一種九軸聯動多運動裝置的制作方法
本發明涉及自動化,尤其是指一種九軸聯動多運動裝置。
背景技術:
1、隨著科學技術的不斷發展,在現有的制造工業中,數控技術成為現代化工業生產和工業化技術中必不可少的技術,如在電子、航空、汽車等的精密零器件加工設備的工業生產中,以及如機器人運動等的工業控制中。
2、其中,運動平臺屬于機床設備的一部分,用于帶動工件在加工、測試等作業工序中運動至指定位置,運動的方向通常包括x軸、y軸、z軸的直線運動,以及繞x軸、y軸、z軸的回轉運動,甚至繞x軸、y軸的旋轉運動。
3、隨著高精密定位的多軸運動平臺在半導體制造等精密加工領域內的廣泛應用,要求多軸運動平臺具有更多運動形式的組合以達到性能的優化,即需要有平移同時還需要具備旋轉,更甚者還需要具有弧形運動。但是,目前的運動平臺不僅結構復雜不利于提高平臺的運動響應性能,還導致平臺整體的縱向尺寸空間較大使得平臺運動精度較低,難于滿足半導體制造領域對運動平臺高精度的實際應用需求。
技術實現思路
1、為此,本發明所要解決的技術問題在于克服現有技術中對于更高要求的運動平臺,集成度不高,同時無法兼顧使用空間以及運動精度的問題。
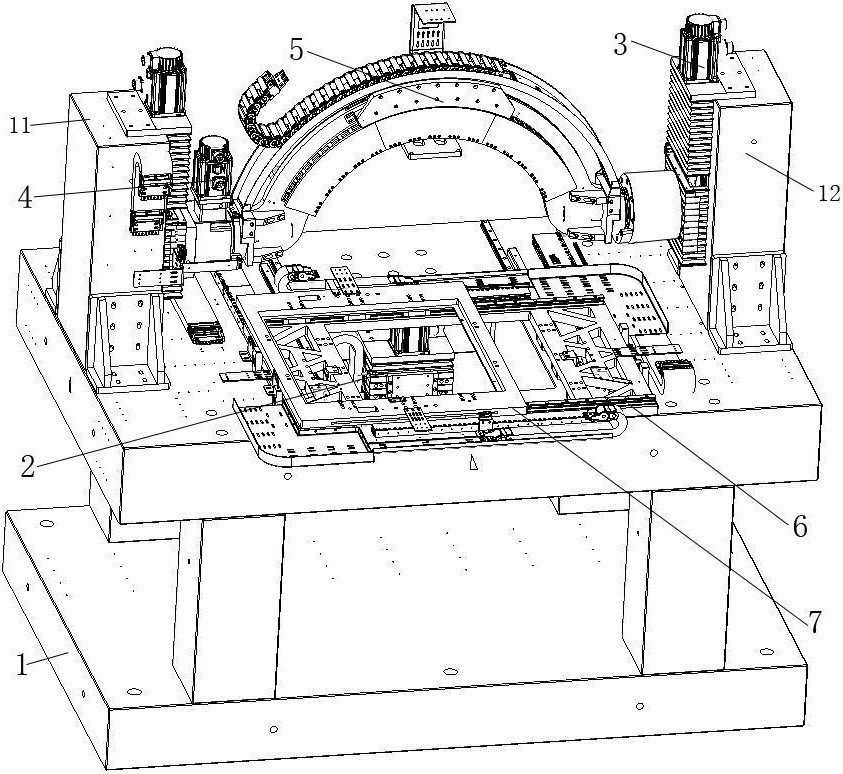
2、為解決上述技術問題,本發明提供了一種九軸聯動多運動裝置,包括:支撐平臺,其上設有支撐立柱一和支撐立柱二;升降單元一,其安裝在支撐平臺上,所述升降單元一用于工作端一升降;升降單元二,其設置為兩組,兩組所述升降單元二分別安裝在支撐立柱一和支撐立柱二上;旋轉單元,其安裝在兩組所述升降單元二之間,并且升降單元二用于調節旋轉單元的高度;弧形運動單元,其與旋轉單元連接,所述旋轉單元用于驅動弧形運動單元實現360°旋轉,所述弧形運動單元上設有工作端二,并且弧形運動單元驅動工作端二實現弧形運動;x軸移動單元,其安裝在支撐平臺上;y軸移動單元,其設置在x軸移動單元上,所述x軸移動單元和y軸移動單元構成xy雙軸運動系統。本發明的九軸聯動多運動裝置,在可實現三維方向精密運動的前提下,還可實現兩個方向的精密旋轉運動。
3、在本發明的一個實施例中,所述升降單元一包括安裝座一、升降驅動電機一、升降絲桿一和升降滑塊一,所述安裝座一和支撐平臺固定連接,所述升降驅動電機一和升降絲桿一安裝在安裝座一上,并且升降驅動電機一的輸出端和升降絲桿一連接,所述升降滑塊一和升降絲桿一的螺母副連接。
4、在本發明的一個實施例中,所述升降單元二包括升降驅動電機二、升降絲桿二、升降滑板二、升降導軌二和升降滑塊二,所述升降驅動電機二的輸出端和升降絲桿二連接,所述升降滑板二和升降絲桿二的螺母副連接,所述升降滑塊二和升降滑板二固定連接,所述升降滑塊二設置在升降導軌二上,并且升降滑塊二能夠沿升降導軌二滑移,所述旋轉單元設置在升降滑板二上。
5、在本發明的一個實施例中,所述旋轉單元包括旋轉驅動電機、齒輪箱、兩個軸承座和兩個旋轉軸,所述旋轉驅動電機的輸出端和齒輪箱連接,所述齒輪箱和兩個旋轉軸其中之一連接,所述軸承座和升降滑板二連接,所述兩個軸承座和兩個旋轉軸一一對應設置,所述旋轉軸通過軸承與軸承座連接,所述旋轉軸連接弧形運動單元。
6、在本發明的一個實施例中,所述弧形運動單元包括弧形支撐架、弧形電機和移動支架,所述弧形支撐架的兩端連接兩個旋轉軸,所述弧形電機安裝在弧形支撐架上,所述移動支架與弧形電機的動子連接,并且移動支架與弧形支撐架滑動連接。
7、在本發明的一個實施例中,所述x軸移動單元包括兩個x軸直線電機、x軸載臺、x軸滑軌和x軸滑塊,所述兩個x軸直線電機和x軸滑軌均在裝在支撐平臺上,所述x軸載臺和x軸直線電機的動子連接,所述x軸滑塊安裝在x軸載臺上,并且x軸滑塊和x軸滑軌滑動連接,所述y軸移動單元設置在x軸載臺上。
8、在本發明的一個實施例中,所述支撐平臺上安裝有安裝條一,所述安裝條一上設有光柵尺一,所述x軸載臺上安裝有編碼器一,所述編碼器一和光柵尺一用于標定x軸載臺的移動位置。
9、在本發明的一個實施例中,所述y軸移動單元包括兩個y軸直線電機、y軸載臺、y軸滑軌和y軸滑塊,所述y軸直線電機和y軸滑軌均安裝在x軸載臺上,所述y軸載臺和y軸直線電機的動子連接,所述y軸滑塊和y軸滑軌連接,并且y軸滑塊和y軸滑軌滑動連接。
10、在本發明的一個實施例中,所述y軸載臺上安裝有光柵尺二,所述x軸載臺上安裝有編碼器二,所述編碼器二和光柵尺二用于標定y軸載臺的位置。
11、在本發明的一個實施例中,所述軸承座上設有軸承,所述旋轉軸和軸承連接。
12、本發明的上述技術方案相比現有技術具有以下有益效果:
13、本發明所述的九軸聯動多運動裝置,在空間、精度與成本為前提基礎上,為實現整個設備能進行各方向(x、y、z方向移動及r、θ方向旋轉)的精密運動。現設計以直驅電機、弧形電機、伺服絲桿、伺服旋轉平臺作動力源來實現9軸聯動的精密模組,從而使設備具備工作末端輻射空間廣,運動精度高,成本低等優點。
技術特征:
1.一種九軸聯動多運動裝置,其特征在于,包括:
2.根據權利要求1所述的九軸聯動多運動裝置,其特征在于:所述升降單元一包括安裝座一、升降驅動電機一、升降絲桿一和升降滑塊一,所述安裝座一和支撐平臺固定連接,所述升降驅動電機一和升降絲桿一安裝在安裝座一上,并且升降驅動電機一的輸出端和升降絲桿一連接,所述升降滑塊一和升降絲桿一的螺母副連接。
3.根據權利要求1或2所述的九軸聯動多運動裝置,其特征在于:所述升降單元二包括升降驅動電機二、升降絲桿二、升降滑板二、升降導軌二和升降滑塊二,所述升降驅動電機二的輸出端和升降絲桿二連接,所述升降滑板二和升降絲桿二的螺母副連接,所述升降滑塊二和升降滑板二固定連接,所述升降滑塊二設置在升降導軌二上,并且升降滑塊二能夠沿升降導軌二滑移,所述旋轉單元設置在升降滑板二上。
4.根據權利要求3所述的九軸聯動多運動裝置,其特征在于:所述旋轉單元包括旋轉驅動電機、齒輪箱、兩個軸承座和兩個旋轉軸,所述旋轉驅動電機的輸出端和齒輪箱連接,所述齒輪箱和兩個旋轉軸其中之一連接,所述軸承座和升降滑板二連接,所述兩個軸承座和兩個旋轉軸一一對應設置,所述旋轉軸通過軸承與軸承座連接,所述旋轉軸連接弧形運動單元。
5.根據權利要求4所述的九軸聯動多運動裝置,其特征在于:所述弧形運動單元包括弧形支撐架、弧形電機和移動支架,所述弧形支撐架的兩端連接兩個旋轉軸,所述弧形電機安裝在弧形支撐架上,所述移動支架與弧形電機的動子連接,并且移動支架與弧形支撐架滑動連接。
6.根據權利要求1所述的九軸聯動多運動裝置,其特征在于:所述x軸移動單元包括兩個x軸直線電機、x軸載臺、x軸滑軌和x軸滑塊,所述兩個x軸直線電機和x軸滑軌均在裝在支撐平臺上,所述x軸載臺和x軸直線電機的動子連接,所述x軸滑塊安裝在x軸載臺上,并且x軸滑塊和x軸滑軌滑動連接,所述y軸移動單元設置在x軸載臺上。
7.根據權利要求6所述的九軸聯動多運動裝置,其特征在于:所述支撐平臺上安裝有安裝條一,所述安裝條一上設有光柵尺一,所述x軸載臺上安裝有編碼器一,所述編碼器一和光柵尺一用于標定x軸載臺的移動位置。
8.根據權利要求6所述的九軸聯動多運動裝置,其特征在于:所述y軸移動單元包括兩個y軸直線電機、y軸載臺、y軸滑軌和y軸滑塊,所述y軸直線電機和y軸滑軌均安裝在x軸載臺上,所述y軸載臺和y軸直線電機的動子連接,所述y軸滑塊和y軸滑軌連接,并且y軸滑塊和y軸滑軌滑動連接。
9.根據權利要求8所述的九軸聯動多運動裝置,其特征在于:所述y軸載臺上安裝有光柵尺二,所述x軸載臺上安裝有編碼器二,所述編碼器二和光柵尺二用于標定y軸載臺的位置。
10.根據權利要求4所述的九軸聯動多運動裝置,其特征在于:所述軸承座上設有軸承,所述旋轉軸和軸承連接。
技術總結
本發明涉及一種九軸聯動多運動裝置,包括:支撐平臺,其上設有支撐立柱一和支撐立柱二;升降單元一,其用于工作端一升降;升降單元二,其設置為兩組,分別安裝在支撐立柱一和支撐立柱二上;旋轉單元,其安裝在兩組升降單元二之間,并且升降單元二用于調節旋轉單元的高度;弧形運動單元,其與旋轉單元連接,旋轉單元用于驅動弧形運動單元實現360°旋轉,弧形運動單元上設有工作端二,并且弧形運動單元驅動工作端二實現弧形運動;X軸移動單元;Y軸移動單元,其設置在X軸移動單元上,X軸移動單元和Y軸移動單元構成XY雙軸運動系統。本發明的九軸聯動多運動裝置,在可實現三維方向精密運動的前提下,還可實現兩個方向的精密旋轉運動。
技術研發人員:許錦銘,蔡東,周威,劉浩
受保護的技術使用者:蘇州泰科貝爾直驅電機有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!