一種截止閥密封圈自動裝配機械手的制作方法
本發明涉及機械手,具體為一種截止閥密封圈自動裝配機械手。
背景技術:
1、截止閥密封圈自動裝配機械手是一種高度自動化的工業設備,專為提高截止閥生產過程中密封圈的裝配效率與精確度而設計,該機械手集成了精密的機械結構、先進的傳感器技術、以及智能的控制系統,能夠自主完成密封圈的抓取、定位、裝配及質量檢測等一系列操作,從而極大地減輕了人工勞動強度,提升了生產線的整體效能。
2、申請號為cn201410775964.3的專利申請公開了一種磁鐵自動裝配機的裝配機械手,它安裝在磁鐵自動裝配機的上端,并電性連接其控制系統,裝配機械手包括控制板、抓手限位塊、定位銷、抓手固定座、抓手、抓手鉸接銷、氣缸和磁鐵限位塊,抓手固定座上端安裝抓手限位塊,在抓手固定座周側設有多個抓手槽。
3、現有的截止閥密封圈自動裝配機械手在對密封圈進行裝配時,密封圈被機械手進行抓取放置,會出現機械手松開不及時導致密封圈出現二次移動的情況,導致在對密封圈進行按壓完成以后,出現密封圈按壓不平整的現象,從而使密封圈無法正常使用。
技術實現思路
1、針對現有技術的不足,本發明的目的在于提供一種截止閥密封圈自動裝配機械手,以解決上述背景技術中提出的問題。
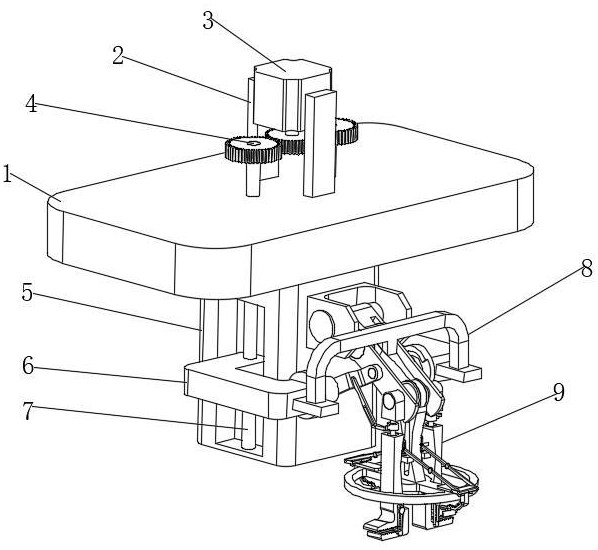
2、為實現上述目的,本發明提供如下技術方案:一種截止閥密封圈自動裝配機械手,包括固定板,所述固定板頂部固定連接有兩組支撐板,兩組所述支撐板相互靠近的一側固定連接有電機,所述電機輸出端嚙合連接有齒輪,所述固定板底部固定連接有定位塊,所述定位塊內壁設置有螺紋桿,所述螺紋桿下兩端與定位塊內壁固定連接,所述螺紋桿上端貫穿定位塊與固定板,所述螺紋桿頂部與齒輪固定連接,所述螺紋桿外壁螺紋連接有滑動塊,還包括:
3、按壓機構,所述按壓機構包括底座,所述底座靠近固定板的一側與定位塊固定連接,所述底座通過轉動軸轉動連接有第一轉動桿,所述第一轉動桿遠離底座的一側通過轉動軸轉動連接有第二轉動桿,所述第二轉動桿遠離第一轉動桿的一側固定連接有按壓環;
4、夾持機構,所述夾持機構包括第三轉動桿,所述第三轉動桿通過轉動軸與底座轉動連接,所述第三轉動桿靠近滑動塊的一側固定連接有彎形桿,所述彎形桿遠離第三轉動桿的一側與滑動塊固定連接
5、根據上述技術方案,所述第一轉動桿頂部固定連接有弧形桿,所述弧形桿靠近滑動塊的一側與其固定連接,所述第二轉動桿內壁固定連接有放置塊。
6、根據上述技術方案,所述放置塊頂部左右兩側均通過軸承轉動連接有接觸塊,兩組所述接觸塊內壁均設置有移動塊,兩組所述移動塊均與接觸塊內壁滑動連接。
7、根據上述技術方案,兩組所述移動塊正反兩側均固定連接有活動桿,四組所述活動桿分別與兩組下壓板固定連接,兩組所述移動塊相互遠離的一側固定連接有接觸桿。
8、根據上述技術方案,所述彎形桿遠離滑動塊的一側固定連接有拉動桿,所述拉動桿遠離彎形桿的一側固定連接有推動環。
9、根據上述技術方案,所述第三轉動桿靠近彎形桿的一側通過轉動桿轉動連接有第一夾具,所述第一夾具連接處設置有旋轉桿,所述旋轉桿與第一夾具的下端固定連接,所述旋轉桿與第一夾具的上端通過軸承轉動連接。
10、根據上述技術方案,所述第一夾具底部內壁固定連接有第一按壓板,所述第一按壓板底部固定連接有彈簧,所述彈簧底部固定連接有第二按壓板,所述第一夾具底部設置有第二夾具,所述第二夾具頂部內壁固定連接有第二按壓板,所述第二夾具遠離滑動塊的一側固定連接有定位環,所述第一夾具遠離滑動塊的一側固定連接有定位柱,所述定位柱與定位環滑動連接,所述接觸桿與第一夾具固定連接,所述夾持機構設置有兩組,均以固定板中部為中心為對稱設置。
11、根據上述技術方案,兩組所述轉動塊底部通過固定軸固定連接有承重桿,兩組所述承重桿內壁均開設有滑槽,兩組所述滑槽槽壁均滑動連接有滑動桿,兩組所述承重桿內壁均設置有推動塊,兩組所述滑動桿貫穿推動塊,且與其固定連接,兩組所述推動塊底部均固定連接有推動板,兩組所述推動塊靠近轉動塊的一側均固定連接有彎折桿,兩組所述彎折桿遠離推動塊的一側與轉動塊固定連接。
12、與現有技術相比,本發明提供了一種截止閥密封圈自動裝配機械手,具備以下有益效果:
13、1、本發明通過設置第一夾具與第二夾具可以在對密封圈進行夾持時,通過第二夾具與第一夾具長度存在差異,使得只能夾持密封圈的邊緣處,且設置第二夾具比第一夾具短還可以再對密封圈進行放置時,通過先移動第一夾具在移動第二夾具可以不對密封圈進行二次觸碰。
14、2、本發明通過設置第一按壓板,可以使得在對密封圈進行按壓時,通過按壓環對第一按壓板進行按壓,第一按壓板受力向下進行移動,帶動彈簧進行收縮,導致第一夾具與第二夾具的間隙變小,從而對密封圈進行進一步的夾持,可以在對密封圈進行放置時進行位置調整。
15、3、本發明通過設置拉動桿,可以在使按壓環在對密封圈進行按壓時,通過拉動桿拉動推動環,使第一夾具與第二夾具進行轉動,第一夾具與第二夾具在從密封圈處移除時通過在次轉動第一夾具與第二夾具達到與第二轉動桿處于水平狀態,使得按壓環在對密封圈進行按壓時,可以不受阻礙的進行下移。
16、4、本發明通過設置滑動桿,在轉動塊向外進行轉動時帶動彎折桿進行同步移動,通過彎折桿拉動推動塊,使推動塊推動滑動桿在滑槽內進行滑動,從而使推動板進行同步同向運動,且推動板在移動過程中可以對密封圈進行扶正的效果。
技術特征:
1.一種截止閥密封圈自動裝配機械手,包括固定板(1),所述固定板(1)頂部固定連接有兩組支撐板(2),兩組所述支撐板(2)相互靠近的一側固定連接有電機(3),所述電機(3)輸出端嚙合連接有齒輪(4),所述固定板(1)底部固定連接有定位塊(5),所述定位塊(5)內壁設置有螺紋桿(7),所述螺紋桿(7)下兩端與定位塊(5)內壁固定連接,所述螺紋桿(7)上端貫穿定位塊(5)與固定板(1),所述螺紋桿(7)頂部與齒輪(4)固定連接,所述螺紋桿(7)外壁螺紋連接有滑動塊(6),其特征在于,還包括:
2.根據權利要求1所述的一種截止閥密封圈自動裝配機械手,其特征在于:所述第一轉動桿(802)頂部固定連接有弧形桿(803),所述弧形桿(803)靠近滑動塊(6)的一側與其固定連接,所述第二轉動桿(804)內壁固定連接有放置塊(806)。
3.根據權利要求2所述的一種截止閥密封圈自動裝配機械手,其特征在于:所述放置塊(806)頂部左右兩側均通過軸承轉動連接有接觸塊(809),兩組所述接觸塊(809)內壁均設置有移動塊(808),兩組所述移動塊(808)均與接觸塊(809)內壁滑動連接。
4.根據權利要求3所述的一種截止閥密封圈自動裝配機械手,其特征在于:兩組所述移動塊(808)正反兩側均固定連接有活動桿(807),四組所述活動桿(807)分別與兩組下壓板(1002)固定連接,兩組所述移動塊(808)相互遠離的一側固定連接有接觸桿(810)。
5.根據權利要求4所述的一種截止閥密封圈自動裝配機械手,其特征在于:所述彎形桿(902)遠離滑動塊(6)的一側固定連接有拉動桿(903),所述拉動桿(903)遠離彎形桿(902)的一側固定連接有推動環(904)。
6.根據權利要求5所述的一種截止閥密封圈自動裝配機械手,其特征在于:所述第三轉動桿(901)靠近彎形桿(902)的一側通過轉動桿轉動連接有第一夾具(906),所述第一夾具(906)連接處設置有旋轉桿(905),所述旋轉桿(905)與第一夾具(906)的下端固定連接,所述旋轉桿(905)與第一夾具(906)的上端通過軸承轉動連接。
7.根據權利要求6所述的一種截止閥密封圈自動裝配機械手,其特征在于:所述第一夾具(906)底部內壁固定連接有第一按壓板(908),所述第一按壓板(908)底部固定連接有彈簧(909),所述彈簧(909)底部固定連接有第二按壓板(910),所述第一夾具(906)底部設置有第二夾具(907),所述第二夾具(907)頂部內壁固定連接有第二按壓板(910),所述第二夾具(907)遠離滑動塊(6)的一側固定連接有定位環(911),所述第一夾具(906)遠離滑動塊(6)的一側固定連接有定位柱(912),所述定位柱(912)與定位環(911)滑動連接,所述接觸桿(810)與第一夾具(906)固定連接,所述夾持機構(9)設置有兩組,均以固定板(1)中部為中心為對稱設置。
8.根據權利要求1所述的一種截止閥密封圈自動裝配機械手,其特征在于:兩組所述轉動塊(1003)底部通過固定軸固定連接有承重桿(1007),兩組所述承重桿(1007)內壁均開設有滑槽(1005),兩組所述滑槽(1005)槽壁均滑動連接有滑動桿(1009),兩組所述承重桿(1007)內壁均設置有推動塊(1006),兩組所述滑動桿(1009)貫穿推動塊(1006),且與其固定連接,兩組所述推動塊(1006)底部均固定連接有推動板(1008),兩組所述推動塊(1006)靠近轉動塊(1003)的一側均固定連接有彎折桿(1004),兩組所述彎折桿(1004)遠離推動塊(1006)的一側與轉動塊(1003)固定連接。
技術總結
本發明涉及機械手技術領域,且公開了一種截止閥密封圈自動裝配機械手,包括固定板,所述固定板頂部固定連接有兩組支撐板,兩組所述支撐板相互靠近的一側固定連接有電機,所述電機輸出端嚙合連接有齒輪,所述固定板底部固定連接有定位塊,所述定位塊內壁設置有螺紋桿,所述螺紋桿下兩端與定位塊內壁固定連接,所述螺紋桿上端貫穿定位塊與固定板。本發明通過設置第一夾具與第二夾具,可以在對密封圈進行夾持時通過第二夾具與第二夾具的長度不一,使得只能夾持密封圈的邊緣處,且設置第二夾具比第一夾具短還可以在對密封圈進行放置時,通過先移動第一夾具再移動第二夾具,不會對密封圈進行二次觸碰。
技術研發人員:王峰,韓正海,王寅,陳挺,江鑫,周忠,韓雪萍,皋園園
受保護的技術使用者:江蘇蘇鹽閥門機械有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!