自動裝載系統的制作方法
本發明涉及用于讓工程機械自動地將搬運物裝載到搬運車的自動裝載系統。
背景技術:
1、例如在專利文獻1等中記載有以往的自動裝載系統。根據該文獻所記載的技術,在檢測到搬運車接近工程機械時,控制工程機械的控制器將模式設為使工程機械動作的裝載模式,以對搬運車進行裝載(參照該文獻的權利要求1)。
2、根據該文獻所記載的技術,即使不是適于工程機械對搬運車進行裝載的狀態,如果例如誤檢測到搬運車接近,則會進行裝載的控制(裝載控制)。
3、現有技術文獻
4、專利文獻
5、專利文獻1:國際公開第2020/026505號
技術實現思路
1、本發明的目的在于提供一種,如下的自動裝載系統:在開始裝載控制之前,能夠創造出讓控制器以外的判斷主體判斷是否為能夠開始裝載控制的狀況的余地。
2、自動裝載系統包括工程機械、位置檢測部、控制器、外部系統。所述工程機械進行捕集搬運物的捕集動作、以及將所捕集的所述搬運物裝載到搬運車的釋放動作。所述位置檢測部檢測所述搬運車相對于所述工程機械的位置。所述控制器被搭載于所述工程機械,能夠進行基于所述位置檢測部的檢測結果的裝載控制。所述外部系統能夠配置在所述工程機械的外部,并且能夠與所述控制器通信。所述裝載控制是讓所述工程機械反復進行包含所述捕集動作和所述釋放動作的一系列的動作的控制。所述外部系統能夠輸出用于使所述裝載控制開始的裝載控制開始信號。所述控制器以從所述外部系統對所述控制器輸入了所述裝載控制開始信號作為條件,而開始所述裝載控制。
技術特征:
1.一種工程機械,其特征在于包括:
2.根據權利要求1所述的工程機械,其特征在于還包括:
3.根據權利要求1所述的工程機械,其特征在于,
技術總結
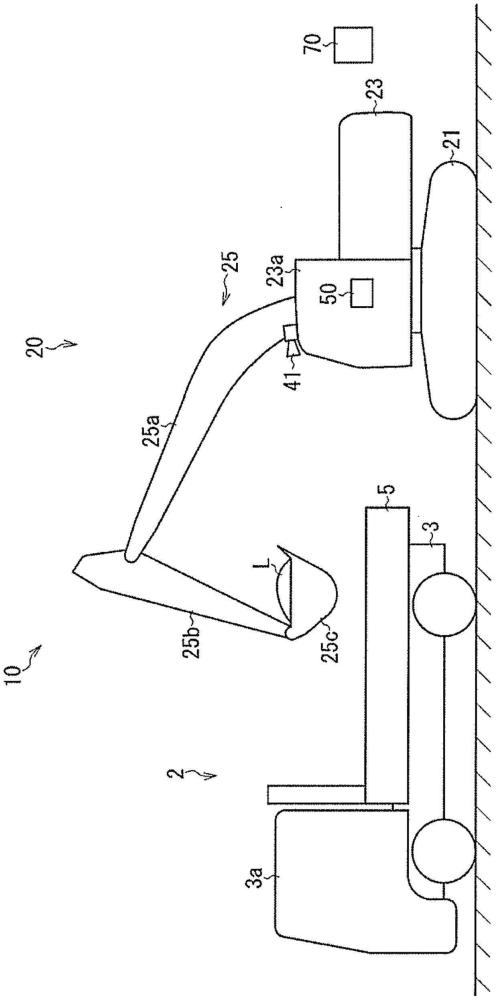
本發明中,控制器(50)被搭載于工程機械(20),并且能夠進行基于位置檢測部(41)的檢測結果的裝載控制。外部系統(70)能夠配置在工程機械(20)的外部,并且能夠與控制器(50)通信。外部系統(70)能夠輸出用于使裝載控制開始的裝載控制開始信號。控制器(50)以從外部系統(70)對控制器(50)輸入了裝載控制開始信號作為條件而開始裝載控制。
技術研發人員:野田大輔
受保護的技術使用者:神鋼建機株式會社
技術研發日:
技術公布日:2025/4/6
相關技術
網友詢問留言
已有0條留言
- 還沒有人留言評論。精彩留言會獲得點贊!
1