員的動作進行監測和分析,并提供一定程度的反饋。例如,部分訓練系統能夠記錄運動員的揮拍速度、角度等參數,幫助運動員理解自身動作的特點。然而,這些現有的輔助訓練設備大多集中于動作參數的記錄與分析,缺乏實時性和智能化的提示功能,無法在運動員執行關鍵擊球動作時,及時提供最佳啟動時機的指導。
4、此外,羽毛球擊球動作的成功與否不僅取決于運動員的揮拍技術,還與其與羽毛球下落軌跡的同步性密切相關。現有的訓練系統往往未能充分考慮羽毛球的動態下落過程與運動員動作的實時協調,導致運動員在實際比賽中難以實現動作與球軌跡的高度同步,從而影響擊球的準確性和有效性。
5、綜上所述,當前羽毛球訓練領域亟需一種能夠綜合監測運動員動作和羽毛球下落軌跡,實時分析并提示最佳啟動時機的輔助訓練系統。該系統應具備高精度的動作捕捉能力、實時的數據處理與分析功能,以及智能化的反饋機制,以幫助運動員在訓練中實現動作與球軌跡的精準同步,提升擊球的效果和競技水平。
技術實現思路
1、本發明的目的在于提供一種提示最佳啟動時間的羽毛球高遠球輔助訓練系統,是一種結合可穿戴傳感器、攝像系統及智能數據分析技術,精確監測運動員的關鍵動作與羽毛球的下落軌跡,實時計算并提示最佳的蹬腿啟動時機,從而幫助運動員實現揮拍與羽毛球下落的高度同步,提升擊球的準確性和競技表現。
2、本發明的發明思路為:本發明提供一種提示最佳啟動時間的羽毛球高遠球輔助訓練系統,具體為通過實時監測和分析運動員動作與運動物體(如羽毛球)軌跡,實現動作優化與同步提示的智能化體育訓練系統;該系統旨在提升羽毛球運動員在高遠球等關鍵擊球動作中的啟動時機準確性和擊球效果,適用于專業訓練、業余訓練及體育科研等多個應用場景。
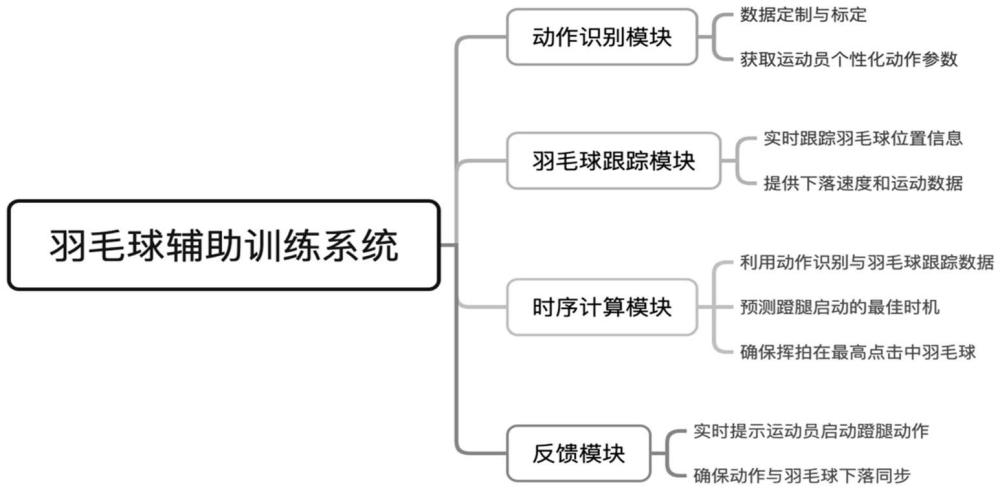
3、為了實現上述發明目的,本發明采用技術方案具體為:一種提示最佳啟動時間的羽毛球高遠球輔助訓練系統,由以下模塊組成:
4、m1.動作識別模塊:用于數據定制與標定,幫助獲取運動員的個性化動作參數。
5、m2.羽毛球跟蹤模塊:實時跟蹤羽毛球的位置信息和下落速度,提供羽毛球的運動數據。
6、m3.時序計算模塊:基于前兩個模塊的輸出,預測蹬腿啟動的最佳時機tstart,確保揮拍在最高點時擊中羽毛球。其中,tstart是系統預測出來的蹬腿啟動的最佳時機。
7、m4.反饋模塊:根據時序計算結果,實時提示運動員啟動蹬腿動作,確保動作與羽毛球下落同步。
8、其中,m1動作識別模塊包括:m1.1運動員腳底壓力傳感器模塊和m1.2.羽毛球球拍跟蹤模塊。
9、m1.1運動員腳底壓力傳感器模塊的功能是:檢測并輸出運動員何時做出蹬腿動作。實現步驟:
10、s1.1.1在運動員鞋內安裝壓力傳感器,實時監測腳底壓力變化。具體實現步驟為:
11、選擇薄膜壓力傳感器,將薄膜壓力傳感器安裝在鞋墊的前腳掌區域,覆蓋腳掌最常承受壓力的部位(腳趾和腳掌中部),以監測推力和推進。傳感器數量:根據需要,前腳掌區域可以布置多個傳感器點(例如4-8個傳感器)來提供詳細的壓力分布信息。
12、通過薄膜壓力傳感器的電阻變化,產生模擬電壓信號。該信號與壓力大小成正比。
13、傳感器輸出的模擬電壓信號通過adc轉換為數字信號。每個傳感器的數據都會被獨立轉換。adc設置采樣頻率200hz,確保在運動過程中能捕捉到足夠的信號變化。對傳感器信號進行基本的噪聲濾波,采用低通濾波器,去除高頻噪聲,平滑信號。壓力數據歸一化:根據傳感器的標定數據,將傳感器輸出的數值轉換為標準的壓力單位(牛頓)。其中,adc指的是模數轉換。
14、信號采集電路的實現:1.使用電阻分壓電路來讀取壓力傳感器的電阻變化,轉化為電壓信號。2.將多個壓力傳感器的輸出通過適當的模擬多路復用器匯集到一個模擬輸入端。3.將模擬信號通過模數轉換器轉換為數字信號,輸出到微控制器進行處理;選擇esp32作為微控制器。4.adc分辨率:選擇至少10位的adc分辨率,以確保信號精度。其中,esp32是一款高性能、低功耗的wi-fi+藍牙雙模微控制器系統。
15、數據傳輸設計與實現:通過esp32內置藍牙,將采集到的壓力數據通過藍牙傳輸到移動設備或計算機,使用標準的藍牙低能耗協議。
16、藍牙數據傳輸的步驟包括:
17、a)數據打包:將多個傳感器的數據打包為一個數據包,包含傳感器編號、時間戳、壓力值等信息。
18、b)數據發送:通過藍牙將數據包傳輸到指定的移動設備或pc,確保數據實時性和穩定性。
19、c)連接管理:使用藍牙的配對與連接管理機制,確保數據采集設備與接收設備之間的穩定連接。
20、d)數據傳輸頻率:設定數據發送頻率為每秒鐘傳輸20次數據包。
21、e)數據接收與解析:在pc端設計一個應用程序來接收和解析藍牙傳輸的數據。根據傳輸協議解析收到的數據包,并提取其中的壓力數據。
22、f)推力:基于前腳掌區域的壓力數據,估算出運動員的推力。
23、s1.1.2當檢測到推力驟增,判斷為蹬腿動作的開始時刻tkick。其中,tkick為運動員數據定制階段作出的蹬腿動作的開始時刻。
24、m1.2.羽毛球球拍跟蹤模塊的功能:跟蹤球拍拍頭的高度,確定球拍達到最高點的時刻和高度。實現步驟:
25、s1.2.1使用攝像頭(刷新率120hz以上)拍攝球拍的運動。
26、s1.2.2地面標定:首先標定地面位置,建立場地坐標系,坐標原點設為運動員的腳下。
27、s1.2.3球拍標記:在球拍拍頭安裝紅外線標記點,提高跟蹤精度。
28、s1.2.4球拍軌跡跟蹤:通過攝像系統實時捕捉球拍拍頭的運動軌跡,獲取其高度隨時間的變化。
29、s1.2.4數據處理:找到球拍拍頭達到最高點的時刻tpeak和對應的高度hracket。其中,tpeak為球拍拍頭達到最高點的時刻,hracket為球拍拍頭達到最高點的高度;
30、s1.2.5模塊輸出
31、從蹬腿動作開始到球拍拍頭到達最高點的時間間隔:
32、tswing=tpeak-tkick
33、其中tswing是從蹬腿動作開始到揮拍把球拍拍頭揮到最高點的時間間隔球拍在最高點時的高度hracket。
34、m2.羽毛球跟蹤模塊的功能是實時獲取羽毛球的位置信息、下落速度和距離地面的高度。模塊輸出:輸出每一幀的羽毛球的物理高度(t)和下落速度vy(t)。
35、其中,h(t)是羽毛球的物理高度,vy(t)是羽毛球的下落速度;
36、m2.羽毛球跟蹤模塊包括:m2.1目標識別子模塊;m2.2目標跟蹤子模塊;m2.3羽毛球軌跡估計與分析子模塊。
37、其中,m2.1目標識別子模塊的實現步驟包括:s2.1.1數據準備和訓練目標識別模型;s2.1.2目標識別執行。
38、其中,s2.1.1數據準備和訓練目標識別模型的實現步驟包括:
39、d)數據采集:
40、收集包含羽毛球的圖像或視頻數據,最好覆蓋不同的背景、光照、角度以及羽毛球的各種運動狀態。
41、標注數據:為每一張圖像或視頻幀標注羽毛球的位置(邊界框)。
42、e)數據預處理:
43、對圖像進行標準化處理,如調整圖像大小、顏色歸一化等。
44、數據增強:對訓練數據進行旋轉、翻轉、裁剪等操作,提高模型的魯棒性。
45、f)訓練目標識別模型:
46、使用目標識別算法yolov7-tiny來訓練一個識別羽毛球的模型。其中,yolov7-tiny是yolov7目標檢測模型的一個精簡版本。
47、確保模型能夠在不同的場景和光照下準確識別羽毛球。
48、其中,s2.1.2目標識別執行的實現步驟包括:
49、a)識別目標:
50、在視頻的每一幀中,使用訓練好的目標識別模型識別羽毛球的位置。該模型會輸出羽毛球的邊界框坐標以及置信度。
51、b)后處理:
52、設置置信度閾值(例如0.5),過濾掉低置信度的識別結果,避免誤檢。
53、m2.2.目標跟蹤子模塊的實現步驟包括:
54、s2.2.1選擇目標跟蹤算法
55、選擇使用kcf(kernelized?correlation?filter)跟蹤算法,通過上一幀的目標位置預測下一幀的位置。其中,kcf跟蹤算法指的是“核相關濾波跟蹤算法”。
56、s2.2.2初始化跟蹤器
57、在識別到的第一幀中,使用目標識別模型輸出的羽毛球位置(邊界框)來初始化跟蹤器。
58、s2.2.3跟蹤過程
59、a)更新目標位置:
60、在后續幀中,目標跟蹤器根據上一幀的目標位置,利用卡爾曼濾波預測羽毛球的當前位置。
61、跟蹤器通過圖像特征進行匹配,更新目標的邊界框,確保目標持續跟蹤。
62、b)修正跟蹤結果:
63、如果在某一幀中目標跟蹤失效(如目標遮擋、離開視野等),可以根據識別模型重新識別羽毛球的位置,修正跟蹤器的狀態。
64、如果目標在當前幀仍然可見且運動平穩,跟蹤器會繼續預測目標位置。
65、s2.2.4丟失目標恢復
66、在一些情況下(如遮擋或快速運動),跟蹤器可能會丟失目標。這時需要重新使用目標識別模型來定位羽毛球,并恢復目標跟蹤。
67、如果目標丟失的時間較長,跟蹤器需要重新初始化,基于當前識別結果開始新的跟蹤。
68、m2.3羽毛球軌跡估計與分析子模塊
69、根據羽毛球高遠球飛行特性可知,羽毛球飛行末段為垂直下落。初學者練習高遠球一般采用喂球方法,因此羽毛球下落位置是練習者的位置。本方法只關注羽毛球高遠球飛行末段的垂直下落;并且假設羽毛球掉落在地板的同一個位置。
70、羽毛球軌跡估計與分析子模塊的實現步驟包括:
71、s2.3.1.設置高度原點
72、將羽毛球掉落在地板的同一個位置,標定該位置為高度原點,即物理高度為0。
73、s2.3.2.標定像素到物理高度的比例
74、在視頻中,獲取羽毛球接觸地面時的像素坐標ydrop,對應物理高度為0。其中,ydrop是羽毛球接觸地面時的像素坐標。
75、用簡單的物理模型(1米高度的直立標尺)進行標定,得到比例系數k,計算出實際物理高度和像素坐標差值之間的比例;
76、
77、其中系數k是實際物理高度和像素坐標差值之間的比例;
78、s2.3.3.提取目標跟蹤結果
79、使用目標跟蹤子模塊實時跟蹤羽毛球的位置,獲取每一幀中羽毛球的像素坐標ypixel(t)。其中,ypixel(t)是當前時刻羽毛球的像素坐標;
80、s2.3.4.計算羽毛球的垂直高度
81、對于每一幀,利用羽毛球的像素坐標ypixel(t),計算羽毛球的物理高度h(t):
82、h(t)=(ydrop-ypixel(t))·k
83、其中,ypixel(t)是當前時刻羽毛球的像素坐標。h(t)是羽毛球的物理高度。
84、s2.3.5.計算下落速度
85、對于下落過程,羽毛球的垂直速度應該是位置隨時間的變化率。假設每幀之間的時間間隔為△t(通常為1/fps),通過下面的方法計算羽毛球的速度:
86、即時速度估算:使用位置差來近似計算速度。
87、
88、其中:
89、h(t)和h(t-1)是相鄰幀的羽毛球高度。
90、△t是兩幀之間的時間間隔。
91、vy(t)是羽毛球的瞬時速度。
92、s2.3.6.輸出結果
93、輸出每一幀的羽毛球的物理高度h(t)和下落速度vy(t)。
94、m3.時序計算模塊基于動作識別模塊和羽毛球跟蹤模塊的輸出數據,預測蹬腿啟動的最佳時機tstart,確保揮拍在最高點時擊中羽毛球。
95、實現步驟包括:
96、s3.1.啟動時機計算
97、羽毛球到達擊球高度的所需時間計算:
98、其中,δtshuttle是羽毛球到達擊球高度的所需時間;tshuttle=t+δtshuttle其中,t為當時時刻,tshuttle是羽毛球到達擊球高度的時刻;
99、最佳蹬腿啟動時機計算:
100、tstart=tshuttle-tswing
101、s3.2模塊輸出
102、蹬腿啟動的最佳時機tstart。
103、m4.反饋模塊根據時序計算模塊的結果,實時提示運動員啟動蹬腿動作,確保動作與羽毛球下落同步。實現步驟:
104、s4.1.反饋方法
105、反饋方式:采用觸覺反饋,通過振動手環提供觸覺提示。
106、反饋觸發條件:
107、當t≥tstart-δtprompt時,觸發反饋
108、其中,δtprompt為提示提前量,考慮系統處理延遲和運動員反應時間。
109、s4.2誤差校正與調整
110、實時監控:監測運動員的實際蹬腿時刻,與最佳時機進行比較。
111、誤差反饋:提供誤差信息,幫助運動員調整動作時機。
112、系統自適應:根據誤差情況,動態調整提示提前量δtprompt。
113、系統使用步驟:
114、系統的使用步驟分為離線工作s5和在線工作s6兩個階段。
115、s5離線工作:數據定制與準備,目的是進行數據定制與標定,獲取運動員的個性化動作參數,包含以下步驟:
116、a)準備工作:
117、運動員佩戴腳底壓力傳感器。
118、在球拍上安裝紅外線標記點。
119、確保攝像系統和傳感器設備連接正常。
120、b)無球練習:
121、讓運動員在沒有球的情況下,做出高遠球擊球動作10次。
122、動作識別模塊記錄每次動作的數據。
123、c)數據處理:
124、計算每次從蹬腿動作開始到球拍拍頭到達最高點的時間tswing。
125、記錄球拍在最高點時的高度hracket。
126、d)個性化參數確定:
127、對多次試驗的數據進行統計,計算平均值,得到個性化動作參數tswing和hracket。
128、s6在線工作,進行實時訓練與反饋,在實際訓練中,實時跟蹤羽毛球和運動員的動作,提供及時的反饋,幫助運動員掌握正確的擊球時機。
129、步驟包括:
130、a)開始訓練:
131、系統進入實時監測模式。
132、運動員開始正常的高遠球訓練。
133、b)羽毛球跟蹤:
134、羽毛球跟蹤模塊實時獲取羽毛球的位置信息、下落速度和距離地面的高度。
135、c)時序計算:
136、時序計算模塊根據實時數據,計算蹬腿啟動的最佳時機tstart。
137、d)反饋提示:
138、反饋模塊在合適的時間通過振動手環向運動員發出提示,指導其啟動蹬腿動作。
139、e)動作執行:
140、運動員根據提示,啟動蹬腿和揮拍動作,完成擊球。
141、f)誤差校正:
142、系統記錄實際的蹬腿時刻,與最佳時機進行比較,提供反饋,幫助運動員調整動作。
143、與現有技術相比,本發明的有益效果為:
144、1)、優化擊球時機,提升訓練效果該系統通過準確計算羽毛球的下落軌跡和擊球時機,實時提示運動員最佳的蹬腿啟動時機。通過科學、精準的時序計算,能夠幫助運動員在訓練中掌握高遠球擊打的最佳時機,從而提高擊球的準確性和效果。
145、2)、實時反饋與個性化訓練,系統在運動員訓練過程中提供即時的觸覺反饋(如振動手環),指導運動員在合適的時機啟動蹬腿動作,避免過早或過晚啟動,確保與羽毛球下落同步。這種實時反饋為運動員提供個性化訓練方案,提升訓練效率。
146、3)、減少運動員誤差,提高技術水平本系統能夠通過動作識別與時序計算準確預判羽毛球到達擊球點的時間,避免運動員因不準確的時機判斷而導致擊球失誤。通過反復訓練,運動員可以在實際比賽中更好地控制擊球時機,提升羽毛球技術水平。
147、4)、數據定制與個性化標定,系統在初期訓練過程中通過動作識別模塊進行數據定制與標定,根據每個運動員的擊球動作特征量身定制適合的訓練方案,保證每個運動員都能在最合適的時機啟動蹬腿動作,優化個人技術。
148、5)、智能化與自動化訓練輔助,系統結合動作捕捉技術、機器學習與實時數據分析,為運動員提供高度智能化的訓練輔助。無需過多依賴教練員進行現場指導,運動員可以通過該系統自主進行高效訓練,極大提高訓練的自動化水平。
149、6)、適用于初學者運動員,本系統尤其適用于初學者,能夠幫助初學者盡早掌握擊球時機,避免因為時機不對導致的動作錯誤。
- 還沒有人留言評論。精彩留言會獲得點贊!