一種陸空兩棲飛行器的制作方法
本發(fā)明涉及交通工具,具體涉及一種一種陸空兩棲飛行器。
背景技術(shù):
1、隨著各大城市出現(xiàn)的道路擁擠和車輛堵塞的情況越來越多,傳統(tǒng)的地面交通路線不斷向空間立體式交通發(fā)展,但僅僅通過地下地鐵通道或路面立交建設(shè)還是無法有效解決該問題,目前,為了更好地利用空中區(qū)域減少擁堵,空中飛行器逐漸進(jìn)入人們的視野。
2、中國專利cn208881509u提出了一種飛行摩托車,雖然可以分別在路面和空中行駛,但仍存在這以下幾點(diǎn)問題:
3、(1)當(dāng)在空中行駛時(shí),摩托車的機(jī)架形式會使駕駛者承受過大的風(fēng)力和氣流,影響駕駛安全;
4、(2)裝置缺乏降落輔助裝置,降落時(shí)存在安全隱患;
5、(3)螺旋槳數(shù)量較少,飛行動(dòng)力不足。
6、因此亟需一種新型的陸空兩棲飛行器來解決上述問題。
技術(shù)實(shí)現(xiàn)思路
1、針對上述問題,本發(fā)明的目的是:提供一種動(dòng)力足、駕駛安全、著陸安全的陸空兩棲飛行器。
2、為了實(shí)現(xiàn)上述目的,本發(fā)明提供如下的技術(shù)方案:一種陸空兩棲飛行器,包括機(jī)架、路面動(dòng)力系統(tǒng)、飛行動(dòng)力系統(tǒng)、起落架系統(tǒng)、絲桿控制系統(tǒng)、能源模塊及控制模塊;所述路面動(dòng)力系統(tǒng)、飛行動(dòng)力系統(tǒng)、起落架系統(tǒng)、絲桿控制系統(tǒng)、能源模塊及控制模塊均固定設(shè)置在機(jī)架上。
3、作為本發(fā)明的一種優(yōu)選結(jié)構(gòu),所述起落架系統(tǒng)包括起落架輔助輪和驅(qū)動(dòng)機(jī)構(gòu);所述飛行動(dòng)力系統(tǒng)包括螺旋槳、電機(jī)和電調(diào);所述絲桿控制系統(tǒng)包括伺服驅(qū)動(dòng)器、伺服電機(jī)和絲桿機(jī)構(gòu);所述控制模塊包括切換器和與切換器電性連接的輪轂電機(jī)控制器、起落架控制器、飛行控制器和絲桿推動(dòng)控制器,輪轂電機(jī)控制器和路面動(dòng)力系統(tǒng)電性連接,起落架控制器和起落架系統(tǒng)電性連接,飛行控制器和飛行動(dòng)力系統(tǒng)電性連接,絲桿推動(dòng)控制器和絲桿控制系統(tǒng)電性連接。
4、作為本發(fā)明的一種優(yōu)選結(jié)構(gòu),所述螺旋槳設(shè)有四組共八個(gè),每組螺旋槳均活動(dòng)連接有一個(gè)電機(jī),所述飛行控制器能夠控制電機(jī)使螺旋槳向內(nèi)收縮。
5、作為本發(fā)明的一種優(yōu)選結(jié)構(gòu),所述每組的兩個(gè)螺旋槳上下對稱設(shè)置。
6、作為本發(fā)明的一種優(yōu)選結(jié)構(gòu),所述起落架輔助輪為兩個(gè),左右對稱設(shè)置。
7、作為本發(fā)明的一種優(yōu)選結(jié)構(gòu),所述伺服驅(qū)動(dòng)器通過伺服電機(jī)驅(qū)動(dòng)絲桿機(jī)構(gòu)。
8、作為本發(fā)明的一種優(yōu)選結(jié)構(gòu),所述機(jī)架為封閉車廂型設(shè)計(jì),車頂上固定連接有絲桿控制系統(tǒng),所述絲桿控制系統(tǒng)上方設(shè)置有車蓋,所述車頂與車蓋可拆卸連接。
9、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果為:
10、(1)本發(fā)明機(jī)架為封閉車廂型設(shè)計(jì),即使在空中飛行時(shí)也可以使駕駛員避免風(fēng)力及氣流影響;
11、(2)本發(fā)明設(shè)置起落架系統(tǒng),通過對稱設(shè)置的兩個(gè)起落架輔助輪一是使路面行駛時(shí)駕駛更平穩(wěn),二是使飛行器著陸時(shí)更安全,通過設(shè)置的緩沖機(jī)構(gòu)提供著陸緩沖,避免降落時(shí)壓力過大;
12、(3)本發(fā)明設(shè)有四組共八個(gè)螺旋槳,提供更大的飛行動(dòng)力。
技術(shù)特征:
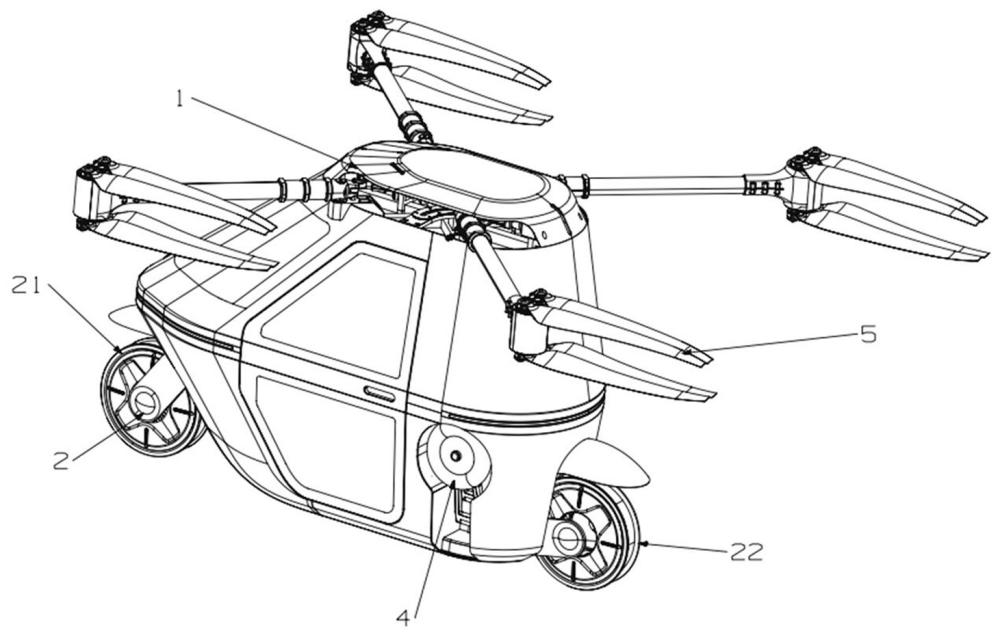
1.一種陸空兩棲飛行器,其特征在于:包括機(jī)架(1)和設(shè)置在機(jī)架(1)上的路面動(dòng)力系統(tǒng)(2)、能源模塊(3)、起落架系統(tǒng)(4)、飛行動(dòng)力系統(tǒng)(5)、絲桿控制系統(tǒng)(6)和控制模塊(7);所述路面動(dòng)力系統(tǒng)(2)包括輪轂電機(jī)(21)、前輪(22)和后輪(23);所述起落架系統(tǒng)(4)包括起落架輔助輪(41)、驅(qū)動(dòng)機(jī)構(gòu)(42)和緩沖機(jī)構(gòu)(43);所述飛行動(dòng)力系統(tǒng)(5)包括螺旋槳(51)、電機(jī)(52)和電調(diào)(53);所述絲桿控制系統(tǒng)(6)包括伺服驅(qū)動(dòng)器(61)、伺服電機(jī)(62)和絲桿機(jī)構(gòu)(63);所述控制模塊(7)包括切換器(71)和與切換器(71)電性連接的輪轂電機(jī)控制器(72)、起落架控制器(73)、飛行控制器(74)和絲桿推動(dòng)控制器(75),輪轂電機(jī)控制器(72)和路面動(dòng)力系統(tǒng)(2)電性連接,起落架控制器(73)和起落架系統(tǒng)(4)電性連接,飛行控制器(74)和飛行動(dòng)力系統(tǒng)(5)電性連接,絲桿推動(dòng)控制器(75)和絲桿控制系統(tǒng)(6)電性連接。
2.根據(jù)權(quán)利要求1所述的一種陸空兩棲飛行器,其特征在于:
3.根據(jù)權(quán)利要求1所述的一種陸空兩棲飛行器,其特征在于:
4.根據(jù)權(quán)利要求3所述的一種陸空兩棲飛行器,其特征在于:
5.根據(jù)權(quán)利要求1所述的一種陸空兩棲飛行器,其特征在于:
6.根據(jù)權(quán)利要求1所述的一種陸空兩棲飛行器,其特征在于:
7.根據(jù)權(quán)利要求1所述的一種陸空兩棲飛行器,其特征在于:
技術(shù)總結(jié)
本發(fā)明公開了一種陸空兩棲飛行器,屬于交通工具技術(shù)領(lǐng)域,包括機(jī)架和設(shè)置在機(jī)架上的路面動(dòng)力系統(tǒng)、能源模塊、起落架系統(tǒng)、飛行動(dòng)力系統(tǒng)、絲桿控制系統(tǒng)和控制模塊;所述起落架系統(tǒng)包括起落架輔助輪和驅(qū)動(dòng)機(jī)構(gòu);所述飛行動(dòng)力系統(tǒng)包括螺旋槳、電機(jī)和電調(diào);所述絲桿控制系統(tǒng)包括伺服驅(qū)動(dòng)器、伺服電機(jī)和絲桿機(jī)構(gòu);所述控制模塊包括切換器和與切換器電性連接的輪轂電機(jī)控制器、起落架控制器、飛行控制器和絲桿推動(dòng)控制器,輪轂電機(jī)控制器和路面動(dòng)力系統(tǒng)電性連接,起落架控制器和起落架系統(tǒng)電性連接,飛行控制器和飛行動(dòng)力系統(tǒng)電性連接,絲桿推動(dòng)控制器和絲桿控制系統(tǒng)電性連接。
技術(shù)研發(fā)人員:楊臣康,劉峰,薛祖播,譚強(qiáng)
受保護(hù)的技術(shù)使用者:南京快輪智能科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!