一種帶視觸覺傳感器的機械手套、操作方法及控制系統與流程
本發明涉及機器人,特別涉及一種帶視觸覺傳感器的機械手套、操作方法及控制系統。
背景技術:
1、為了更好更方便的控制五指機械手,市場上出現了機器人控制手套,操作員只需戴上手套并通過手指活動即可控制五指機械手,這種機器人控制手套中的傳感控制原理以光學傳感為主,其捕捉位置信息精準,用戶使用體驗好;
2、現有的機器人控制手套自由度少、功能單一,用戶體驗感差。
技術實現思路
1、有鑒于此,本發明提出了一種帶視觸覺傳感器的機械手套、操作方法及控制系統,具體方案如下:
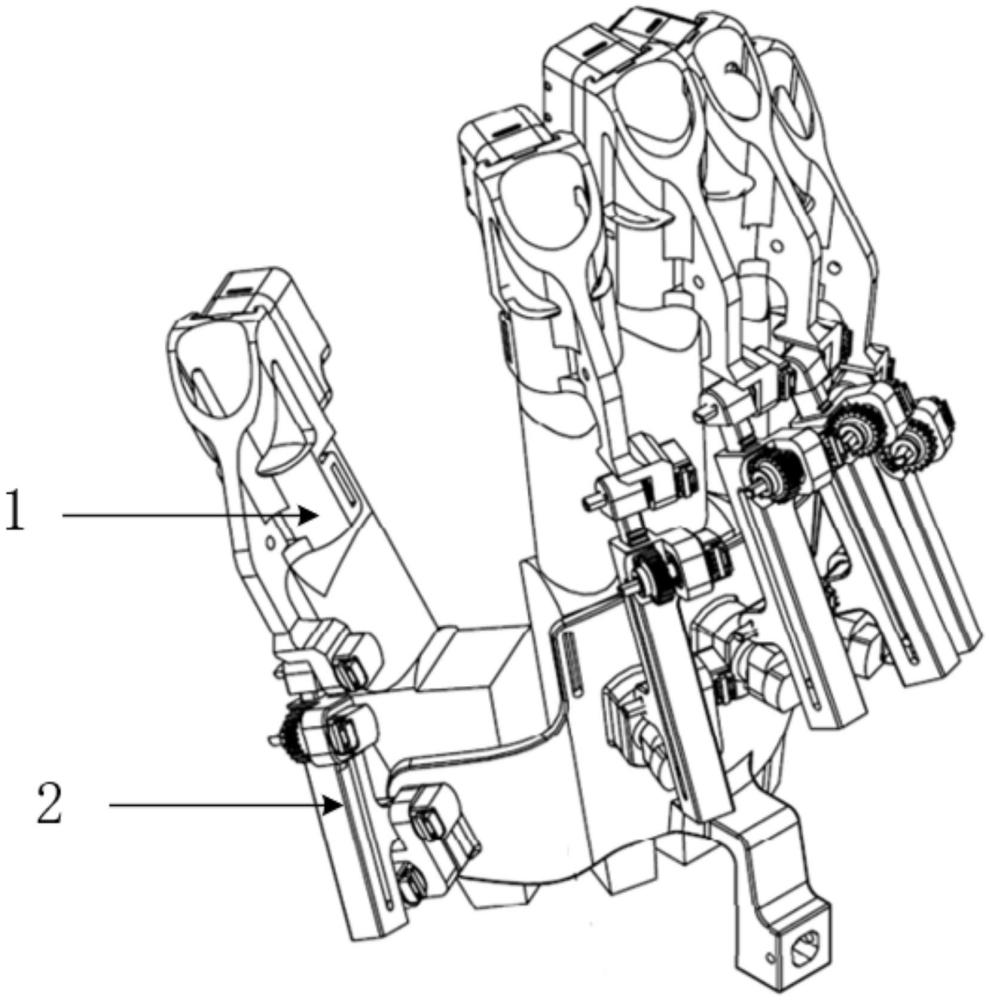
2、第一部分,本發明提供了一種帶視觸覺傳感器的機械手套,包括:至少一個手指組件;
3、所述手指組件包括分別對應用戶手指不同部位的至少兩個結構件;
4、至少一個所述手指組件上包括用于收集至少一個所述結構件上活動信息的信息收集模組;
5、至少一所述手指組件上對應用戶指尖的結構件上設置有視觸覺傳感器。
6、在一個具體實施例中,所述結構件包括指尖結構件、旋轉結構件、伸縮結構件和擺動結構件;所述旋轉結構件一端連接所述指尖結構件,另一端活動連接所述擺動結構件;所述伸縮結構件位于所述旋轉結構件上;所述指尖結構件上設置有所述視觸覺傳感器;
7、所述信息收集模組包括用于收集所述旋轉結構件運動信息的旋轉信息收集器、用于收集所述擺動結構件運動信息的擺動信息收集器以及用于收集所述伸縮結構件運動信息的伸縮信息收集器。
8、在一個具體實施例中,所述旋轉結構件包括第一搖臂和第二搖臂;所述第一搖臂一端連接所述指尖結構件,另一端活動連接所述第二搖臂,以在外力作用下帶動所述指尖結構件相對所述第二搖臂彎曲或伸直;所述第二搖臂遠離所述第一搖臂的一端活動連接所述擺動結構件,所述伸縮結構件位于所述第一搖臂和所述第二搖臂之間;
9、所述旋轉信息收集器包括用于獲取所述第一搖臂運動信息的第一旋轉信息收集器以及用于獲取所述第二搖臂運動信息的第二旋轉信息收集器。
10、在一個具體實施例中,所述伸縮結構件包括齒輪和齒條;所述齒條一端連接所述第一搖臂,另一端活動連接所述第二搖臂,所述齒輪設置于所述第二搖臂上并嚙合連接所述齒條。
11、在一個具體實施例中,所述視觸覺傳感器包括殼體、拍攝組件、照明組件和觸摸層,所述殼體上設置有透明部,所述觸摸層與所述透明部遠離所述殼體的一側連接;
12、所述拍攝組件設置于所述殼體內,且所述拍攝組件的拍攝端朝向所述透明部;所述殼體內形成有照明空間,所述照明組件設置于所述殼體內,所述照明組件用于為所述照明空間及所述觸摸層照明。
13、在一個具體實施例中,所述觸摸層沿自所述拍攝組件到所述透明部的方向依次包括彈性透明層、圖案層、背景層和耐磨層;所述圖案層上包括一個或多個特定圖案,所述背景層和所述耐磨層用于遮光;所述觸摸層用于當所述耐磨層接觸到物體時,使得所述圖案層上的一個或多個所述特定圖案變形,從而使得所述拍攝組件通過所述彈性透明層捕捉所述圖案層上特定圖案的變化,并根據所述變化得到觸摸信息。
14、在一個具體實施例中,所述殼體包括上蓋和下蓋,所述上蓋與所述下蓋可拆卸連接;所述透明部與所述下蓋遠離所述上蓋的一側連接;所述拍攝組件設置于所述上蓋中,所述照明組件設置于所述下蓋中;
15、所述下蓋上開設有開口,以使所述拍攝組件的拍攝端通過所述開口貫穿所述透明部以拍攝所述觸摸層,并使所述照明組件通過所述開口貫穿所述透明部以照明所述觸摸層。
16、在一個具體實施例中,還包括底座;所述手指組件遠離所述視觸覺傳感器的一端設置有所述底座,用于將所述機械手套與外界連接。
17、第二部分,本發明提供了一種帶視觸覺傳感器的機械手套的操作方法,應用于上述技術方案所提及的一種帶視觸覺傳感器的機械手套,所述方法包括:
18、將所述機械手套穿戴于所述用戶的手指上;
19、通過所述信息收集模組獲取用戶手指的運動數據;
20、通過所述視觸覺傳感器獲取用戶指尖的觸摸信息數據;
21、對所述運動數據和/或所述觸摸信息數據進行學習分析,以得到用于其他機器人的學習訓練數據。
22、第三部分,本發明提供了一種機器人控制系統,包括上述技術方案所提及的一種帶視觸覺傳感器的機械手套。
23、有益效果:
24、本發明通過在機械手套中的每個手指組件中設置至少兩個結構件,使得機械手套可以實現多個自由度的活動,靈活性強,以確保手套的靈活性和舒適度;并在手指組件上集成用于收集數據的信息收集模組,使得能夠高效捕捉并記錄結構件的活動信息,以為用戶提供詳盡的手指動作分析報告或用于控制外部設備。進一步地,為了增強觸覺反饋,在對應用戶指尖的結構件上設置視觸覺傳感器,能夠靈敏感知外界觸摸、壓力變化等,為需要精細操作或觸覺反饋的應用場景提供了技術支持。
技術特征:
1.一種帶視觸覺傳感器的機械手套,其特征在于,包括:至少一個手指組件;
2.如權利要求1所述的帶視觸覺傳感器的機械手套,其特征在于,所述結構件包括指尖結構件、旋轉結構件、伸縮結構件和擺動結構件;所述旋轉結構件一端連接所述指尖結構件,另一端活動連接所述擺動結構件;所述伸縮結構件位于所述旋轉結構件上;所述指尖結構件上設置有所述視觸覺傳感器;
3.如權利要求2所述的帶視觸覺傳感器的機械手套,其特征在于,所述旋轉結構件包括第一搖臂和第二搖臂;所述第一搖臂一端連接所述指尖結構件,另一端活動連接所述第二搖臂,以在外力作用下帶動所述指尖結構件相對所述第二搖臂彎曲或伸直;所述第二搖臂遠離所述第一搖臂的一端活動連接所述擺動結構件,所述伸縮結構件位于所述第一搖臂和所述第二搖臂之間;
4.如權利要求3所述的帶視觸覺傳感器的機械手套,其特征在于,所述伸縮結構件包括齒輪和齒條;所述齒條一端連接所述第一搖臂,另一端活動連接所述第二搖臂,所述齒輪設置于所述第二搖臂上并嚙合連接所述齒條。
5.如權利要求1所述的帶視觸覺傳感器的機械手套,其特征在于,所述視觸覺傳感器包括殼體、拍攝組件、照明組件和觸摸層,所述殼體上設置有透明部,所述觸摸層與所述透明部遠離所述殼體的一側連接;
6.如權利要求5所述的帶視觸覺傳感器的機械手套,其特征在于,所述觸摸層沿自所述拍攝組件到所述透明部的方向依次包括彈性透明層、圖案層、背景層和耐磨層;所述圖案層上包括一個或多個特定圖案,所述背景層和所述耐磨層用于遮光;所述觸摸層用于當所述耐磨層接觸到物體時,使得所述圖案層上的一個或多個所述特定圖案變形,從而使得所述拍攝組件通過所述彈性透明層捕捉所述圖案層上特定圖案的變化,并根據所述變化得到觸摸信息。
7.如權利要求5所述的帶視觸覺傳感器的機械手套,其特征在于,所述殼體包括上蓋和下蓋,所述上蓋與所述下蓋可拆卸連接;所述透明部與所述下蓋遠離所述上蓋的一側連接;所述拍攝組件設置于所述上蓋中,所述照明組件設置于所述下蓋中;
8.如權利要求1所述的帶視觸覺傳感器的機械手套,其特征在于,還包括底座;所述手指組件遠離所述視觸覺傳感器的一端設置有所述底座,用于將所述機械手套與外界連接。
9.一種帶視觸覺傳感器的機械手套的操作方法,其特征在于,應用于權利要求1-8任一項所述的一種帶視觸覺傳感器的機械手套,所述方法包括:
10.一種機器人控制系統,其特征在于,包括權利要求1-8任一項所述的一種帶視觸覺傳感器的機械手套。
技術總結
本發明提供了一種帶視觸覺傳感器的機械手套、操作方法及控制系統,包括:至少一個手指組件;所述手指組件包括分別對應用戶手指不同部位的至少兩個結構件;至少一個所述手指組件上包括用于收集至少一個所述結構件上活動信息的信息收集模組;至少一所述手指組件上對應用戶指尖的結構件上設置有視觸覺傳感器。本發明通過在機械手套中的每個手指組件中設置多個結構件,使得機械手套可以實現多個自由度的活動;并在手指組件上集成用于收集數據的信息收集模組,使得能夠高效捕捉并記錄結構件的活動信息。進一步在對應用戶指尖的結構件上設置視觸覺傳感器,能夠靈敏感知外界觸摸、壓力變化等,為需要精細操作或觸覺反饋的應用場景提供了技術支持。
技術研發人員:陳洹枝,陳杰
受保護的技術使用者:戴盟(深圳)機器人科技有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!