一種用于機器人自適應層抓手的制作方法
本發明涉及機器人,具體為一種用于機器人自適應層抓手。
背景技術:
1、在機器代替人工背景下,機器人在自動化過程中尤其重要,因為其柔性強、精度高且穩定。隨著技術日益成熟,提高精度和提升穩定性,作為直接和物體接觸的抓手直接影響到機器人使用,在效率和精度方面更是起到致關重要的作用,本發明就是基于市場需求,研發伺服控制層抓手。
2、市場上多數場景是雙抓或單抓,這樣一層需要2到3次、甚至更多次,這樣在時間上需要較長。在放置時還存在物料包裝物變形或放置時產生偏移,造成垛型變形或傾斜,隨堆放高度增加,其表現更加明顯,給后續運輸等增加占用空間,嚴重時還存在安全隱患。需要解決這些問題的層抓手的研究實施的重要性和價值就顯而易見。
技術實現思路
1、針對現有技術的不足,本發明提供了一種用于機器人自適應層抓手,解決了目前其他抓手使用過程存在弊端,無法高效滿足市場碼垛需求的問題。
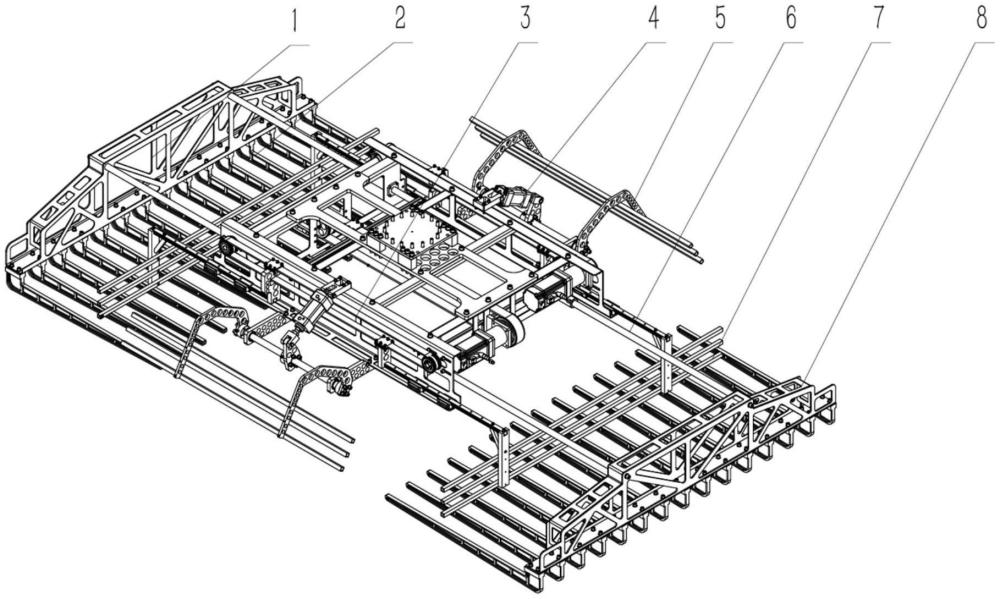
2、為實現以上目的,本發明通過以下技術方案予以實現:一種用于機器人自適應層抓手,包括抓手機器人連接板,所述抓手機器人連接板的底部通過螺釘固定連接有抓手機架,所述抓手機架上固定連接有抓齒伸縮桿,所述抓齒伸縮桿上設置有左側抓齒固定梁和右側抓齒固定橫梁,所述抓手機架上固定連接有抓齒伸縮伺服,所述抓手機架上固定連接有測壓伺服,所述抓手機架上滑動連接有側面夾緊支架,所述側面夾緊支架上固定連接有側擋桿,所述抓手機架的外側鉸接有前后壓緊桿,所述抓手機架的頂部鉸接有氣缸,所述抓齒的下方放置有物料。
3、優選的,所述抓手機器人連接板的頂部與機器人末端法蘭通過螺釘固定連接。
4、優選的,所述抓齒伸縮桿設置有兩組,兩組所述抓齒伸縮桿呈對稱設置。
5、優選的,一組所述抓齒伸縮桿的輸出端固定連接有左側抓齒固定梁,另一組所述所述抓齒伸縮桿的輸出端固定連接有右側抓齒固定橫梁。
6、優選的,所述左側抓齒固定梁和右側抓齒固定橫梁的下方均固定連接有抓齒。
7、優選的,所述抓齒伸縮伺服通過抓齒伸縮同步帶對抓齒伸縮桿進行控制和驅動。
8、優選的,所述測壓伺服通過側壓桿伸縮同步帶與側面夾緊支架驅動連接。
9、優選的,所述氣缸的輸出端與前后壓緊桿的頂部鉸接。
10、工作原理:
11、s1.裝置安裝階段:
12、需要通過工作人員將抓手機器人連接板與機器人末端法蘭通過螺釘鎖緊,使抓手與機器人建立穩固連接,確保機器人能夠精確控制抓手的運動,并將抓手機器人連接板與抓手機架通過螺釘固定,為抓手內部各組件提供支撐結構,使各部件能夠協同工作;
13、s2.抓取準備階段:
14、通過工作人員控制前后壓緊氣缸回程,帶動前后壓緊擋桿上抬,為后續物料進入抓手留出空間,同時解除之前可能存在的前后方向夾緊狀態;
15、同時抓齒伺服驅動抓齒伸縮同步帶,進而使抓齒伸縮桿移動。抓齒伸縮桿上的左側抓齒固定梁隨左側伸縮桿向左移動,右側抓齒固定梁隨右側伸縮桿向右移動,抓齒迅速張開,準備接收物料;
16、并通過伺服電機驅動對稱的兩根側壓桿伸縮同步帶,帶動側面夾緊支架移動,安裝在側面夾緊支架上的側擋桿也隨之動作,移動到最外側,為物料進入提供足夠空間;
17、s3.物料抓取階段:
18、機器人將抓手移動到抓取位,使抓手處于能夠準確抓取物料的位置;
19、再通過對稱的兩個氣缸推動前后壓緊桿,將物料在前后方向壓緊,完成前后方向的整形并夾緊,確保物料在該方向上的規整性;
20、并驅動伺服電機反轉,通過側壓桿伸縮同步帶將左右側抓齒固定梁拉回,使側擋桿對物料進行左右方向的夾緊整形,完成左右側物料的整形并夾緊;
21、最后驅動抓齒伺服再次工作,驅動抓齒伸縮同步帶,使右側伸縮桿上的右側抓齒固定梁和左側伸縮桿上的左側抓齒固定梁在兩側同步帶牽引下向內側移動,抓齒逐漸靠近物料并最終完成抓取動作;
22、s4.自適應調整與碼垛:
23、兩個伺服(抓齒伺服和伺服電機)可根據物料尺寸進行調整。當物料尺寸發生變化時,通過相應的控制程序,伺服能夠改變抓齒的開合程度以及側擋桿的夾緊位置,實現自適應規格調整;
24、s5.放置物料階段:
25、當需要放置物料時,抓齒伺服驅動抓齒伸縮同步帶,使抓齒向外移動,松開對物料的抓取;
26、在通過前后壓緊氣缸回程,帶動前后壓緊擋桿上抬,解除前后方向的夾緊;
27、最后控制伺服電機驅動側壓桿伸縮同步帶,使側擋桿向外移動,松開對物料的橫向夾緊;實現機器人將抓手移動到指定放置位置,完成物料的放置操作。
28、本發明提供了一種用于機器人自適應層抓手。具備以下有益效果:
29、1、本發明利用伺服電機和氣缸組合,實現物料快速整形與一次性抓取,大幅縮短抓取時間,顯著提升工作效率,有效解決傳統抓取方式耗時久的問題。
30、2、本發明通過抓齒伺服精準控制抓齒,配合氣缸對物料多方向整形夾緊,提高碼垛精度,降低垛型偏差,減少空間浪費和安全隱患,有力保障碼垛質量。
31、3、本發明通過兩個伺服能依據物料尺寸實時調整抓齒與側擋桿,快速適應不同規格物料,無需人工頻繁干預,提高系統通用性和靈活性,降低成本,增強了整體的自適應能力。
技術特征:
1.一種用于機器人自適應層抓手,其特征在于,包括抓手機器人連接板(9),所述抓手機器人連接板(9)的底部通過螺釘固定連接有抓手機架(15),所述抓手機架(15)上固定連接有抓齒伸縮桿(6),所述抓齒伸縮桿(6)上設置有左側抓齒固定梁(1)和右側抓齒固定橫梁(8),所述抓手機架(15)上固定連接有抓齒伸縮伺服(12),所述抓手機架(15)上固定連接有測壓伺服(14),所述抓手機架(15)上滑動連接有側面夾緊支架(11),所述側面夾緊支架(11)上固定連接有側擋桿(7),所述抓手機架(15)的外側鉸接有前后壓緊桿(5),所述抓手機架(15)的頂部鉸接有氣缸(4),所述抓齒(2)的下方放置有物料(10)。
2.根據權利要求1所述的一種用于機器人自適應層抓手,其特征在于,所述抓手機器人連接板(9)的頂部與機器人末端法蘭通過螺釘固定連接。
3.根據權利要求1所述的一種用于機器人自適應層抓手,其特征在于,所述抓齒伸縮桿(6)設置有兩組,兩組所述抓齒伸縮桿(6)呈對稱設置。
4.根據權利要求1所述的一種用于機器人自適應層抓手,其特征在于,一組所述抓齒伸縮桿(6)的輸出端固定連接有左側抓齒固定梁(1),另一組所述所述抓齒伸縮桿(6)的輸出端固定連接有右側抓齒固定橫梁(8)。
5.根據權利要求1所述的一種用于機器人自適應層抓手,其特征在于,所述左側抓齒固定梁(1)和右側抓齒固定橫梁(8)的下方均固定連接有抓齒(2)。
6.根據權利要求1所述的一種用于機器人自適應層抓手,其特征在于,所述抓齒伸縮伺服(12)通過抓齒伸縮同步帶(13)對抓齒伸縮桿(6)進行控制和驅動。
7.根據權利要求1所述的一種用于機器人自適應層抓手,其特征在于,所述測壓伺服(14)通過側壓桿伸縮同步帶(3)與側面夾緊支架(11)驅動連接。
8.根據權利要求1所述的一種用于機器人自適應層抓手,其特征在于,所述氣缸(4)的輸出端與前后壓緊桿(5)的頂部鉸接。
技術總結
本申請涉及機器人領域,公開了一種用于機器人自適應層抓手,包括抓手機器人連接板,所述抓手機器人連接板的底部通過螺釘固定連接有抓手機架,所述抓手機架上固定連接有抓齒伸縮桿,所述抓齒伸縮桿上設置有左側抓齒固定梁和右側抓齒固定橫梁,所述抓手機架上固定連接有抓齒伸縮伺服,所述抓手機架上固定連接有測壓伺服,所述抓手機架上滑動連接有側面夾緊支架,所述側面夾緊支架上固定連接有側擋桿,所述抓手機架的外側鉸接有前后壓緊桿,所述抓手機架的頂部鉸接有氣缸,所述抓齒的下方放置有物料。本發明利用伺服電機和氣缸組合,實現物料快速整形與一次性抓取,大幅縮短抓取時間,顯著提升工作效率,有效解決傳統抓取方式耗時久的問題。
技術研發人員:代竟文,王喜成
受保護的技術使用者:廣西特龍控股集團有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!