機器手抓持載荷設置、調整方法及設備與流程
本發明涉及機器手控制領域,具體涉及一種機器手抓持載荷設置、調整方法及設備。
背景技術:
1、機器手可應用于多種產業,目前通常針對一些固定應用場景設計機器手的自動化抓取策略,使其能夠抓起特定的物體。而在一些應用場景中,抓取物可能具有較強的多樣性,如果抓取策略的適應性不足,則導致無法抓起目標物,或在抓取中破壞目標物等。
2、現有的自適應抓取策略是在抓起物體后實時監測物體是否滑動,一旦物體發生滑動則增加載荷直至物體不再滑動。在實際應用時發現該策略適應性不足,一方面是決定增加載荷的時機不合理,即當物體已經發生了滑動后再調整載荷,無法有效制止滑落;另一方面是難以預設載荷的增加速率,過低的增加速率無法避免滑落,而過高的增加速率可能破壞物體。
技術實現思路
1、有鑒于此,本申請提供一種機器手抓持載荷設置方法,包括:
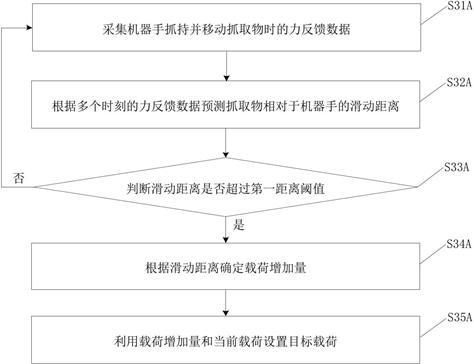
2、采集機器手抓持并移動抓取物時的力反饋數據;
3、根據多個時刻的所述力反饋數據預測抓取物相對于機器手的滑動距離;
4、判斷所述滑動距離是否超過第一距離閾值;
5、當所述滑動距離超過所述第一距離閾值時,根據所述滑動距離確定載荷增加量;
6、利用所述載荷增加量和當前載荷設置目標載荷。
7、可選地,所述力反饋數據包括設置在機器手與抓取物接觸部位的電子皮膚采集到的壓力數據、機器手的各個驅動裝置的驅動力數據。
8、可選地,所述壓力數據為機器手的手掌和多個手指處分別設置的電子皮膚所采集的陣列數據。
9、可選地,根據多個時刻的所述力反饋數據預測抓取物相對于機器手的滑動距離,包括:
10、通過時間序列預測模塊根據多個時刻的所述陣列數據預測下一時刻的壓力特征向量;
11、從所述驅動力數據中提取豎向驅動力分量,通過時間序列預測模塊根據多個時刻的所述豎向驅動力分量下一時刻的驅動力特征向量;
12、聯接所述壓力特征向量和所述驅動力特征向量得到全局特征向量;
13、根據所述全局特征向量得到滑動距離。
14、可選地,判斷所述滑動距離是否超過第一距離閾值,包括:
15、判斷所述滑動距離是否超過第二距離閾值;
16、當所述滑動距離未超過第二距離閾值時,判斷所述滑動距離是否超過第一距離閾值;
17、當所述滑動距離超過第二距離閾值時,使機器手向下移動,將抓取物放回承載平面,準備重新抓持。
18、可選地,利用所述載荷增加量和當前載荷設置目標載荷,包括:
19、計算所述載荷增加量和當前載荷設置的載荷總和;
20、判斷所述載荷總和是否超過載荷上限;
21、當所述載荷總和未超過載荷上限時,將載荷總和設為目標載荷;
22、當所述載荷總和超過載荷上限時,將載荷上限設為目標載荷。
23、本申請還提供一種機器手抓持載荷調整方法,包括:
24、在機器手抓持并移動抓取物的過程中,按照第一周期觸發第一調整操作、按照第二周期觸發第二調整操作,所述第一調整操作包括根據當前時刻的力反饋數據和前一時刻的力反饋數據判斷抓取物是否滑動,當抓取物滑動時增加載荷,所述第二調整操作包括利用上述方法設置目標載荷,并增加載荷直至達到所述目標載荷。
25、可選地,所述第二周期大于所述第一周期。
26、可選地,在觸發第二調整操作后,在當前載荷未達到所述目標載荷之前,暫停觸發所述第一調整操作。
27、可選地,觸發第一調整操作時的載荷增加量為固定量,且所述固定量小于第二調整操作中的載荷增加量。
28、可選地,第一調整操作中的力反饋數據包括設置在機器手與抓取物接觸部位的電子皮膚采集到的壓力數據總和,以及從特定驅動裝置的驅動力數據中提取的豎向分量。
29、可選地,根據當前時刻的力反饋數據和前一時刻的力反饋數據判斷抓取物是否滑動,包括:
30、根據當前時刻和前一時刻的所述壓力數據總和計算總壓力之差,以及根據當前時刻和前一時刻的所述豎向驅動力分量計算豎向分量之差;
31、判斷所述總壓力之差和所述豎向分量之差中的任一個是否超過相應的設定閾值;
32、當所述總壓力之差和所述豎向分量之差中的任一個超過相應的設定閾值時,判定抓取物發生了滑動。
33、相應地,本申請提供一種機器手抓持控制設備,包括:處理器以及與所述處理器連接的存儲器;其中,所述存儲器存儲有可被所述處理器執行的指令,所述指令被所述處理器執行,以使所述處理器執行上述方法。
34、本申請提供的機器手抓持載荷設置方法及設備利用多個時刻的反饋數據預測物體相對于機器手的滑動距離,可以在物體實際發生滑動之前得到適合當前抓取物的目標載荷,從而有效制止滑落趨勢,并且本方案基于預測的滑動距離大小設置載荷增量,使得目標載荷的大小合理,在制止滑落的同時避免破壞物體。
35、根據本申請提供的機器手抓持載荷調整方法及設備,采用兩種不同的調整操作調整機器手載荷,通過其中響應速度較快的第一調整操作,確保在抓取物發生滑動事件時及時增加載荷,通過其中準確性較高的第二調整操作,預判滑動距離并設置合適的目標載荷,從而制止滑落趨勢,本方案兼顧響應速度和準確性,提高了機器手抓持物體的適應性。
技術特征:
1.一種機器手抓持載荷設置方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,所述力反饋數據包括設置在機器手與抓取物接觸部位的電子皮膚采集到的壓力數據、機器手的各個驅動裝置的驅動力數據。
3.據權利要求2所述的方法,其特征在于,所述壓力數據為機器手的手掌和多個手指處分別設置的電子皮膚所采集的陣列數據。
4.據權利要求3所述的方法,其特征在于,根據多個時刻的所述力反饋數據預測抓取物相對于機器手的滑動距離,包括:
5.據權利要求1所述的方法,其特征在于,判斷所述滑動距離是否超過第一距離閾值,包括:
6.據權利要求1所述的方法,其特征在于,利用所述載荷增加量和當前載荷設置目標載荷,包括:
7.一種機器手抓持載荷調整方法,其特征在于,包括:
8.據權利要求7所述的方法,其特征在于,所述第二周期大于所述第一周期。
9.據權利要求8所述的方法,其特征在于,在觸發第二調整操作后,在當前載荷未達到所述目標載荷之前,暫停觸發所述第一調整操作。
10.根據權利要求7所述的方法,其特征在于,觸發第一調整操作時的載荷增加量為固定量,且所述固定量小于第二調整操作中的載荷增加量。
11.根據權利要求7所述的方法,其特征在于,第一調整操作中的力反饋數據包括設置在機器手與抓取物接觸部位的電子皮膚采集到的壓力數據總和,以及從特定驅動裝置的驅動力數據中提取的豎向分量。
12.根據權利要求11所述的方法,其特征在于,根據當前時刻的力反饋數據和前一時刻的力反饋數據判斷抓取物是否滑動,包括:
13.一種機器手抓持控制設備,其特征在于,包括:處理器以及與所述處理器連接的存儲器;其中,所述存儲器存儲有可被所述處理器執行的指令,所述指令被所述處理器執行,以使所述處理器執行如權利要求1-12中任意一項所述的方法。
技術總結
本發明提供一種機器手抓持載荷設置、調整方法及設備,其中設置方法包括:采集機器手抓持并移動抓取物時的力反饋數據;根據多個時刻的所述力反饋數據預測抓取物相對于機器手的滑動距離;判斷所述滑動距離是否超過第一距離閾值;當所述滑動距離超過所述第一距離閾值時,根據所述滑動距離確定載荷增加量;利用所述載荷增加量和當前載荷設置目標載荷。
技術研發人員:賴建誠,尹源,董智,韓飛,張金豪
受保護的技術使用者:途見科技(北京)有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!