一種基于六桿張拉整體結構的水陸空三棲探測器
本發明涉及探測器,具體涉及一種水陸空三棲防碰撞張拉整體無人飛行探測器。適用于探測器以及工業巡檢、災后救援領域。
背景技術:
1、在無人探測技術領域,傳統無人飛行探測器的功能相對單一,主要局限于空中飛行,且在防碰撞性能方面存在不足,無法在水下執行任務,對復雜環境變化的適應能力非常有限。隨著該技術的逐漸普及,其探測領域的單一化問題日益凸顯,僅適用于無障礙物的自由空間,缺乏水陸空三棲探測能力,難以滿足高效探測的需求。
2、目前市面上的無人飛行探測器存在以下問題:
3、(1)缺乏跨介質作業能力:無法在水、陸、空不同介質間自由切換,嚴重限制了其應用范圍。例如,在進行海洋環境監測時,無法直接從空中入水進行探測,必須更換專門的水下探測設備,這不僅增加了作業成本,且延長了作業時間。
4、(2)防碰撞性能差:結構設計缺乏彈性緩沖機制,遭遇碰撞時容易損壞內部元器件,導致探測器失效。
5、(3)制造成本高昂:復雜的結構設計和高端零部件的使用,使得制造成本居高不下,不利于大規模推廣應用。
6、(4)體積和重量過大:笨重的機身不僅降低了能源利用效率,還限制了其在狹小空間的作業能力,如在城市建筑物密集區域或狹窄管道內難以靈活操作。
7、(5)可靠性和穩定性欠缺:受限于結構和系統設計,在復雜環境下容易出現故障,影響探測任務的連續性。例如,在強風、水流湍急等惡劣環境中,飛行姿態難以保持穩定,數據采集準確性降低。
8、(6)維護性差:內部結構復雜,零部件通用性低,維修難度大且成本高,一旦出現故障,維修周期長,降低了設備的使用效率。
9、(7)能源利用效率低:無法在陸地滑動探測,只能貼地飛行,造成能源浪費。
10、隨著現代社會對探測任務需求的日益多樣化和復雜化,市場迫切需要一款能夠適應非結構化環境作業、對外界環境具有被動適應性,可在復雜地形進行水陸空三棲探測的無人飛行探測器。
技術實現思路
1、本發明旨在基于六桿張拉整體結構,融合密封艙系統、四旋翼系統以及控制動力系統,設計一款新型無人飛行探測器。該探測器不僅具備卓越的防碰撞性能,還能實現空中飛行、地面滑行和水下潛航,適應水陸空三棲復雜環境;同時,探測器采用小型化、輕量化設計。綜上所述,該探測器有效解決了現有探測器存在的諸多問題,如缺乏跨介質能力、防碰撞性能差、結構復雜、成本高昂、體積和重量過大、環境適應性弱、維護困難以及可靠性和穩定性不足等,具有顯著的應用價值。
2、本發明為實現上述技術方案,采用如下技術方案:
3、一種基于六桿張拉整體結構的水陸空三棲探測器,其特征在于,包括:
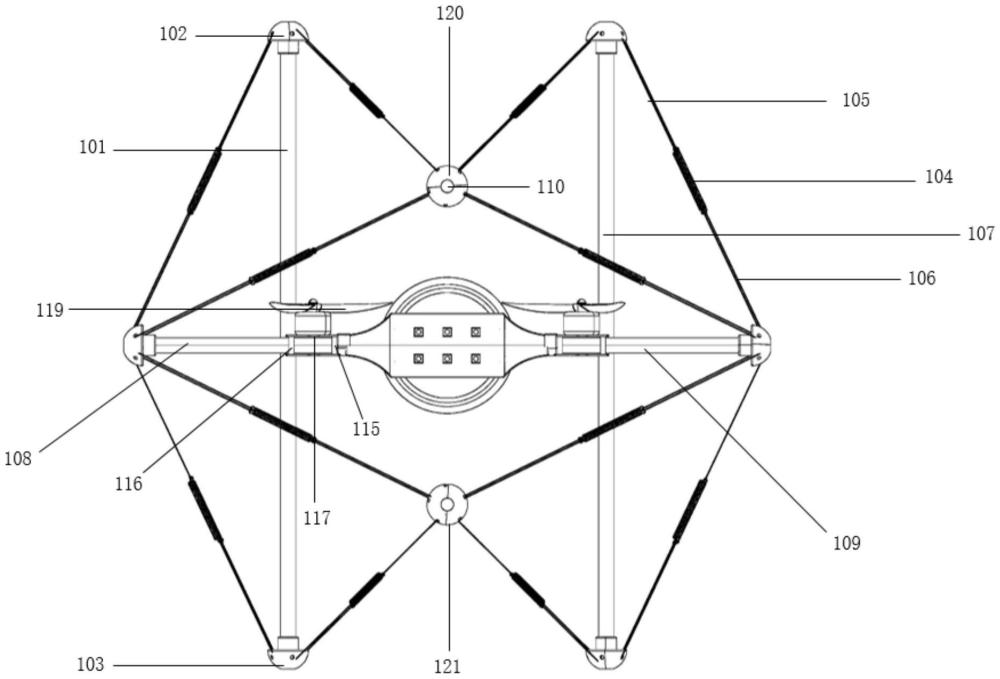
4、骨架結構,包括多個桿構件組和索構件組,其中,每個桿構件組包括兩個相對且平行設置的桿構件,桿構件組至少為三個;
5、每個所述桿構件的端部通過所述索構件與其他相鄰的所述桿構件的端部連接,形成兩個對角三角形;
6、四旋翼系統,所述四旋翼系統設于所述桿構件上,且與所述桿構件固定連接;
7、密封艙,所述密封艙設于所述骨架結構的中空內部,且與所述骨架結構固定連接。
8、優選的是,本發明的每個桿構件包括由碳纖維桿、接頭相接形成一個基本單元,所述碳纖維桿的兩端分別設置接頭;由六個基本單元構成六桿張拉整體骨架。
9、優選的是,本發明位于碳纖維桿端部的每個接頭再引出四根凱夫拉繩索與彈簧形成的結合性彈性索,所述每個端點的四根結合性彈性索分別與距離該端點最近的四個端點相連接,形成張拉網絡。
10、優選的是,本發明的四旋翼系統包括四個電機、四個管夾、四個旋翼、四片墊片;每個電機分別位于其中一個碳纖維桿上;電機通過螺釘與墊片相連接,墊片通過螺柱與位于碳纖維桿上的管夾連接;每個電機的輸出端設置旋翼。
11、優選的是,本發明的密封艙包括位于中部的中央艙體,中央艙體長度方向的兩端分別設置重力艙、浮力艙,中央艙體長度方向的外周包裹有亞克力管,亞克力管的兩端分別與重力艙、浮力艙的一端連接;重力艙、浮力艙的另一端連接有與碳纖維桿連接的組裝墊片。
12、優選的是,本發明的中央艙體包括位于上層的基板,用于搭載飛控和gps;基板上分別設置對飛控起限位作用的飛控限位板、對gps組件起限位作用的gps限位板,飛控指向與基板、飛控限位板平行;
13、基板的下部分別設置用于搭載接收機以及數傳模塊的第一艙體、用于承載四合一電調的第二艙體,第一艙體與第二艙體之間共用側板,所述側板上設置供接收機、數傳模塊天線穿出的開孔;基板的兩端分別設置插入端,用于插入重力艙、浮力艙。
14、優選的是,本發明的重力艙包括重力艙內蓋、重力艙外蓋,重力艙內蓋與重力艙外蓋之間設置用于旋轉鎖緊的第一滑軌,第一滑軌的外周設置第一樹脂層;重力艙內蓋上設置用于穿過電機線的第一開孔;重力艙內蓋上遠離重力艙外蓋的一端設置第一防水o型圈開槽,第一防水o型圈開槽與亞克力管相配合;
15、重力艙內蓋處設有用于搭載了無人機攝像頭、光流傳感器的第一凸起限位。
16、優選的是,本發明的浮力艙包括浮力艙內蓋、浮力艙外蓋,浮力艙內蓋與浮力艙外蓋之間設置用于旋轉鎖緊的第二滑軌,第二滑軌的外周設置第二樹脂層;浮力艙內蓋上設置用于穿過電機線的第二開孔;浮力艙外蓋上存在空腔;浮力艙內蓋上遠離浮力艙外蓋的一端設置第二防水o型圈開槽,第二防水o型圈開槽與亞克力管相配合;浮力艙內蓋處設有第二凸起限位。
17、優選的是,本發明的亞克力管的內壁設置使用粘合劑固定的支撐環,所述支撐環包括圓環、位于圓環內壁的圓環突出部,圓環直徑與亞克力管的內徑一致;
18、圓環、圓環突出部與基板連接,對中央艙體的基板起承托作用;在拆卸密封艙時,圓環與圓環突出部形成類似導軌對中央艙體的基板起抽拉引導作用;圓環突出部上設有寬槽;圓環與圓環突出部的連接處采用鏤空設計。
19、優選的是,本發明的重力艙外蓋、浮力艙外蓋的中部分別開有水平半圓槽,水平半圓槽的上下兩側均勻對稱分布兩行三列螺孔,用于與組裝墊片連接;所述組裝墊片包括由用于連接重力艙外蓋與浮力艙的墊片、用于電機定位的定位板。
20、21世紀以來,水空跨介質探測器(haav)的發展前景和市場需求備受關注。軍用和民用領域對氣水兩棲能力機器人的需求不斷增長,haav集成了空中飛行器和水下航行器的運動能力,面臨著巨大的發展機遇。本發明基于六桿張拉整體結構,結合密封艙系統、四旋翼系統和控制動力系統,設計出一種新型水陸空三棲探測器。該結構賦予探測器出色的彈性恢復能力和防碰撞性能,確保在復雜環境中穩定運行;密封艙系統保護內部元件,實現水陸間的無縫切換;四旋翼系統提供空中穩定性與機動性,使其能執行多種任務。這種創新設計融合了多種技術優勢,成為無人探測技術發展的新方向。
21、六桿張拉整體結構賦予了無人飛行探測器出色的彈性恢復能力和防碰撞性能,確保了在復雜環境中的穩定運行。結合密封艙系統,它保護內部元件并允許探測器在水下長時間作業,實現水陸間的無縫切換。四旋翼系統則提供了空中穩定性與機動性,使得探測器能夠執行起降、懸停和快速移動等任務,同時在地面滑行時保持穩定。這兩個系統與張拉整體結構的結合,增強了探測器的多功能性和環境適應性,使其在多種應用場景中發揮關鍵作用。
22、針對傳統無人飛行探測器無跨介質能力和防碰撞性能差、結構復雜、成本昂貴、體型相對龐大、重量相對較大、無法適應復雜環境、維護性較差、可靠性和穩定性不足等缺陷,本發明提出設計一種基于六桿張拉整體結構的水陸空三棲探測器。
23、與現有技術相比,本發明的水陸空三棲無人飛行探測器,是基于六桿張拉整體結構、防水倉系統、四旋翼系統、控制動力系統的設計,這種設計使其區別于市面上只能在單一環境(如僅空中或僅陸地)作業且剛性探測器。本發明的三棲探測器,無需額外改裝即可實現自主水空跨介質流程,在水下、陸地和空中等狹小或復雜空間進行作業,這是傳統探測器難以實現的。通過電機驅動旋翼提供動力,將控制部分集中在探測器的關鍵部位,使得探測器更輕量化、更靈活。該六桿張拉整體結構探測器的特性,適應不同環境的作業需求。本發明的主要材料為輕質復合材料,相比于傳統的探測器,更加輕量化,成本顯著降低,可實現大量生產。
24、1、本發明的無人飛行探測器控制部分與六桿張拉整體結構部分,控制部分的電機通過改變轉速與六桿張拉整體結構部分相連接,提供力矩,進而實現探測器空中飛行、陸地滑行、水下游動。結構保障探測器輕量化、防碰撞,并且探測器由一套驅動系統實現三棲運動,能耗較低,經濟效益高。
25、2、本發明的無人飛行探測器,在六桿張拉整體結構中心安裝密封艙系統、飛控、gps系統等,使其具有水下游動的能力。
26、3、本發明無人飛行探測器的驅動部分,由一套四旋翼動力系統驅動,實現水中游動、陸地滑行、空中飛行,旋翼較少,更加節省能源。
27、4、本發明無人飛行探測器的接頭與密封艙系統,可以拆卸,且由abs材料構成,成本較低。
28、5、本發明無人飛行探測器的艙體的飛控固定架部分為可抽拉式結構,拆卸方便。
29、6、本發明無人飛行探測器的密封艙系統,可根據探測器大小改變尺寸,進而靈活調整浮力,適配不同型號六桿探測器。
30、7、本發明無人飛行探測器的零件,由3d打印版材料、碳纖維桿、凱夫拉繩組成,可拆卸性強,利于維修。
- 還沒有人留言評論。精彩留言會獲得點贊!