一種可調(diào)節(jié)磁力的爬壁機(jī)器人永磁吸附裝置及控制方法
本發(fā)明屬于磁吸附爬壁機(jī)器人,具體涉及一種可調(diào)節(jié)磁力的爬壁機(jī)器人永磁吸附裝置及控制方法。
背景技術(shù):
1、鋼橋暴露于室外,長(zhǎng)期受風(fēng)吹、日曬、雨淋、濕氣等自然因素的影響,臨近海域的鋼橋甚至受到氯離子侵蝕,其表面會(huì)逐漸出現(xiàn)生銹、腐蝕等問(wèn)題,不僅會(huì)顯著縮短結(jié)構(gòu)的使用壽命,還可能導(dǎo)致嚴(yán)重的安全隱患,因此需要定期對(duì)鋼橋進(jìn)行檢測(cè)和維護(hù)。傳統(tǒng)方式通常依賴工人高空作業(yè),不僅效率低下,且工人的安全難以得到有效保障。爬壁機(jī)器人能夠代替人工進(jìn)行鋼橋的檢測(cè)和維護(hù),吸附系統(tǒng)是爬壁機(jī)器人至關(guān)重要的組成部分,而傳統(tǒng)的磁吸附裝置通常依賴固定的磁力附著于作業(yè)壁面,但是隨著機(jī)器人在不同曲率和復(fù)雜壁面下的作業(yè)需求不斷增加,傳統(tǒng)的磁吸附裝置逐漸暴露出能耗高、耐久性不足以及磁力調(diào)節(jié)不靈活等缺陷,嚴(yán)重影響爬壁機(jī)器人在實(shí)際應(yīng)用中的效率和適應(yīng)性。
2、公布號(hào)為cn107310640a的專(zhuān)利申請(qǐng)公開(kāi)了一種履帶式電磁吸附爬壁機(jī)器人行走機(jī)構(gòu),利用電控技術(shù)對(duì)電磁鐵的吸附力進(jìn)行精確控制,可實(shí)現(xiàn)在豎直壁面或水平壁面的攀爬。雖然該爬壁機(jī)器人的電磁吸附裝置能夠通過(guò)調(diào)節(jié)電流改變磁力大小,但是斷電時(shí)則有墜落的風(fēng)險(xiǎn)。公布號(hào)為cn102745278a的專(zhuān)利申請(qǐng)公開(kāi)了一種帶自鎖裝置的永磁吸附爬壁機(jī)器人,通過(guò)鏈輪驅(qū)動(dòng)系統(tǒng)與永磁吸附單元的配合實(shí)現(xiàn)了爬壁運(yùn)動(dòng)。然而,該裝置產(chǎn)生的吸附力是固定的,無(wú)法根據(jù)作業(yè)環(huán)境的需求進(jìn)行調(diào)整,在不需要強(qiáng)吸附力時(shí),仍提供過(guò)大的吸附力會(huì)導(dǎo)致機(jī)器人運(yùn)動(dòng)過(guò)程中的阻力過(guò)大,影響爬壁機(jī)器人的作業(yè)效率。在機(jī)器人脫離壁面時(shí),永磁吸附單元的消磁過(guò)程相對(duì)復(fù)雜且不便,影響操作效率。
3、綜上所述,電磁吸附裝置盡管具有磁力可調(diào)的特點(diǎn),但是由于能耗高、續(xù)航能力有限及耐久性不足,難以適應(yīng)長(zhǎng)時(shí)間、高強(qiáng)度的作業(yè)任務(wù),在斷電時(shí)還存在墜落的風(fēng)險(xiǎn)。永磁吸附裝置憑借其低能耗和持久性的優(yōu)勢(shì),能夠有效滿足爬壁機(jī)器人長(zhǎng)時(shí)間作業(yè)的需求。然而,傳統(tǒng)的永磁吸附裝置產(chǎn)生的吸附力通常恒定,無(wú)法根據(jù)實(shí)際需求進(jìn)行調(diào)節(jié)。一方面,由于在豎直壁面、傾斜壁面、壁面交角及壁面某些局部凹凸部位等不同壁面上所需的吸附力不同,吸附力過(guò)大會(huì)導(dǎo)致爬壁機(jī)器人運(yùn)動(dòng)困難,吸附力過(guò)小則會(huì)導(dǎo)致失穩(wěn)。另一方面,在爬壁機(jī)器人作業(yè)完成后,較大的恒定吸附力會(huì)使其難以脫離壁面,強(qiáng)行脫離會(huì)對(duì)機(jī)器人結(jié)構(gòu)甚至壁面造成損傷。少數(shù)的磁吸附裝置雖然具有可調(diào)磁力的功能,但是調(diào)節(jié)方向常與磁力一致,對(duì)調(diào)節(jié)外力要求較高,效能低,限制了機(jī)器人在不同作業(yè)場(chǎng)景下的適應(yīng)性和操作靈活性。
技術(shù)實(shí)現(xiàn)思路
1、針對(duì)現(xiàn)有技術(shù)的不足,本發(fā)明擬解決的技術(shù)問(wèn)題是,提供一種可調(diào)節(jié)磁力的爬壁機(jī)器人永磁吸附裝置及控制方法。
2、本發(fā)明解決所述技術(shù)問(wèn)題采用如下的技術(shù)方案:
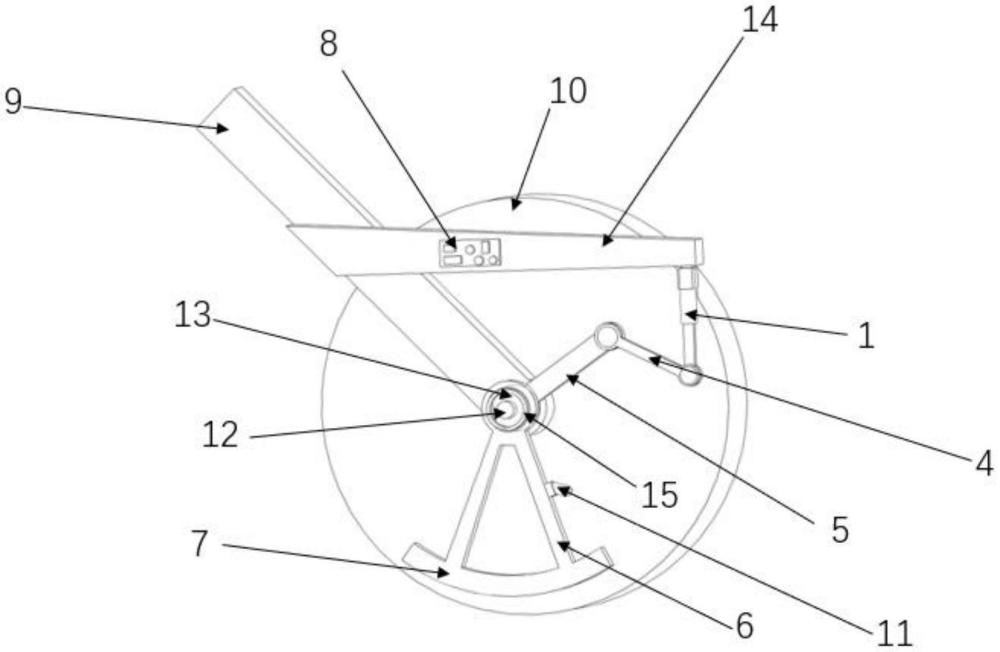
3、一種可調(diào)節(jié)磁力的爬壁機(jī)器人永磁吸附裝置,其特征在于,該裝置包括電動(dòng)推桿、連桿、擺臂、支撐架、弧形永磁鐵、超聲波傳感器、樞軸、剛臂和壓力傳感器;所述樞軸安裝在爬壁機(jī)器人的車(chē)軸上,同時(shí)與爬壁機(jī)器人車(chē)架支撐臂下端固連;剛臂的一端與爬壁機(jī)器人車(chē)架支撐臂的中部固連,電動(dòng)推桿位于剛臂的另一端且伸縮方向始終沿豎直方向,電動(dòng)推桿的伸縮桿末端與連桿的一端轉(zhuǎn)動(dòng)連接,連桿的另一端與擺臂的一端轉(zhuǎn)動(dòng)連接,擺臂的另一端與支撐架的上端固連,支撐架的上端同時(shí)與樞軸轉(zhuǎn)動(dòng)連接,弧形永磁鐵位于支撐架的下端;通過(guò)電動(dòng)推桿驅(qū)動(dòng)弧形永磁鐵轉(zhuǎn)動(dòng),調(diào)整弧形永磁鐵與壁面之間的距離從而實(shí)現(xiàn)磁吸附力可調(diào),同時(shí)使磁吸附力調(diào)節(jié)方向沿磁力線切線方向;
4、所述超聲波傳感器位于支撐架上,用于測(cè)量安裝位置與壁面之間的距離;壓力傳感器位于支撐架與樞軸之間,用于測(cè)量支撐架對(duì)樞軸施加的作用力。
5、進(jìn)一步的,該裝置的控制方法包括以下內(nèi)容:
6、在壁面上對(duì)爬壁機(jī)器人進(jìn)行受力分析,得到磁力設(shè)計(jì)值fd,根據(jù)式(1)計(jì)算弧形永磁鐵的磁力集中點(diǎn)與壁面之間的距離標(biāo)準(zhǔn)值d0,弧形永磁鐵的磁力集中點(diǎn)為弧形永磁鐵外邊緣的中心點(diǎn);
7、
8、式中,k是常數(shù);
9、基于超聲波傳感器測(cè)量的距離數(shù)據(jù),根據(jù)幾何關(guān)系,得到弧形永磁鐵的磁力集中點(diǎn)與壁面之間的距離d;根據(jù)幾何關(guān)系,可得弧形永磁鐵的轉(zhuǎn)角變化量δξ與d、d0的關(guān)系式為:
10、
11、式中,d2是弧形永磁鐵的磁力集中點(diǎn)到樞軸軸線之間的距離,r是車(chē)輪半徑;
12、即弧形永磁鐵的轉(zhuǎn)角變化量δξ與電動(dòng)推桿的伸縮量δl之間的關(guān)系式為:
13、
14、聯(lián)立式(2)和(12),可得電動(dòng)推桿的伸縮量δl的計(jì)算式為:
15、
16、式中,l2是連桿長(zhǎng)度,l1是初始狀態(tài)下連桿在豎直方向上的投影長(zhǎng)度,d1是擺臂長(zhǎng)度,x2是初始狀態(tài)下擺臂在水平方向上的投影長(zhǎng)度;
17、通過(guò)控制電動(dòng)推桿的電機(jī)轉(zhuǎn)動(dòng)時(shí)間,控制電動(dòng)推桿的伸縮量,使弧形永磁鐵的磁力集中點(diǎn)與壁面之間的距離等于距離標(biāo)準(zhǔn)值;
18、基于壓力傳感器測(cè)量的力數(shù)據(jù),對(duì)弧形永磁鐵進(jìn)行受力分析,可得實(shí)際磁吸附力f;根據(jù)實(shí)際磁吸附力f和磁力設(shè)計(jì)值fd,可得電動(dòng)推桿的推拉力變化量δn為:
19、
20、式中,α1是磁吸附力與豎直方向的夾角,β1是初始狀態(tài)下電動(dòng)推桿與連桿之間的夾角,γ是初始狀態(tài)下連桿與擺臂之間的夾角;
21、通過(guò)控制電動(dòng)推桿的驅(qū)動(dòng)力,控制電動(dòng)推桿的推拉力變化量,使實(shí)際磁吸附力等于磁力設(shè)計(jì)值。
22、進(jìn)一步的,要實(shí)現(xiàn)弧形永磁鐵的旋轉(zhuǎn)運(yùn)動(dòng),電動(dòng)推桿的驅(qū)動(dòng)力n1須滿足以下條件:
23、
24、與現(xiàn)有技術(shù)相比,本發(fā)明具有如下有益效果:
25、1、本發(fā)明是一種基于永磁吸附技術(shù)的可調(diào)節(jié)磁力吸附裝置,與傳統(tǒng)的電磁吸附裝置相比,具有磁力穩(wěn)定的優(yōu)勢(shì),在斷電的情況下不存在墜落風(fēng)險(xiǎn)。通過(guò)弧形永磁鐵的旋轉(zhuǎn)運(yùn)動(dòng)調(diào)節(jié)其位置,進(jìn)而調(diào)節(jié)弧形永磁鐵的磁力集中點(diǎn)與壁面之間的距離,實(shí)現(xiàn)永磁鐵產(chǎn)生的磁吸附力大小可調(diào),距離越大磁吸附力越小,距離越小磁吸附力越大,使裝置能夠適應(yīng)水平壁面、豎直壁面、傾斜壁面、壁面交角、凹凸壁面等不同作業(yè)環(huán)境,或者機(jī)器人安裝、脫離等不同動(dòng)作。在任務(wù)結(jié)束后,現(xiàn)有技術(shù)一般都是通過(guò)插裝額外的墊板以增大爬壁機(jī)器人與壁面之間的距離,進(jìn)而減小磁吸附力使爬壁機(jī)器人脫離,這種方式不僅操作繁瑣,而且增加了高空作業(yè)的風(fēng)險(xiǎn),而本發(fā)明在任務(wù)結(jié)束后通過(guò)增大弧形永磁鐵與壁面之間的距離使磁吸附力減小,從而使爬壁機(jī)器人更容易脫離壁面,不需要采用額外措施,降低了高空作業(yè)的風(fēng)險(xiǎn)。通過(guò)改變弧形永磁鐵的位置還可以改變磁場(chǎng)方向,使單位作用力下磁力增減功效大幅增加,不僅加速了調(diào)節(jié)過(guò)程,還提高了裝置使用的便利性。
26、弧形永磁鐵繞著樞軸軸線作圓周運(yùn)動(dòng),運(yùn)動(dòng)方向與磁力線相切,磁吸附力的調(diào)整方式采用與磁力線切向而非法向,克服了沿磁力線法向調(diào)節(jié)磁力時(shí)需提供較大軸向作用力的缺陷,所需的調(diào)整外力大幅減小,縮減了支撐構(gòu)件的尺寸,使得爬壁機(jī)器人的自重減輕,節(jié)約能耗。
27、2、調(diào)節(jié)磁吸附力所需外力矩的施加采用杠桿原理,通過(guò)連桿對(duì)擺臂的端部施加作用力,借助擺臂長(zhǎng)度的放大效應(yīng),較小的作用力就能產(chǎn)生較大的驅(qū)動(dòng)力矩,進(jìn)而驅(qū)動(dòng)弧形永磁鐵轉(zhuǎn)動(dòng),使得磁力調(diào)控效能大幅提升,并且避免了直接增設(shè)扭力矩電機(jī)帶來(lái)的機(jī)器人成本增加及控制系統(tǒng)復(fù)雜的問(wèn)題。通過(guò)連桿將電動(dòng)推桿的伸縮運(yùn)動(dòng)轉(zhuǎn)換為弧形永磁鐵的旋轉(zhuǎn)運(yùn)動(dòng),電動(dòng)推桿的動(dòng)力輸出穩(wěn)定且動(dòng)力輸出方向恒定,通過(guò)控制電動(dòng)推桿實(shí)現(xiàn)磁吸附力的精準(zhǔn)調(diào)控。
28、3、基于超聲波傳感器和壓力傳感器采集的數(shù)據(jù)實(shí)現(xiàn)了磁吸附力的自適應(yīng)動(dòng)態(tài)調(diào)控,通過(guò)控制電動(dòng)推桿的伸縮量和驅(qū)動(dòng)力,分別調(diào)節(jié)弧形永磁鐵的磁力集中點(diǎn)與壁面之間的距離和實(shí)際磁吸附力,實(shí)現(xiàn)距離和磁吸附力的協(xié)同控制,保證磁吸附裝置的吸附效果。
29、4、本發(fā)明有效解決了爬壁機(jī)器人在鋼橋表面作業(yè)過(guò)程中,磁吸附力難以靈活調(diào)節(jié)的問(wèn)題,特別是機(jī)器人進(jìn)行壁面過(guò)渡或脫離鋼橋表面時(shí),通過(guò)動(dòng)態(tài)調(diào)整磁力,避免了因磁力不足或過(guò)大而導(dǎo)致的失穩(wěn)問(wèn)題,顯著提升了爬壁機(jī)器人的安全性和可靠性。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!