基于多傳感器信息融合的仿生機(jī)器人自適應(yīng)運(yùn)動(dòng)控制系統(tǒng)的制作方法
本發(fā)明涉及仿生機(jī)器人,具體為基于多傳感器信息融合的仿生機(jī)器人自適應(yīng)運(yùn)動(dòng)控制系統(tǒng)。
背景技術(shù):
1、“仿生機(jī)器人”是指模仿生物、從事生物特點(diǎn)工作的機(jī)器人,二十一世紀(jì)人類將進(jìn)入老齡化社會(huì),發(fā)展“仿生機(jī)器人”將彌補(bǔ)年輕勞動(dòng)力的嚴(yán)重不足,解決老齡化社會(huì)的家庭服務(wù)和醫(yī)療等社會(huì)問題,并能開辟新的產(chǎn)業(yè),創(chuàng)造新的就業(yè)機(jī)會(huì)。因此,“仿生機(jī)器人”應(yīng)用越來越普及。
2、公告號(hào)為cn112806894b的中國(guó)專利公開了一種玻璃幕墻清潔方法及仿生機(jī)器人,所述清潔方法包括:s1、根據(jù)仿生機(jī)器人的單步清潔面積將待清洗玻璃劃分為若干個(gè)等面積的清潔區(qū)域;s2、確定仿生機(jī)器人的出發(fā)點(diǎn),依次連接所有清潔區(qū)域的中心點(diǎn)形成仿生機(jī)器人的運(yùn)動(dòng)軌跡;s3、將每塊玻璃的第一個(gè)清潔區(qū)域的中心點(diǎn)定義為進(jìn)入點(diǎn);s4、根據(jù)相鄰清潔區(qū)域中心點(diǎn)控制仿生機(jī)器人單步爬行距離,使仿生機(jī)器人根據(jù)運(yùn)動(dòng)軌跡遍歷所有清潔區(qū)域的中心點(diǎn)并對(duì)每個(gè)清潔區(qū)域進(jìn)行清潔;能夠保證對(duì)玻璃進(jìn)行全面、徹底的清潔,提高清潔的效率。但是,該專利存在以下缺陷:
3、現(xiàn)有的技術(shù),不能基于多傳感器信息融合對(duì)仿生機(jī)器人進(jìn)行自適應(yīng)運(yùn)動(dòng)控制,導(dǎo)致仿生機(jī)器人使用效果差。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于提供基于多傳感器信息融合的仿生機(jī)器人自適應(yīng)運(yùn)動(dòng)控制系統(tǒng),可基于多傳感器信息融合對(duì)仿生機(jī)器人進(jìn)行自適應(yīng)運(yùn)動(dòng)控制,可提升仿生機(jī)器人使用效果,解決了上述背景技術(shù)中提出的問題。
2、為實(shí)現(xiàn)上述目的,本發(fā)明提供如下技術(shù)方案:
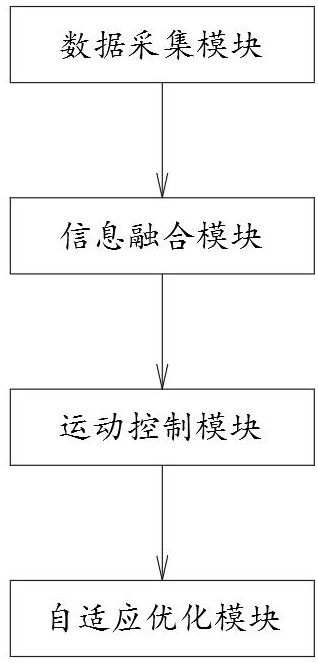
3、基于多傳感器信息融合的仿生機(jī)器人自適應(yīng)運(yùn)動(dòng)控制系統(tǒng),包括:數(shù)據(jù)采集模塊、信息融合模塊、運(yùn)動(dòng)控制模塊及自適應(yīng)優(yōu)化模塊;
4、所述數(shù)據(jù)采集模塊,配置為采集仿生機(jī)器人多模態(tài)數(shù)據(jù);
5、所述信息融合模塊,配置為對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行融合處理,生成仿生機(jī)器人特征數(shù)據(jù);
6、所述運(yùn)動(dòng)控制模塊,配置為構(gòu)建仿生機(jī)器人運(yùn)動(dòng)控制模型,對(duì)仿生機(jī)器人特征數(shù)據(jù)進(jìn)行分析,生成仿生機(jī)器人運(yùn)動(dòng)控制方案;
7、所述自適應(yīng)優(yōu)化模塊,配置為不斷優(yōu)化仿生機(jī)器人運(yùn)動(dòng)控制方案,并對(duì)仿生機(jī)器人進(jìn)行自適應(yīng)運(yùn)動(dòng)控制。
8、優(yōu)選的,采集仿生機(jī)器人多模態(tài)數(shù)據(jù),包括:
9、采用慣性測(cè)量單元對(duì)仿生機(jī)器人的姿態(tài)、加速度和角速度信息進(jìn)行實(shí)時(shí)監(jiān)測(cè)及采集,獲取仿生機(jī)器人的位姿數(shù)據(jù);
10、采用視覺傳感器對(duì)仿生機(jī)器人的周圍環(huán)境信息進(jìn)行實(shí)時(shí)監(jiān)測(cè)及采集,獲取仿生機(jī)器人的環(huán)境數(shù)據(jù);
11、采用gps對(duì)仿生機(jī)器人的位置信息進(jìn)行實(shí)時(shí)監(jiān)測(cè)及采集,獲取仿生機(jī)器人的位置數(shù)據(jù);
12、采用距離傳感器對(duì)仿生機(jī)器人的障礙物距離信息進(jìn)行實(shí)時(shí)監(jiān)測(cè)及采集,獲取仿生機(jī)器人的障礙物距離數(shù)據(jù);
13、采用力傳感器對(duì)仿生機(jī)器人與環(huán)境的接觸力信息進(jìn)行實(shí)時(shí)監(jiān)測(cè)及采集,獲取仿生機(jī)器人的接觸力數(shù)據(jù);
14、采用觸覺傳感器對(duì)仿生機(jī)器人的接觸和壓力分布信息進(jìn)行實(shí)時(shí)監(jiān)測(cè)及采集,獲取仿生機(jī)器人的觸覺數(shù)據(jù);
15、其中,根據(jù)仿生機(jī)器人的位姿數(shù)據(jù)、環(huán)境數(shù)據(jù)、位置數(shù)據(jù)、障礙物距離數(shù)據(jù)、接觸力數(shù)據(jù)及觸覺數(shù)據(jù),確定基于多傳感器的仿生機(jī)器人多模態(tài)數(shù)據(jù)。
16、優(yōu)選的,所述仿生機(jī)器人自適應(yīng)運(yùn)動(dòng)控制系統(tǒng),還包括:
17、實(shí)時(shí)監(jiān)測(cè)仿生機(jī)器人的慣性測(cè)量單元、視覺傳感器、gps、距離傳感器、用力傳感器和觸覺傳感器的單位時(shí)間的電池消耗量;
18、將慣性測(cè)量單元、視覺傳感器、gps、距離傳感器、用力傳感器和觸覺傳感器的每個(gè)單位時(shí)間的電池消耗量獲取慣性測(cè)量單元、視覺傳感器、gps、距離傳感器、用力傳感器和觸覺傳感器對(duì)應(yīng)的已經(jīng)歷的單位時(shí)間對(duì)應(yīng)的耗電波動(dòng)值;其中,所述耗電波動(dòng)值為慣性測(cè)量單元、視覺傳感器、gps、距離傳感器、用力傳感器和觸覺傳感器對(duì)應(yīng)的已經(jīng)歷的單位時(shí)間對(duì)應(yīng)的電池消耗量標(biāo)準(zhǔn)差;
19、提取慣性測(cè)量單元、視覺傳感器、gps、距離傳感器、用力傳感器和觸覺傳感器對(duì)應(yīng)的已經(jīng)歷的單位時(shí)間對(duì)應(yīng)的耗電波動(dòng)值中的耗電波動(dòng)值最大值和耗電波動(dòng)值最小值;
20、將所述耗電波動(dòng)值最大值對(duì)應(yīng)設(shè)備的每個(gè)單位時(shí)間的電池消耗量整合為目標(biāo)電池消耗量數(shù)據(jù)集合;
21、將所述耗電波動(dòng)值最小值對(duì)應(yīng)設(shè)備的每個(gè)單位時(shí)間的電池消耗量整合為觀察電池消耗量數(shù)據(jù)集合;
22、利用所述目標(biāo)電池消耗量數(shù)據(jù)集合和觀察電池消耗量數(shù)據(jù)集合中每個(gè)單位時(shí)間對(duì)應(yīng)的電池消耗量數(shù)據(jù)進(jìn)行比值處理,獲取目標(biāo)電池消耗量數(shù)據(jù)集合和觀察電池消耗量數(shù)據(jù)集合中每個(gè)單位時(shí)間對(duì)應(yīng)的電池消耗量對(duì)應(yīng)的比值參數(shù);
23、利用所述比值參數(shù)結(jié)合當(dāng)前仿生機(jī)器人的剩余用電量判定當(dāng)前是否需要進(jìn)行充電。
24、優(yōu)選的,利用所述比值參數(shù)結(jié)合當(dāng)前仿生機(jī)器人的剩余用電量判定當(dāng)前是否需要進(jìn)行充電,包括:
25、提取所述目標(biāo)電池消耗量數(shù)據(jù)集合和觀察電池消耗量數(shù)據(jù)集合中每個(gè)單位時(shí)間對(duì)應(yīng)的電池消耗量對(duì)應(yīng)的比值參數(shù);
26、提取所述目標(biāo)電池消耗量數(shù)據(jù)集合對(duì)應(yīng)的耗電波動(dòng)值;
27、提取所述觀察電池消耗量數(shù)據(jù)集合對(duì)應(yīng)的耗電波動(dòng)值;
28、對(duì)觀察電池消耗量數(shù)據(jù)集合對(duì)應(yīng)的耗電波動(dòng)值和目標(biāo)電池消耗量數(shù)據(jù)集合對(duì)應(yīng)的耗電波動(dòng)值進(jìn)行比值處理,獲取比值參考值;
29、利用所述目標(biāo)電池消耗量數(shù)據(jù)集合和觀察電池消耗量數(shù)據(jù)集合中每個(gè)單位時(shí)間對(duì)應(yīng)的電池消耗量對(duì)應(yīng)的比值參數(shù)和比值參考值結(jié)合當(dāng)前仿生機(jī)器人的剩余用電量獲取仿生機(jī)器人在未來預(yù)設(shè)的時(shí)間段t之后的電池剩余電量預(yù)測(cè)值;
30、其中,所述仿生機(jī)器人在未來預(yù)設(shè)的時(shí)間段t之后的電池剩余電量預(yù)測(cè)值通過如下公式獲取:
31、
32、其中,ep表示仿生機(jī)器人在未來預(yù)設(shè)的時(shí)間段t之后的電池剩余電量預(yù)測(cè)值;ec表示當(dāng)前仿生機(jī)器人的剩余用電量;t表示預(yù)設(shè)的時(shí)間段;pc表示比值參考值;n表示目標(biāo)電池消耗量數(shù)據(jù)集合和觀察電池消耗量數(shù)據(jù)集合中所包含的數(shù)據(jù)個(gè)數(shù),并且,所述數(shù)據(jù)個(gè)數(shù)與已經(jīng)歷的單位時(shí)間相同;pi表示目標(biāo)電池消耗量數(shù)據(jù)集合和觀察電池消耗量數(shù)據(jù)集合對(duì)應(yīng)的第i個(gè)比值參數(shù)的具體數(shù)值;α表示目標(biāo)電池消耗量數(shù)據(jù)集合的單位時(shí)間平均電能消耗量;β表示觀察電池消耗量數(shù)據(jù)集合的單位時(shí)間平均電能消耗量;
33、將所述仿生機(jī)器人在未來預(yù)設(shè)的時(shí)間段t之后的電池剩余電量預(yù)測(cè)值與預(yù)設(shè)的電池剩余容量閾值進(jìn)行比較;
34、當(dāng)所述仿生機(jī)器人在未來預(yù)設(shè)的時(shí)間段t之后的電池剩余電量預(yù)測(cè)值低于預(yù)設(shè)的電池剩余容量閾值時(shí),則判定需要對(duì)仿生機(jī)器人進(jìn)行充電。
35、優(yōu)選的,對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行融合處理,包括:
36、對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行清洗,識(shí)別仿生機(jī)器人多模態(tài)數(shù)據(jù)中的不一致數(shù)據(jù)、缺失數(shù)據(jù)及異常數(shù)據(jù),并去除仿生機(jī)器人多模態(tài)數(shù)據(jù)中對(duì)仿生機(jī)器人自適應(yīng)運(yùn)動(dòng)控制無用的不一致數(shù)據(jù)、缺失數(shù)據(jù)及異常數(shù)據(jù);
37、對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行轉(zhuǎn)換,使仿生機(jī)器人多模態(tài)數(shù)據(jù)統(tǒng)一化,去除仿生機(jī)器人多模態(tài)數(shù)據(jù)之間的量綱差異,確定標(biāo)準(zhǔn)化的仿生機(jī)器人多模態(tài)數(shù)據(jù)。
38、優(yōu)選的,對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行融合處理,還包括:
39、基于卡爾曼濾波對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行濾波處理,去除仿生機(jī)器人多模態(tài)數(shù)據(jù)中的噪聲,并評(píng)估仿生機(jī)器人運(yùn)動(dòng)狀態(tài);
40、基于深度學(xué)習(xí)技術(shù),采用神經(jīng)網(wǎng)絡(luò)對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行融合,自動(dòng)學(xué)習(xí)不同傳感器數(shù)據(jù)之間的復(fù)雜關(guān)系,使仿生機(jī)器人多模態(tài)數(shù)據(jù)在時(shí)間和空間上具備一致性;
41、對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行特征提取,從仿生機(jī)器人多模態(tài)數(shù)據(jù)中提取與仿生機(jī)器人自適應(yīng)運(yùn)動(dòng)控制相關(guān)的特征向量,并對(duì)提取的特征向量進(jìn)行加權(quán)融合,確定基于多傳感器信息融合的仿生機(jī)器人特征數(shù)據(jù)。
42、優(yōu)選的,構(gòu)建仿生機(jī)器人運(yùn)動(dòng)控制模型,包括:
43、收集仿生機(jī)器人歷史數(shù)據(jù),并對(duì)收集的仿生機(jī)器人歷史數(shù)據(jù)進(jìn)行劃分,將仿生機(jī)器人歷史數(shù)據(jù)劃分為訓(xùn)練集及測(cè)試集;
44、基于機(jī)器學(xué)習(xí)技術(shù),采用訓(xùn)練集對(duì)機(jī)器學(xué)習(xí)模型進(jìn)行訓(xùn)練,使機(jī)器學(xué)習(xí)模型自主學(xué)習(xí)仿生機(jī)器人運(yùn)動(dòng)控制行為,并對(duì)仿生機(jī)器人進(jìn)行運(yùn)動(dòng)控制,確定仿生機(jī)器人運(yùn)動(dòng)控制模型;
45、基于測(cè)試集對(duì)仿生機(jī)器人運(yùn)動(dòng)控制模型進(jìn)行性能測(cè)試,根據(jù)準(zhǔn)確率、召回率及f1分?jǐn)?shù)評(píng)估仿生機(jī)器人運(yùn)動(dòng)控制模型是否能達(dá)到預(yù)期效果;
46、根據(jù)測(cè)試評(píng)估結(jié)果,對(duì)仿生機(jī)器人運(yùn)動(dòng)控制模型的參數(shù)進(jìn)行調(diào)整,并對(duì)仿生機(jī)器人運(yùn)動(dòng)控制模型進(jìn)行不斷地迭代優(yōu)化,確定最佳的仿生機(jī)器人運(yùn)動(dòng)控制模型。
47、優(yōu)選的,對(duì)仿生機(jī)器人特征數(shù)據(jù)進(jìn)行分析,包括:
48、獲取最佳的仿生機(jī)器人運(yùn)動(dòng)控制模型,并將最佳的仿生機(jī)器人運(yùn)動(dòng)控制模型部署于實(shí)際的仿生機(jī)器人自適應(yīng)運(yùn)動(dòng)控制環(huán)境中;
49、將基于多傳感器信息融合的仿生機(jī)器人特征數(shù)據(jù)輸入到最佳的仿生機(jī)器人運(yùn)動(dòng)控制模型中,根據(jù)最佳的仿生機(jī)器人運(yùn)動(dòng)控制模型對(duì)仿生機(jī)器人特征數(shù)據(jù)進(jìn)行分析,并生成仿生機(jī)器人運(yùn)動(dòng)控制方案,根據(jù)仿生機(jī)器人運(yùn)動(dòng)控制方案驅(qū)動(dòng)仿生機(jī)器人完成運(yùn)動(dòng)動(dòng)作。
50、優(yōu)選的,根據(jù)仿生機(jī)器人運(yùn)動(dòng)控制方案驅(qū)動(dòng)仿生機(jī)器人完成運(yùn)動(dòng)動(dòng)作,包括:
51、生成仿生機(jī)器人步態(tài)信息,使仿生機(jī)器人按照生成的步態(tài)信息進(jìn)行運(yùn)動(dòng),并對(duì)仿生機(jī)器人的平衡進(jìn)行監(jiān)測(cè)控制,使仿生機(jī)器人動(dòng)態(tài)平衡;
52、生成仿生機(jī)器人路徑規(guī)劃信息,使仿生機(jī)器人按照生成的路徑規(guī)劃信息進(jìn)行最優(yōu)路徑的運(yùn)動(dòng),并對(duì)障礙物進(jìn)行自動(dòng)避障。
53、優(yōu)選的,對(duì)仿生機(jī)器人進(jìn)行自適應(yīng)運(yùn)動(dòng)控制,包括:
54、對(duì)仿生機(jī)器人的運(yùn)動(dòng)動(dòng)作進(jìn)行實(shí)時(shí)監(jiān)測(cè),根據(jù)仿生機(jī)器人的監(jiān)測(cè)反饋情況,對(duì)仿生機(jī)器人的運(yùn)動(dòng)動(dòng)作進(jìn)行自適應(yīng)調(diào)整,使仿生機(jī)器人運(yùn)動(dòng)形成閉環(huán)控制,使仿生機(jī)器人在運(yùn)動(dòng)中自主學(xué)習(xí)且不斷地對(duì)運(yùn)動(dòng)控制進(jìn)行優(yōu)化,進(jìn)而對(duì)仿生機(jī)器人進(jìn)行自適應(yīng)運(yùn)動(dòng)控制。
55、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果是:
56、本發(fā)明基于多傳感器采集仿生機(jī)器人多模態(tài)數(shù)據(jù),通過對(duì)仿生機(jī)器人多模態(tài)數(shù)據(jù)進(jìn)行融合處理,生成仿生機(jī)器人特征數(shù)據(jù),通過仿生機(jī)器人運(yùn)動(dòng)控制模型對(duì)仿生機(jī)器人特征數(shù)據(jù)進(jìn)行分析,并生成仿生機(jī)器人運(yùn)動(dòng)控制方案,根據(jù)仿生機(jī)器人運(yùn)動(dòng)控制方案驅(qū)動(dòng)仿生機(jī)器人完成運(yùn)動(dòng)動(dòng)作,并對(duì)仿生機(jī)器人的運(yùn)動(dòng)動(dòng)作進(jìn)行實(shí)時(shí)監(jiān)測(cè),根據(jù)仿生機(jī)器人的監(jiān)測(cè)反饋情況,對(duì)仿生機(jī)器人的運(yùn)動(dòng)動(dòng)作進(jìn)行自適應(yīng)調(diào)整,使仿生機(jī)器人運(yùn)動(dòng)形成閉環(huán)控制,使仿生機(jī)器人在運(yùn)動(dòng)中自主學(xué)習(xí)且不斷地對(duì)運(yùn)動(dòng)控制進(jìn)行優(yōu)化,進(jìn)而對(duì)仿生機(jī)器人進(jìn)行自適應(yīng)運(yùn)動(dòng)控制,可基于多傳感器信息融合對(duì)仿生機(jī)器人進(jìn)行自適應(yīng)運(yùn)動(dòng)控制,可提升仿生機(jī)器人的使用效果。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!