一種適用于復(fù)雜地形的模塊化蛇形機(jī)器人及其控制系統(tǒng)
本發(fā)明屬于仿生機(jī)器人,具體涉及一種適用于復(fù)雜地形的模塊化蛇形機(jī)器人及其控制系統(tǒng)。
背景技術(shù):
1、模塊化蛇形機(jī)器人是仿生學(xué)原理在機(jī)器人技術(shù)中的典型應(yīng)用。蛇類動(dòng)物以其獨(dú)特的無肢運(yùn)動(dòng)方式和高度靈活的身體結(jié)構(gòu),在復(fù)雜環(huán)境中展現(xiàn)出卓越的適應(yīng)能力。通過模仿蛇類的運(yùn)動(dòng)模式和身體構(gòu)造,設(shè)計(jì)出的蛇形機(jī)器人,具有結(jié)構(gòu)合理控制靈活、性能可靠、可擴(kuò)展性強(qiáng)等優(yōu)點(diǎn),在許多領(lǐng)域有著廣泛的應(yīng)用前景,如在地震、塌方及火災(zāi)后的廢墟中尋找傷員、在狹小和危險(xiǎn)環(huán)境中勘測(cè)和疏通管道等。
2、目前蛇形機(jī)器人多采用固定模塊化設(shè)計(jì)或單一運(yùn)動(dòng)模式(如純輪式或純履帶式),難以兼顧復(fù)雜地形的通過性與高速運(yùn)動(dòng)需求。此外,傳統(tǒng)圓柱或矩形機(jī)身設(shè)計(jì)在斜坡移動(dòng)時(shí)穩(wěn)定性不足,在陡坡上易因重力扭矩側(cè)滾,需依賴傳感器和復(fù)雜算法調(diào)整步態(tài),顯著增加控制難度。現(xiàn)有的蛇形機(jī)器人的靈活性和作業(yè)范圍不高,運(yùn)動(dòng)能力受到關(guān)節(jié)個(gè)數(shù)及機(jī)器人長度限制,需要改進(jìn)。
技術(shù)實(shí)現(xiàn)思路
1、為解決上述問題,本發(fā)明公開了一種適用于復(fù)雜地形的模塊化蛇形機(jī)器人及其控制系統(tǒng),可以根據(jù)具體的工作需要改變蛇形機(jī)器人的蛇身模塊組數(shù)量,應(yīng)用輔助機(jī)構(gòu)提升蛇形機(jī)器人在斜坡和復(fù)雜地形中的穩(wěn)定性與運(yùn)動(dòng)效率,結(jié)合了履帶的地形適應(yīng)性與輪式的高速特性,提高運(yùn)動(dòng)的穩(wěn)定性和適應(yīng)性。
2、為達(dá)到上述目的,本發(fā)明的技術(shù)方案如下:
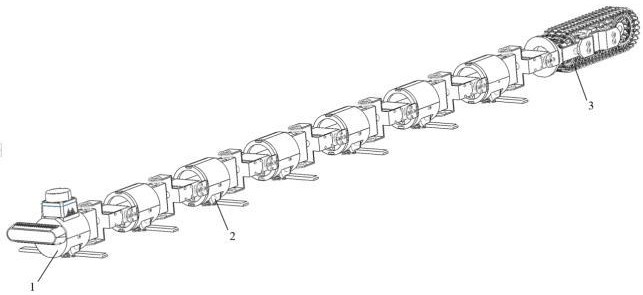
3、一種適用于復(fù)雜地形的模塊化蛇形機(jī)器人,包括蛇頭模塊、蛇尾模塊和多個(gè)蛇身模塊及其控制系統(tǒng);
4、蛇身模塊由軀干單元和關(guān)節(jié)單元組成,關(guān)節(jié)單元采用兩個(gè)雙軸舵機(jī)和十字正交支架結(jié)構(gòu),實(shí)現(xiàn)左右與上下兩個(gè)自由度的運(yùn)動(dòng);軀干單元通過雙軸電機(jī)驅(qū)動(dòng)滾輪使機(jī)器人前進(jìn),軀干單元下方設(shè)有輔助機(jī)構(gòu);蛇頭模塊在蛇身模塊的基礎(chǔ)上進(jìn)一步集成激光雷達(dá)、深度相機(jī)、板載計(jì)算機(jī),通過傳感器感知環(huán)境并進(jìn)行數(shù)據(jù)處理從而控制機(jī)器人運(yùn)動(dòng);蛇尾模塊采用履帶式結(jié)構(gòu),適合復(fù)雜地形的行進(jìn);所述蛇頭模塊、蛇尾模塊和蛇身模塊均與控制系統(tǒng)連接。
5、進(jìn)一步的,軀干單元包括軀干上部外殼、軀干下部外殼、雙軸直流電機(jī)、滾輪、軸端固定套和輔助機(jī)構(gòu);所述軀干上部外殼與軀干下部外殼為半圓形結(jié)構(gòu),軀干上部外殼的下邊緣設(shè)有隔板,軀干上部外殼的前端設(shè)有安裝塊,軀干上部外殼的后端設(shè)有連接板一,軀干下部外殼的后端設(shè)有連接板二,軀干上部外殼兩側(cè)下方設(shè)有卡環(huán)插入軀干下部外殼上方邊緣的凹槽內(nèi),二者通過螺絲連接,兩個(gè)滾輪設(shè)置在雙軸直流電機(jī)的兩端,滾輪外側(cè)通過軸端固定套固定,軀干下部外殼里面中部設(shè)有電機(jī)限位結(jié)構(gòu),所述電機(jī)限位結(jié)構(gòu)的前后端設(shè)有螺絲安裝塊,電機(jī)限位結(jié)構(gòu)的左右兩側(cè)設(shè)有窗口,所述雙軸直流電機(jī)固定在電機(jī)限位結(jié)構(gòu)內(nèi),所述輔助機(jī)構(gòu)包括弧形連接件與延長板,所述弧形連接件設(shè)置在軀干下部外殼的下方,從螺絲安裝塊上通過螺栓連接弧形連接件,弧形連接件上設(shè)有輪縫,兩側(cè)的滾輪伸出窗口與輪縫外,所述延長板與弧形連接件連接在一起且向外延伸,滾輪的最下端低于輔助機(jī)構(gòu)的最下端。
6、進(jìn)一步的,所述電機(jī)限位結(jié)構(gòu)包括一個(gè)電機(jī)平面、兩塊限位板和四個(gè)彈性限位柱,所述電機(jī)平面設(shè)置在軀干下部外殼里面中部,前后設(shè)有兩塊限位板,左右設(shè)有四個(gè)彈性限位柱,所述雙軸直流電機(jī)平放在電機(jī)平面上,前后被兩塊限位板夾住,左右被四個(gè)彈性限位柱夾住,將雙軸直流電機(jī)固定住。
7、進(jìn)一步的,關(guān)節(jié)單元包括雙軸舵機(jī)一、雙軸舵機(jī)二、主舵盤、副舵盤、蛇身連接件、十字正交支架,所述十字正交支架的前端連接雙軸舵機(jī)一的輸出軸,十字正交支架的后端連接雙軸舵機(jī)二,蛇身連接件連接到雙軸舵機(jī)二的輸出軸,蛇身連接件上方設(shè)有安裝槽。
8、進(jìn)一步的,相鄰軀干單元之間通過軀干上部外殼前端的安裝塊和蛇身連接件上的安裝槽進(jìn)行連接,連接板一與連接板二連接雙軸舵機(jī)一,軀干單元和關(guān)節(jié)單元之間通過自攻螺絲連接。
9、進(jìn)一步的,蛇頭模塊包括一個(gè)蛇身模塊以及激光雷達(dá)、板載計(jì)算機(jī)、深度相機(jī)、相機(jī)連接架,所述激光雷達(dá)設(shè)置在軀干單元的上方,板載計(jì)算機(jī)設(shè)置在隔板上方,在軀干單元的前端設(shè)有支架固定端,相機(jī)連接架通過兩個(gè)手?jǐn)Q螺絲與支架固定端連接,深度相機(jī)與相機(jī)連接架相連。
10、進(jìn)一步的,蛇尾模塊是履帶式結(jié)構(gòu),包括蛇尾連接件、履帶支架、固定軸一、履帶、軸端擋圈、單軸直流電機(jī)、固定軸二、齒輪、鏈輪一、鏈輪二和擋板,所述蛇尾連接件與履帶支架相連,蛇尾連接件的前端與前一個(gè)蛇身模塊的雙軸舵機(jī)相連接,履帶支架分別通過固定軸一和固定軸二安裝有鏈輪一和鏈輪二,單軸直流電機(jī)固定在履帶支架上,單軸直流電機(jī)的輸出軸連接齒輪,齒輪與鏈輪二的內(nèi)側(cè)齒輪相嚙合,擋板設(shè)置在履帶支架的外部,履帶與鏈輪一和鏈輪二的外側(cè)齒輪相嚙合。
11、控制系統(tǒng)包括感知融合層、導(dǎo)航規(guī)劃層、通信控制層、運(yùn)動(dòng)執(zhí)行層和電源管理層:
12、感知融合層由深度相機(jī)、激光雷達(dá)、gnss模塊和imu模塊組成,獲取環(huán)境信息與自身位姿信息,進(jìn)行初步的感知融合;
13、導(dǎo)航規(guī)劃層由電腦、板載計(jì)算機(jī)組成,接收感知融合層數(shù)據(jù)進(jìn)行分析與決策,實(shí)現(xiàn)路徑規(guī)劃;
14、通信控制層由藍(lán)牙模塊、語音識(shí)別模塊組成,實(shí)現(xiàn)人機(jī)交互控制;
15、運(yùn)動(dòng)執(zhí)行層由舵機(jī)控制器和若干個(gè)雙軸舵機(jī)組成,接收上位機(jī)和主控制器的指令,通過串行總線發(fā)送命令集,實(shí)現(xiàn)舵機(jī)的運(yùn)動(dòng)執(zhí)行,同時(shí)運(yùn)動(dòng)執(zhí)行層控制雙軸直流電機(jī)和單軸直流電機(jī),驅(qū)動(dòng)主動(dòng)輪和履帶前進(jìn);
16、電源管理層由電源和電源管理模塊組成,為其他四個(gè)層進(jìn)行穩(wěn)定的供電。
17、控制系統(tǒng)采用ubuntu20.04操作系統(tǒng),通過ros1?noetic實(shí)現(xiàn)運(yùn)動(dòng)控制、環(huán)境感知、建圖、路徑規(guī)劃和通信的功能。
18、本發(fā)明的有益效果為:
19、(1)本發(fā)明提供了一種適用于復(fù)雜地形的模塊化蛇形機(jī)器人,?通過連接組件依次串聯(lián)相鄰的蛇身模塊,構(gòu)建出一個(gè)多關(guān)節(jié)的連續(xù)運(yùn)動(dòng)鏈,能夠根據(jù)具體的工作需要增加或減少蛇形機(jī)器人的蛇身模塊組的數(shù)量,增強(qiáng)了機(jī)器人的靈活性和作業(yè)范圍,解決了機(jī)器人的運(yùn)動(dòng)能力受關(guān)節(jié)個(gè)數(shù)及機(jī)器人長度限制的問題,提高了蛇形機(jī)器人的環(huán)境適應(yīng)力。
20、(2)本發(fā)明采用了一種驅(qū)動(dòng)輔助機(jī)構(gòu),該機(jī)構(gòu)可以分散機(jī)器人重量,產(chǎn)生反向扭矩抵消重力導(dǎo)致的側(cè)滾力矩,增大與地面的接觸面積使機(jī)器人在斜坡移動(dòng)時(shí)保持穩(wěn)定,避免面對(duì)陡峭斜坡時(shí)因重力扭矩發(fā)生側(cè)滾現(xiàn)象;在草地、碎石、巖石斜坡等具有細(xì)小障礙物的環(huán)境中,機(jī)構(gòu)可以推擠障礙物輔助機(jī)器人運(yùn)動(dòng)。該機(jī)構(gòu)輕巧簡易,減少機(jī)器人對(duì)復(fù)雜算法和傳感器的依賴,提升控制效率,顯著提升了蛇形機(jī)器人在斜坡和復(fù)雜地形中的穩(wěn)定性與運(yùn)動(dòng)效率。
21、(3)本發(fā)明綜合了輪式蛇形機(jī)器人和履帶式蛇形機(jī)器人的優(yōu)點(diǎn),蛇身采用輪式結(jié)構(gòu),蛇尾采用履帶式結(jié)構(gòu),可以通過拆卸模塊實(shí)現(xiàn)蛇形機(jī)器人的行進(jìn)方式在輪式模式與履帶模式間的切換,以適應(yīng)不同的路面環(huán)境。輪式結(jié)構(gòu)可根據(jù)任務(wù)需求進(jìn)行被動(dòng)輪式與主動(dòng)輪式的切換。輪式和履帶式一起發(fā)揮作用,結(jié)合了履帶的地形適應(yīng)性與輪式的高速特性,提高了蛇形機(jī)器人運(yùn)動(dòng)的穩(wěn)定性和適應(yīng)性。
22、(4)本發(fā)明采用了單關(guān)節(jié)雙自由度的設(shè)計(jì),兩個(gè)正交的雙軸舵機(jī)通過十字正交支架相連,使得單個(gè)關(guān)節(jié)單元能實(shí)現(xiàn)復(fù)合運(yùn)動(dòng),增大了蛇形機(jī)器人的機(jī)動(dòng)性和靈活性
23、(5)本發(fā)明通過激光雷達(dá)、深度相機(jī)、gnss模塊和imu模塊采集蛇形機(jī)器人周圍環(huán)境數(shù)據(jù)和自身姿態(tài)數(shù)據(jù),對(duì)蛇形機(jī)器人進(jìn)行即時(shí)定位與地圖構(gòu)建,實(shí)現(xiàn)組合導(dǎo)航功能。并通過語音模塊與藍(lán)牙通信直接對(duì)機(jī)器人下達(dá)指令,實(shí)現(xiàn)了蛇形機(jī)器人的運(yùn)動(dòng)控制。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!